Clear Sky Science · zh
可变形且可移动介质中手性主动布朗粒子的异常扩散
为什么微小旋转机器人很重要
想象一群微小的旋转机器人试图穿过一个迷宫,这个迷宫不是由坚硬的墙壁构成,而是由可以弯曲并能移位的柔性环组成。它们在这个迷宫中的扩散程度对理解真实的显微游动体——如细菌或医用微型机器人——如何在拥挤环境中穿行(例如土壤、凝胶或活体组织)非常关键。本研究探讨了这些“手性”运动者固有的圆周运动如何与可变形障碍物相互作用,从而产生一个意想不到的结果:在某些情况下,增加障碍物反而能使它们扩散更快。 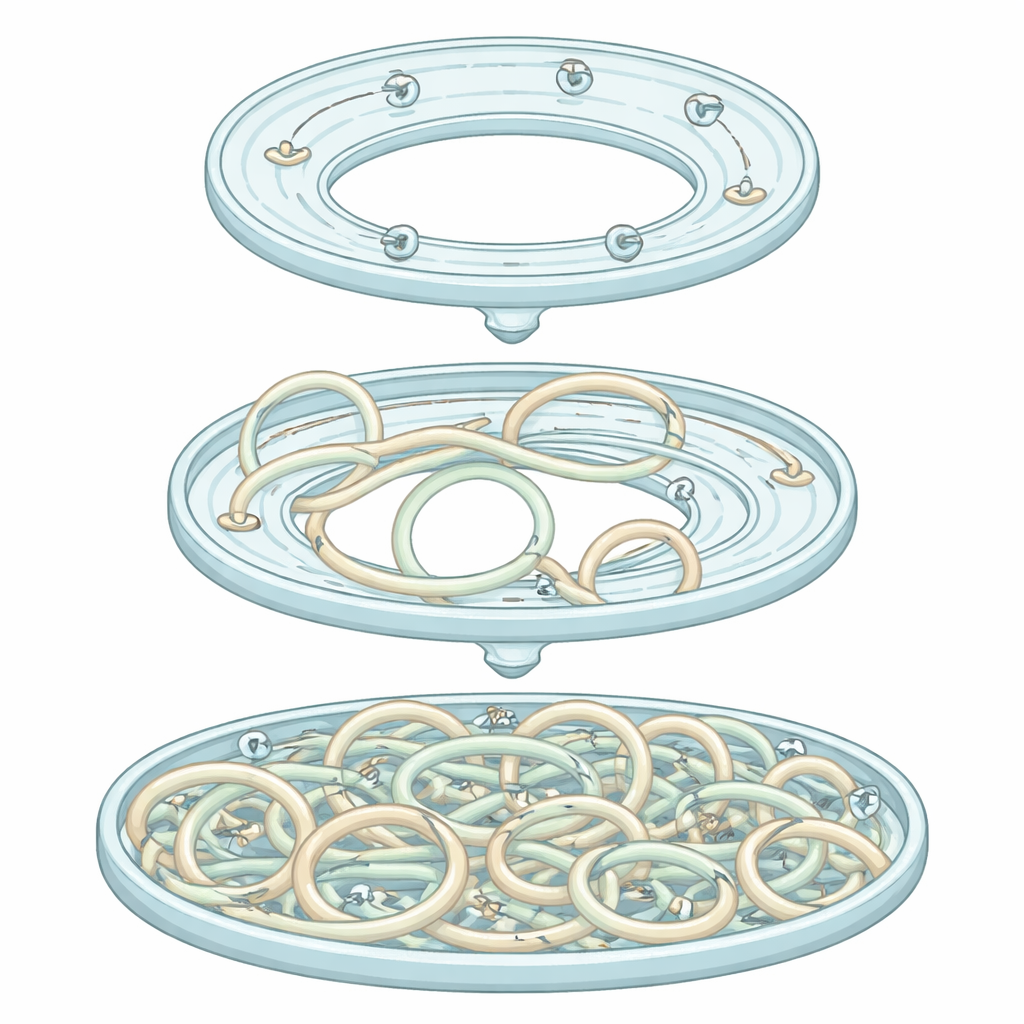
柔性迷宫中的旋转者
研究者用小型商业Hexbug机器人作为手性主动布朗粒子的模型——这些粒子既向前运动又会自转,描绘出圆形轨迹。机器人被限制在环形通道内,周围放置可在被撞击时弯曲和滑动的薄钢环。通过调整通道内环的数量,团队可以平滑地改变环境的拥挤程度,从几乎空旷到密集到运动几近停滞。随后他们追踪机器人随时间的位置,以测量它们在环内扩散的速度。
更多杂乱却意味着更快扩散
乍一看,人们可能会认为更多障碍物总会减慢机器人速度。然而,测得的扩散率——机器人在通道中散开的速率——却显示出明显的非单调模式。没有环时,机器人多在原地绕圈,净扩散量有限。随着柔性环数量增加到中等水平,机器人与环的碰撞恰到好处:可弯曲的环移动并温和地“引导”机器人进入更直、更持久的路径,从而沿通道跨越更长距离。在这一阶段,它们的有效扩散显著上升,在某些情况下相比无障碍情形几乎提高了100倍左右。但当环的占据面积变得很大时,环境变得过于拥挤,机器人频繁受阻并最终几乎被困住;此时它们的扩散又回落接近零。 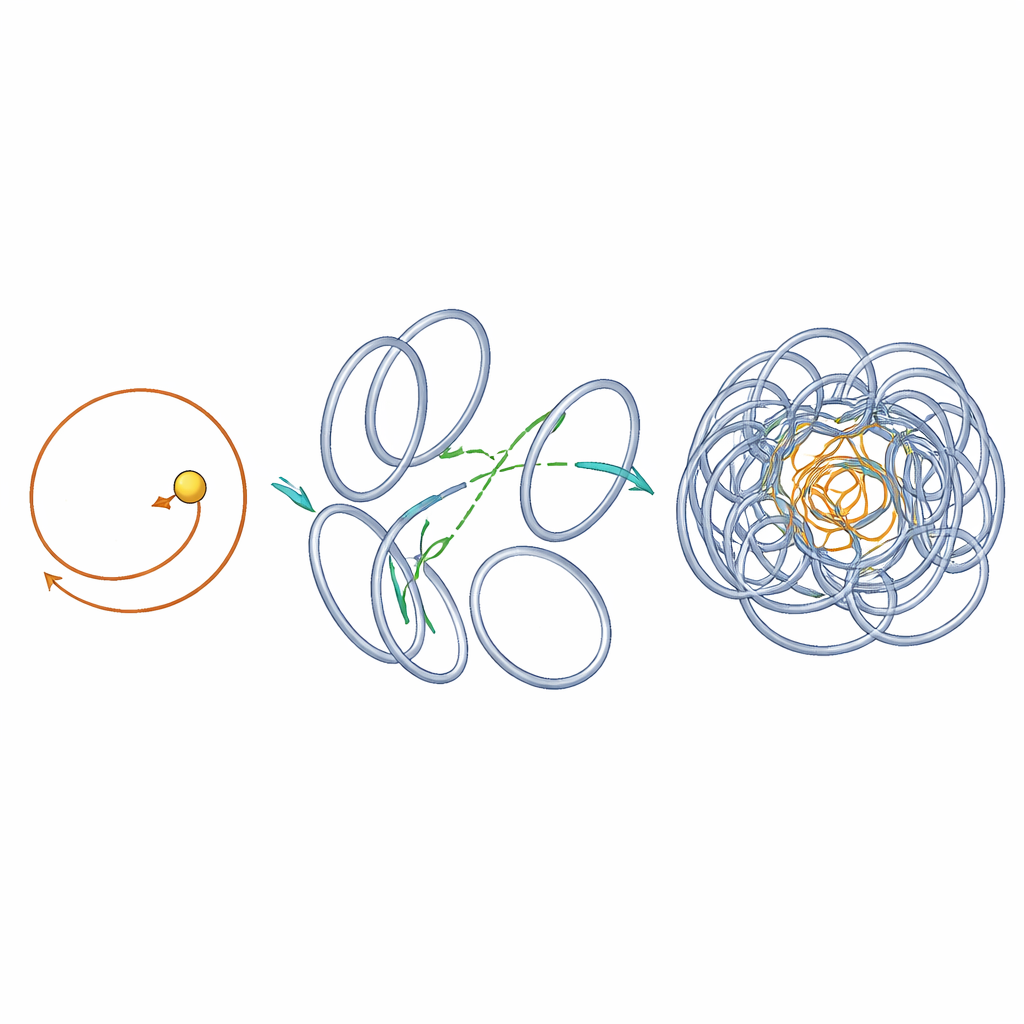
被困的环路与长程旅程
为了解释这种涨落行为,作者识别出两种主要运动模式。在“被困”状态下,机器人把附近的环推开一点,划出一个松散的笼子并在其中绕圈,几乎不位移。在“迁移”状态下,反复的擦撞使机器人朝向不断被重定向,其先天的圆周轨迹被拉直,形成类似走廊的长程路线。研究团队使用一种统计工具来追踪机器人在某一角度窗口内停留的时间,表明系统表现为慢速局域环路与快速定向行程的混合。随着障碍密度增加,机器人花在迁移上的时间增多,但它们在迁移时的前进速度又因持续阻碍而逐步降低。因此,扩散率由迁移持续时间与迁移时可达到速度之间的拉锯决定。
尺寸与自转如何改变结果
并非所有机器人都同样受益于柔性迷宫。那些圆轨道较小的机器人,本身扩散性较差,在加入障碍后经历了最大的相对扩散提升。轨道较大的机器人在自由空间中已经能更有效地游走,因此相同程度的障碍引导对它们的优势较小。研究还表明,产生最佳扩散的障碍密度随轨道大小而变化:扫过更大圆周的机器人在较低的障碍密度下就能达到扩散峰值,因为它们每圈碰撞的环更多,重定向频率更高。
对现实世界主动物质的意义
简言之,这项工作表明,柔软且可重构的环境可以把圆周自驱动运动转化为高效的长程输运——但有其限度。柔性障碍像可调节的交通隔栏:在中等密度下,它们将游走的旋转者引入快速通道;在过度拥挤时,它们又形成阻塞使运动停滞。这些见解有助于解释手性微游动体如何穿越复杂的天然环境,并为通过精心调控微人形机器人固有的旋转行为以及周围环境的柔性与密度,去引导其在组织或多孔材料中行进提供了设计原则。
引用: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
关键词: 主动物质, 微游动体, 手性粒子, 扩散, 复杂介质