Clear Sky Science · tr
Değiştirilebilir ve yer değiştirebilen ortamlarda kiral aktif Brownian parçacıklarının alışılmadık difüzyonu
Neden küçük dönen robotlar önemli
Katı duvarlardan değil de yolundan kayabilecek, yumuşak ve bükülebilir halkalardan oluşan bir labirentte hareket etmeye çalışan, küçük dönen robot sürüsünü hayal edin. Bu labirentte ne kadar iyi yayıldıkları, gerçek mikroskobik yüzücülerin—bakteriler veya tıbbi mikro-robotlar gibi—toprak, jeller veya canlı doku gibi kalabalık ortamlarda nasıl hareket ettiğini anlamak için beklenenden daha önemli çıkıyor. Bu çalışma, bu “kiral” hareketlilerin yerleşik dairesel hareketinin esnek engellerle nasıl etkileştiğini ve beklenmedik bir sonuca yol açtığını inceliyor: bazı durumlarda engel sayısını artırmak, onların daha hızlı yayılmasını sağlayabiliyor. 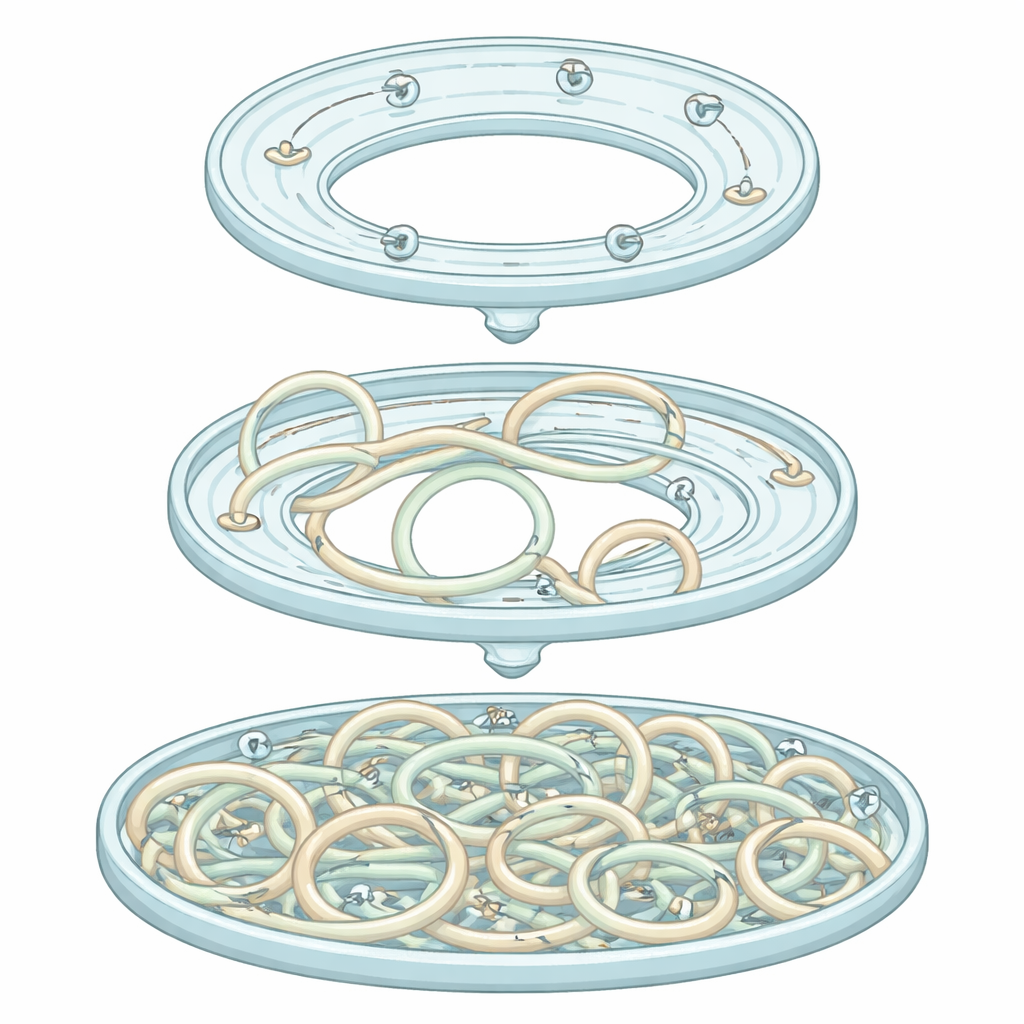
Yumuşak bir labirentte dönenler
Araştırmacılar, kiral aktif Brownian parçacıkların yerine geçen küçük ticari Hexbug robotlarını kullanarak bu tür yüzücülere masaüstü bir model kurdular—ilerleyen ve doğal olarak dönerek dairesel yollar çizen nesneler. Bu robotlar halka biçimli bir kanala hapsedildi ve çarpıldıklarında bükülebilen ve kayabilen ince çelik halkalarla çevrelendi. Kanal içine yerleştirilen halka sayısını ayarlayarak ekip, ortamın ne kadar kalabalık ve dolambaçlı olduğunu neredeyse boş olandan hareketin neredeyse durduğu noktaya kadar yumuşakça ayarlayabildi. Daha sonra robotların zamana göre konumlarını izleyip kanal boyunca ne kadar hızlı dolaştıklarını ölçtüler.
Daha fazla karmaşa daha hızlı yayılma demek olduğunda
İlk bakışta, daha fazla engelin robotları her zaman yavaşlatması beklenebilir. Bunun yerine ölçülen difüzyon—robotların kanal etrafında ne kadar hızla yayıldığı—çarpıcı bir şekilde tekdüze olmayan bir desen gösterdi. Hiç halka yokken robotlar çoğunlukla yerinde daire çiziyordu, bu yüzden net yayılma sınırlıydı. Yumuşak halka sayısı orta düzeye çıktıkça robotlar onlarla tam da doğru biçimde çarpıştı: esnek halkalar kaydı ve robotları kanal boyunca uzun mesafeler kat eden daha düz, daha kalıcı yollara nazikçe “yönlendirdi”. Bu rejimde etkin difüzyonları arttı; bazı durumlarda engelsiz vakayla kıyaslandığında neredeyse 100 kat daha yüksek oldu. Ancak halka alanı çok büyük hale geldiğinde ortam o kadar kalabalıklaştı ki robotlar sürekli engellendi ve sonunda neredeyse hareketsizleşti; difüzyonları tekrar sıfıra doğru düştü. 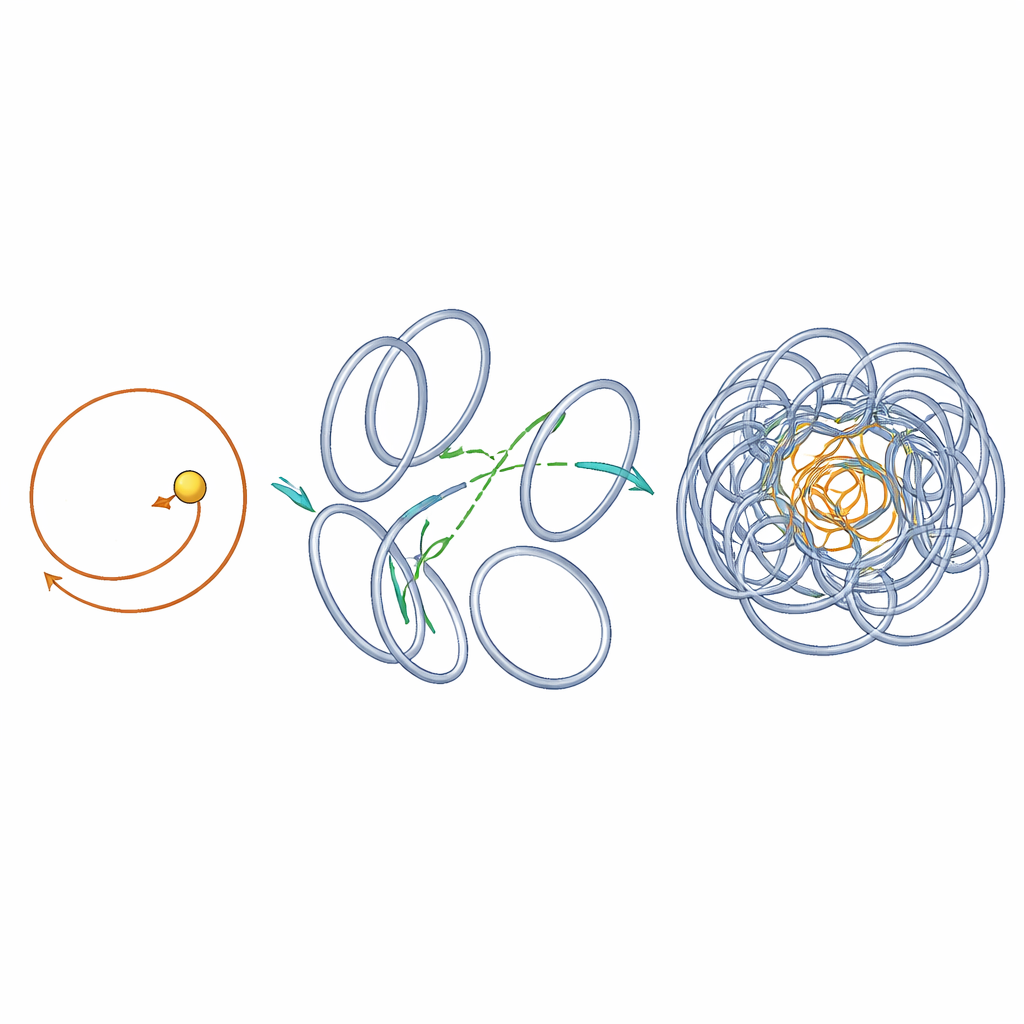
Hapsetmiş döngüler ve uzun yolculuklar
Bu yükseliş-ve-düşüş davranışını anlamlandırmak için yazarlar iki ana hareket modunu tanımladı. “Hapsetme” durumunda bir robot, çevresindeki halkaları biraz iterek gevşek bir kafes kazıyor ve sonra içinde daire çizerek az mesafe kat ediyor. “Göç” durumunda ise halkalarla art arda gerçekleşen temaslar robotu üst üste yeniden yönlendiriyor ve doğal dairesel yolu uzun, koridor benzeri bir hattâ düze dönüşüyor. Robotun belirli bir açısal pencere içinde ne kadar süre kaldığını izleyen istatistiksel bir araç kullanarak ekip, sistemin yavaş, yerel döngüler ile hızlı, yönlü yolculukların karışımı gibi davrandığını gösterdi. Engel yoğunluğu arttıkça robotlar daha fazla göç etmeye başlıyor, fakat sürekli engellenme nedeniyle ileri hızları giderek azalıyor. Bu nedenle difüzyon hızı, ne kadar süre göç ettikleri ile göç ederken ne kadar hızlı hareket edebildikleri arasındaki bir çekişme tarafından belirleniyor.
Boyut ve dönüş hızının sonucu nasıl değiştirdiği
Tüm robotlar yumuşak labirentten eşit derecede fayda sağlamadı. Kendi başlarına daha az difüz olan, daha küçük dairesel yörüngelere sahip olanlar, engeller eklendiğinde yayılmada en büyük göreli artışı yaşadı. Daha büyük yörüngeli robotlar zaten serbest alanda daha etkili dolaştığı için engellerin aynı yönlendirme etkisi onlara daha küçük bir avantaj sağladı. Çalışma ayrıca optimal yayılma sağlayan engel yoğunluğunun yörünge büyüklüğüyle kaydığını gösterdi: daha büyük daireler çizen robotlar, tur başına daha fazla halkayla çarpıştıkları ve daha sık yönlendirildikleri için maksimum difüzyona daha düşük engel yoğunluklarında ulaşıyor.
Gerçek dünyadaki aktif madde için ne anlama geliyor
Basitçe söylemek gerekirse, bu çalışma yumuşak, yeniden yapılandırılabilir bir ortamın dairesel, kendi kendine itişli hareketi etkin uzun menzilli ulaşıma dönüştürebileceğini gösteriyor—ama bir sınıra kadar. Esnek engeller ayarlanabilir trafik bariyerleri gibi davranıyor: orta yoğunluklarda dolaşan dönenleri express koridorlara yönlendiriyor; aşırı kalabalık olduğunda ise hareketi durduran trafik sıkışıklıkları yaratıyorlar. Bu bulgular, kiral mikroyüzücülerin karmaşık doğal peyzajlarda nasıl yol alabileceğini açıklamaya yardımcı oluyor ve hem onların içsel dairesel davranışını hem de çevrelerinin esnekliğini ve yoğunluğunu dikkatle ayarlayarak yapay mikrorobotları doku veya gözenekli malzemeler içinde yönlendirmek için tasarım kuralları öneriyor.
Atıf: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
Anahtar kelimeler: aktif madde, mikro-yüzücüler, kiral parçacıklar, difüzyon, karmaşık ortamlar