Clear Sky Science · he
דיפוזיה לא שגרתית של חלקיקים בראוניאניים אקטיביים כיראליים במדיה גמישה וניתנת להזזה
למה רובוטים זעירים מסתובבים חשובים
דמיינו נחיל של רובוטים זעירים מסתובבים שמנסים לנוע במבוך שאינו עשוי מקירות קשיחים אלא מטבעות רכים וגמישים שיכולים להתעקל ולהזיז את מקומם. עד כמה הם מתפשטים בתוך אותו מבוך חשוב באופן מפתיע להבנת התנועה של שחיינים מיקרוסקופיים אמיתיים — כמו חיידקים או מיקרורובוטים רפואיים — במקומות צפופים כגון קרקעות, ג׳לים או רקמות חיות. המחקר הזה בוחן כיצד התנועה המעגלית הטבועה של הנעים ה"כיראליים" האלה משתלבת עם המכשולים הגמישים כדי ליצור תוצאה בלתי צפויה: במקרים מסוימים, הוספת מכשולים יכולה אפילו להאיץ את התפשטותם. 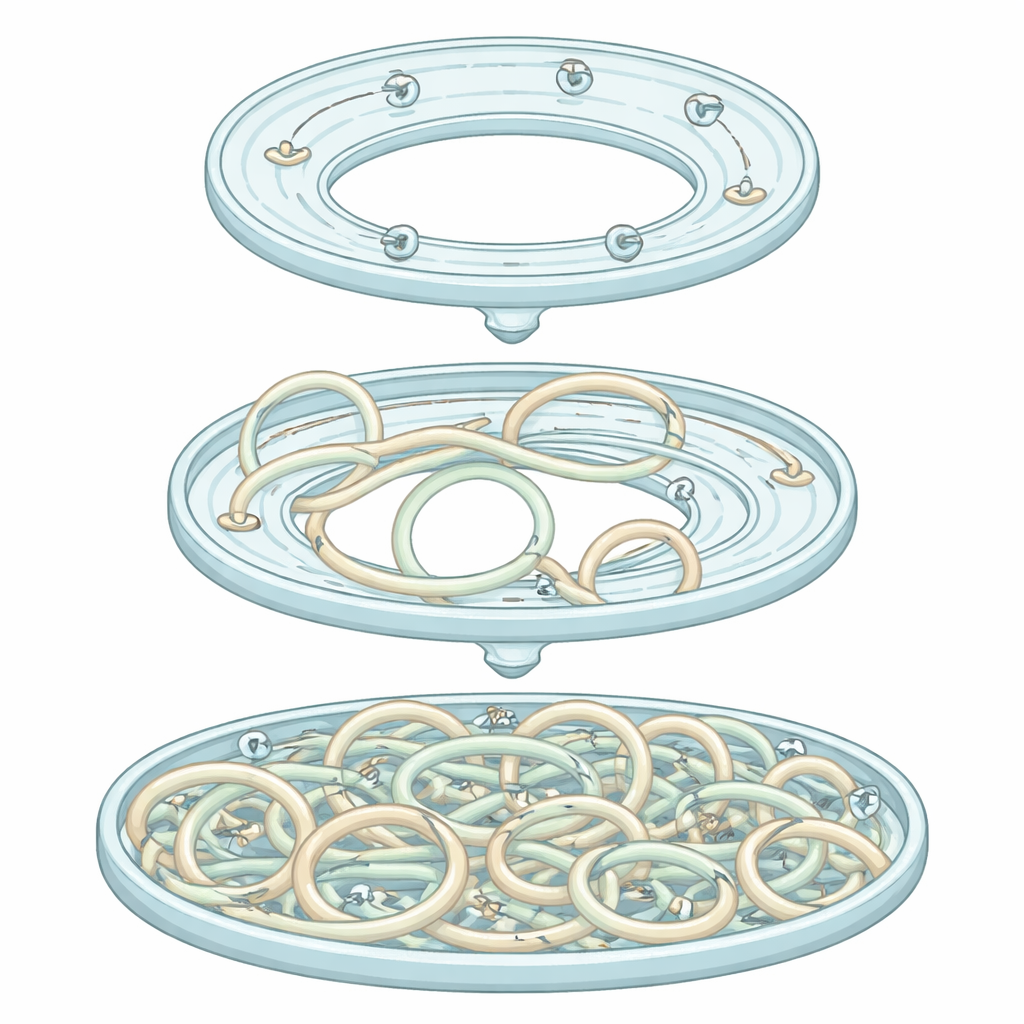
מסתובבים במבוך רך
החוקרים בנו דגם שולחני של שחיינים כאלה באמצעות רובוטוני Hexbug קטנים כמחליפים לחלקיקים בראוניאניים אקטיביים כיראליים — גופים שנעים קדימה ובמקביל פונים באופן טבעי ויוצרים מסלולים מעגליים. הרובוטים הוגבלו למסלול בצורת טבעת והוקפו על ידי טבעות פלדת דקות שיכלו להתכופף ולהחליק כשהן נתקעות. על ידי שינוי מספר הטבעות שהוכנסו לתעלה, הצוות יכול היה לכוונן בצורה חלקה עד כמה הסביבה צפופה ומפותלת, החל כמעט ריקה ועד צפיפות כה גבוהה שהתנועה כמעט נעצרת. לאחר מכן הם עקבו אחר מיקומי הרובוטים לאורך זמן כדי למדוד עד כמה מהר הם מתפזרים לאורך הטבעת.
כשיותר עומס אומר התפשטות מהירה יותר
מבט ראשון עשוי להניח שמכשולים רבים תמיד יאטו את הרובוטים. במקום זאת, הדיפוזיה שנמדדה — קצב התפשטות הרובוטים בערוץ — הראתה תבנית לא מונוטונית בולטת. ללא טבעות, הרובוטים כמעט סיבבו במקום, ולכן התפשטותם נטו הייתה יחסית מועטה. ככל שמספר הטבעות הרכות גדל לרמה מתונה, הרובוטים התנגשו בהן בצורה שמאפשרת לטבעות הגמישות להיזוז ולהכווין בעדינות את הרובוטים למסלולים ישרים וחזקים יותר שנמשכים מרחקים ארוכים לאורך התעלה. באזור זה, הדיפוזיה האפקטיבית זינקה, בחלק מהמקרים בכמעט פי 100 בהשוואה למצב ללא מכשולים. אך כאשר שטח הטבעות הפך להיות גדול מאוד, הסביבה הפכה כה צפופה שהרובוטים נחסמו שוב ושוב ובסופו של דבר כמעט הוקפאו; הדיפוזיה שלהם ירדה חזרה בערך לאפס. 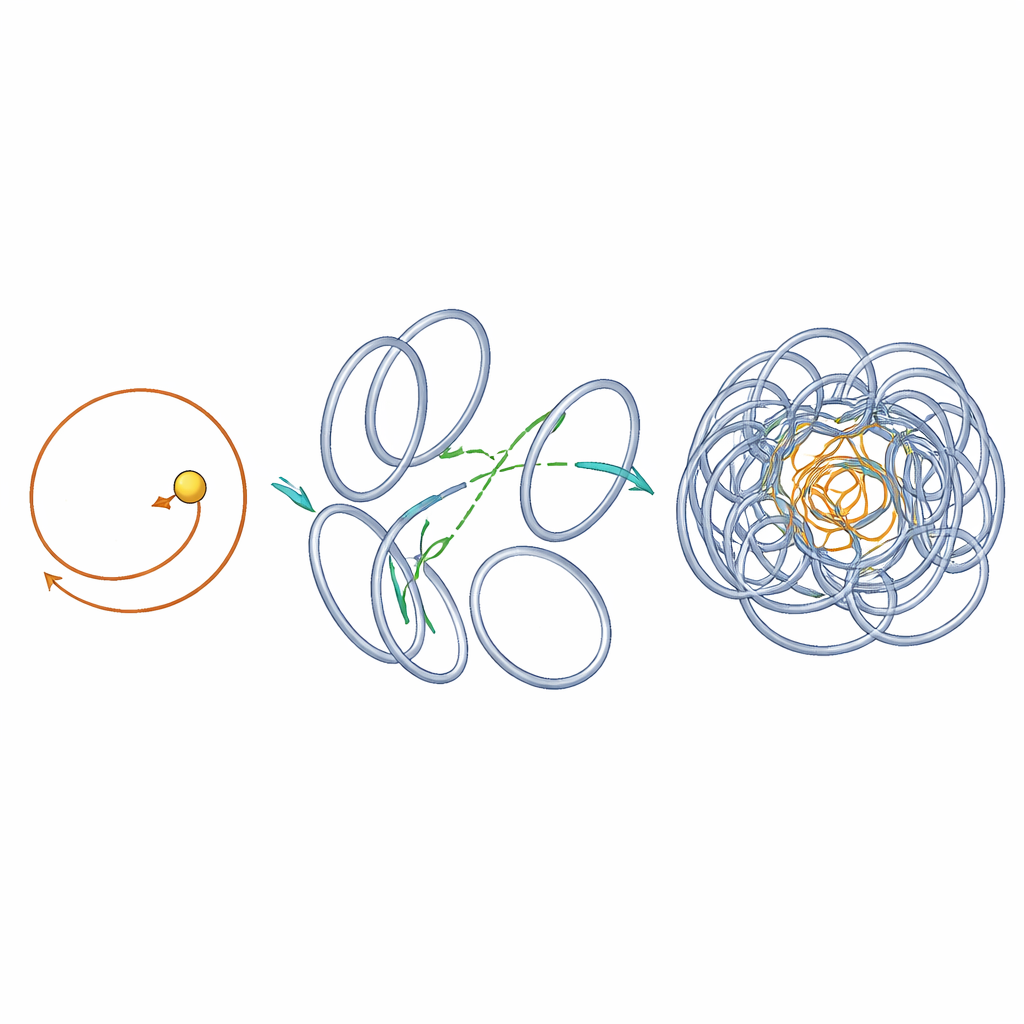
לולאות כלואות ונסיעות ארוכות
כדי להבין את ההתנהגות של העלייה והנפילה הזו, המחברים זיהו שני מצבי תנועה עיקריים. במצב של "כלא" רובוט דוחף את הטבעות הסמוכות לצדדים מספיק כדי לחצוב כלוב רופף ואז מסובב בתוכו, וכך מכסה מעט שטח. במצב של "הגירה" התיקולים החוזרים עם הטבעות משנים לקו ישר את המסלול המעגלי הטבעי של הרובוט עד שהוא הופך לנתיב ארוך בסגנון מסדרון. באמצעות כלי סטטיסטי שעוקב כמה זמן רובוט נשאר בתוך חלון זוויתי מסוים, הצוות הראה שהמערכת מתנהגת כמו תערובת של לולאות איטיות וממוקדות ונסיעות מהירות ומכוונות. עם עליית צפיפות המכשולים, הרובוטים מבלים יותר זמן בהגירה, אך מהירותם הקדמית מצטמצמת בהדרגה עקב ההפרעות התמידיות. לכן, קצב הדיפוזיה נקבע על ידי מאבק בין משך ההגירה לבין המהירות שבה הם יכולים לנוע בזמן ההגירה.
איך גודל וסיבוב משנים את התוצאה
לא כל הרובוטים נהנו באותה מידה מהמבוך הרך. אלה בעלי מסלולים מעגליים קטנים יותר, שהיו פחות דיפוסיביים בפני עצמם, קיבלו את הגברת התפשטות היחסית הגדולה ביותר כאשר נוספו מכשולים. רובוטים בעלי מסלולים גדולים כבר שוטטו ביעילות יחסית בחלל חופשי, לכן אותו רמה של כיוונון על ידי המכשולים נותנת להם יתרון קטן יותר. המחקר הראה גם כי צפיפות המכשולים שמניבה את התפשטות השיא משתנה עם גודל המסלול: רובוטים שסורגים מעגלים גדולים מגיעים לשיא הדיפוזיה בצפיוּת מכשולים נמוכה יותר, משום שהם מתנגשים ביותר טבעות לכל סיבוב ומכוונים מחדש לעתים תכופות יותר.
מה משמעות הדבר לחומר אקטיבי בעולם האמיתי
במילים פשוטות, הממצא חושף שסביבה רכה וניתנת להתאמה יכולה להפוך תנועה מעגלית הנעה-עצמית להובלה מרחבית יעילה — עד גבול מסוים. המכשולים הגמישים פועלים כמו מחסומי תנועה מתכווננים: בצפיפויות מתונות הם מנהלים מסתובבים משוטטים לכבישי אקספרס; כשיש צפיפות יתר הם יוצרים פקקי תנועה שמעצרים תנועה. תובנות אלו מסבירות כיצד מיקרו-שחיינים כיראליים עשויים לנווט בנופים טבעיים מורכבים ומציעות כללי תכנון להכוונת מיקרורובוטים מלאכותיים דרך רקמות או חומרים מזוּרקים על ידי כוונון זהיר הן של דפוס המעגל שלהם והן של גמישות וצפיפות הסביבה.
ציטוט: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
מילות מפתח: חומר אקטיבי, מיקרו-שחיינים, חלקיקים כיראליים, דיפוזיה, מדיות מורכבות