Clear Sky Science · en
Unusual diffusion of chiral active Brownian particles in deformable and displaceable media
Why tiny spinning robots matter
Imagine a swarm of tiny, spinning robots trying to move through a maze made not of rigid walls, but of soft, bendable hoops that can shift out of the way. How well they spread out through this maze turns out to be surprisingly important for understanding how real microscopic swimmers—like bacteria or medical microrobots—travel through crowded places such as soil, gels, or living tissue. This study explores how the built-in circular motion of these “chiral” movers combines with flexible obstacles to create an unexpected outcome: in some cases, adding more obstacles can actually make them spread faster. 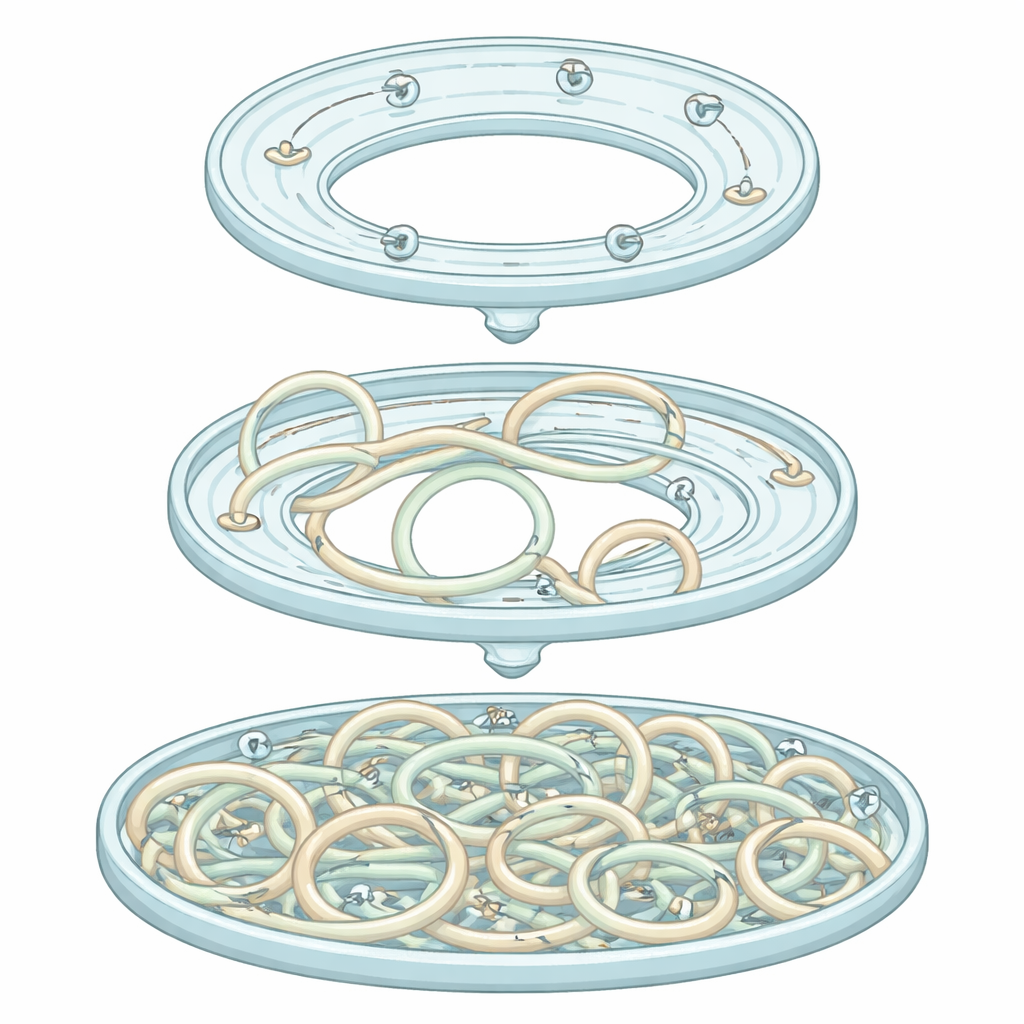
Spinners in a soft maze
The researchers built a table-top model of such swimmers using small commercial Hexbug robots as stand-ins for chiral active Brownian particles—objects that both move forward and naturally turn, tracing out circular paths. These robots were confined to a ring-shaped track and surrounded by thin steel rings that could bend and slide when hit. By adjusting how many rings they placed inside the channel, the team could smoothly tune how crowded and convoluted the environment was, from almost empty to so packed that motion nearly stopped. They then tracked the robots’ positions over time to measure how quickly they wandered around the ring.
When more clutter means faster spreading
At first glance, one might expect that more obstacles would always slow the robots down. Instead, the measured diffusion—the rate at which robots spread around the channel—showed a striking nonmonotonic pattern. With no rings, the robots mostly circled in place, so their net spreading was modest. As the number of soft rings increased to a moderate level, the robots collided with them in just the right way: the flexible rings shifted and gently “steered” the robots into straighter, more persistent paths that spanned long distances along the channel. In this regime, their effective diffusion shot up, in some cases by nearly a factor of 100 compared with the obstacle-free case. But when the ring area became very large, the environment grew so crowded that the robots were repeatedly blocked and eventually almost immobilized; their diffusion then dropped back toward zero. 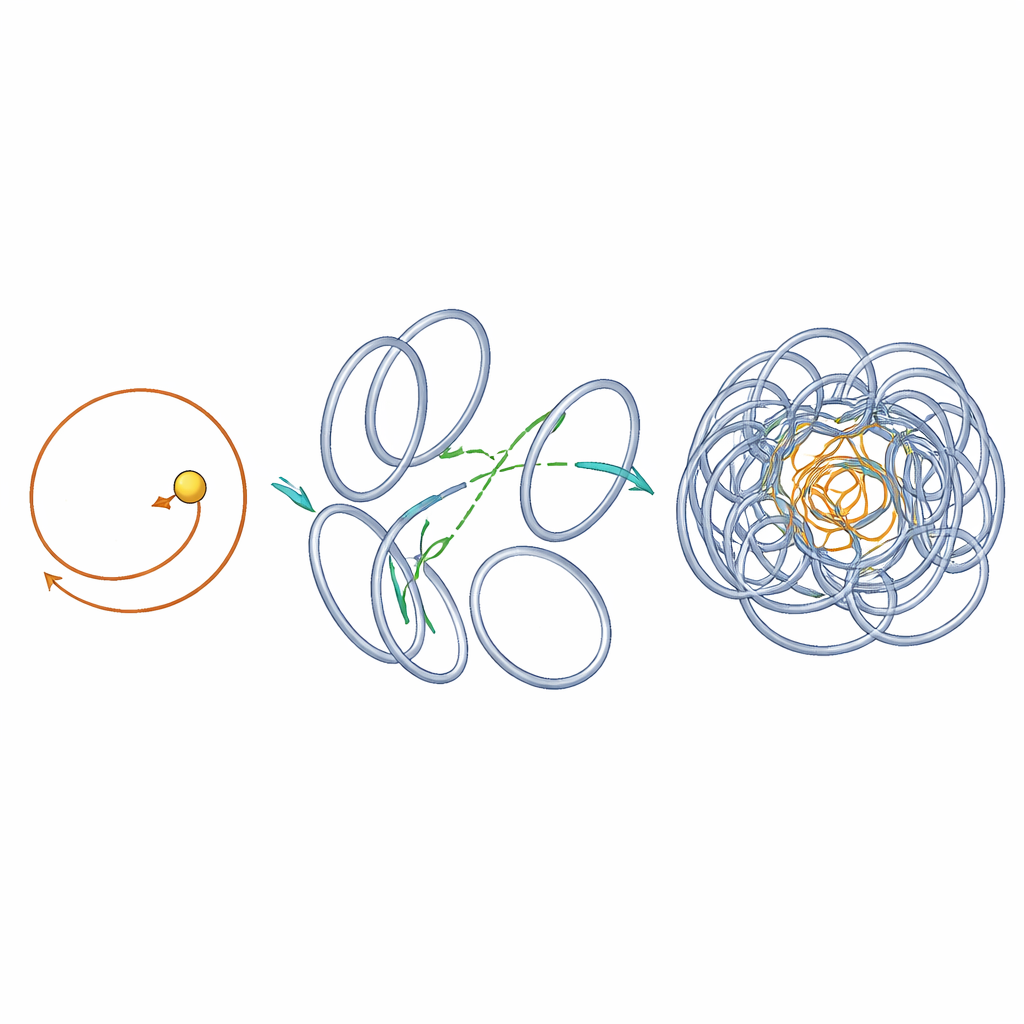
Trapped loops and long journeys
To make sense of this rise-and-fall behavior, the authors identified two main modes of motion. In a “trapped” state, a robot pushes nearby rings aside just enough to carve out a loose cage and then circles inside it, covering little ground. In a “migrating” state, repeated glancing collisions with rings successively reorient the robot so that its natural circular path straightens into a long, corridor-like route. Using a statistical tool that tracks how long a robot stays within a certain angular window, the team showed that the system behaves like a mixture of slow, localized loops and fast, directed journeys. As obstacle density increases, robots spend more time migrating, but their forward speed is gradually reduced by constant obstruction. The diffusion rate is therefore set by a tug-of-war between how long they migrate and how fast they can move while doing so.
How size and spin change the outcome
Not all robots benefited equally from the soft maze. Those with smaller circular orbits, which are less diffusive on their own, experienced the largest relative boost in spreading when obstacles were added. Larger-orbit robots already wander more effectively in free space, so the same level of steering by obstacles gives them a smaller advantage. The study also showed that the obstacle density that produces optimal spreading shifts with orbit size: robots that sweep out larger circles reach their peak diffusion at lower obstacle densities, because they collide with more rings per lap and are reoriented more frequently.
What this means for real-world active matter
In simple terms, the work reveals that a soft, reconfigurable environment can turn circular, self-propelled motion into efficient long-range transport—up to a point. Flexible obstacles act like adjustable traffic barriers: at moderate densities, they funnel wandering spinners into express lanes; when overcrowded, they create traffic jams that halt motion. These insights help explain how chiral microswimmers might navigate complex natural landscapes and suggest design rules for guiding artificial microrobots through tissues or porous materials by carefully tuning both their intrinsic circling behavior and the flexibility and density of their surroundings.
Citation: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
Keywords: active matter, microswimmers, chiral particles, diffusion, complex media