Clear Sky Science · pl
Nietypowa dyfuzja chiralnych aktywnych cząstek Browna w środowiskach odkształcalnych i przesuwnych
Dlaczego małe wirujące roboty mają znaczenie
Wyobraź sobie roj małych, wirujących robotów próbujących przedrzeć się przez labirynt zrobiony nie z sztywnych ścian, lecz z miękkich, giętkich pierścieni, które mogą się przesuwać. To, jak dobrze rozprzestrzeniają się w takim labiryncie, okazuje się zaskakująco istotne dla zrozumienia, jak prawdziwe mikropływaki — na przykład bakterie lub medyczne mikroroboty — przemieszczają się w zatłoczonych środowiskach, takich jak gleba, żele czy tkanka. W badaniu tym analizowano, jak wbudowany, kolisty ruch tych „chiralnych” ruchomych obiektów łączy się z elastycznymi przeszkodami, dając nieoczekiwany rezultat: w pewnych warunkach zwiększenie liczby przeszkód może faktycznie przyspieszyć ich rozprzestrzenianie się. 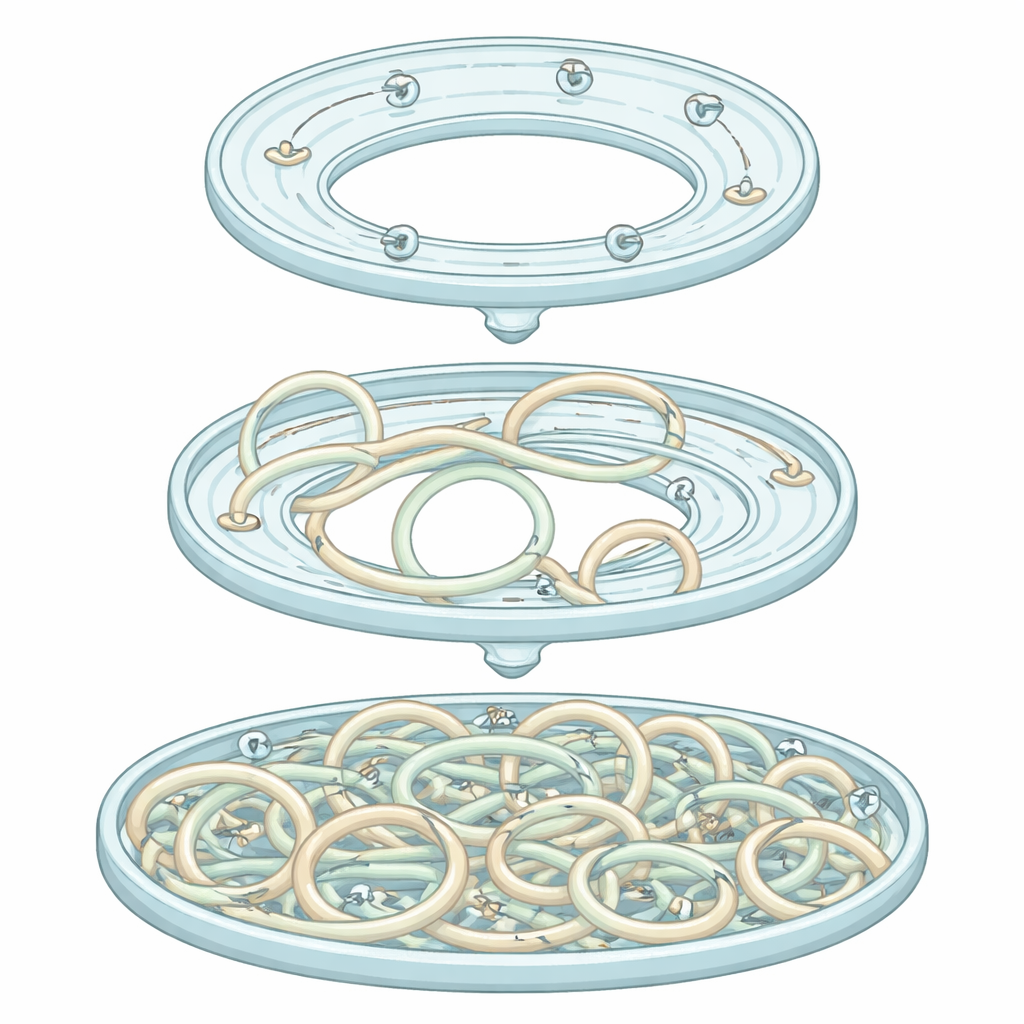
Wirujące w miękkim labiryncie
Naukowcy zbudowali stołowy model takich pływaków, używając małych komercyjnych robotów Hexbug jako reprezentantów chiralnych aktywnych cząstek Browna — obiektów, które jednocześnie poruszają się do przodu i naturalnie skręcają, kreśląc ścieżki kołowe. Roboty umieszczono w pierścieniowym torze otoczonym cienkimi stalowymi obręczami, które mogły się wyginać i przesuwać przy zderzeniu. Poprzez regulację liczby obręczy w kanale zespół mógł płynnie zmieniać stopień zatłoczenia i zawiłości środowiska — od niemal pustego do tak zapchanego, że ruch niemal ustawał. Następnie śledzili pozycje robotów w czasie, aby zmierzyć, jak szybko wędrują wokół toru.
Kiedy więcej przeszkód oznacza szybsze rozprzestrzenianie się
Na pierwszy rzut oka można by oczekiwać, że więcej przeszkód zawsze spowolni roboty. W rzeczywistości mierzona dyfuzja — tempo, w jakim roboty rozprzestrzeniają się po kanale — wykazała wyraźny niemonotoniczny wzorzec. Bez obręczy roboty przeważnie krążyły w miejscu, więc ich netto rozprzestrzenianie było niewielkie. W miarę zwiększania liczby miękkich pierścieni do umiarkowanego poziomu roboty zderzały się z nimi w taki sposób, że elastyczne obręcze przesuwały się i delikatnie „kierowały” robotami na prostsze, bardziej uporczywe trajektorie przebiegające na znaczne odległości wzdłuż kanału. W tym reżimie ich efektywna dyfuzja skoczyła, w niektórych przypadkach prawie stukrotnie w porównaniu do sytuacji bez przeszkód. Jednak gdy powierzchnia zajmowana przez obręcze stała się bardzo duża, środowisko zrobiło się tak zatłoczone, że roboty były wielokrotnie blokowane i w końcu niemal unieruchomione; ich dyfuzja wtedy spadła z powrotem w kierunku zera. 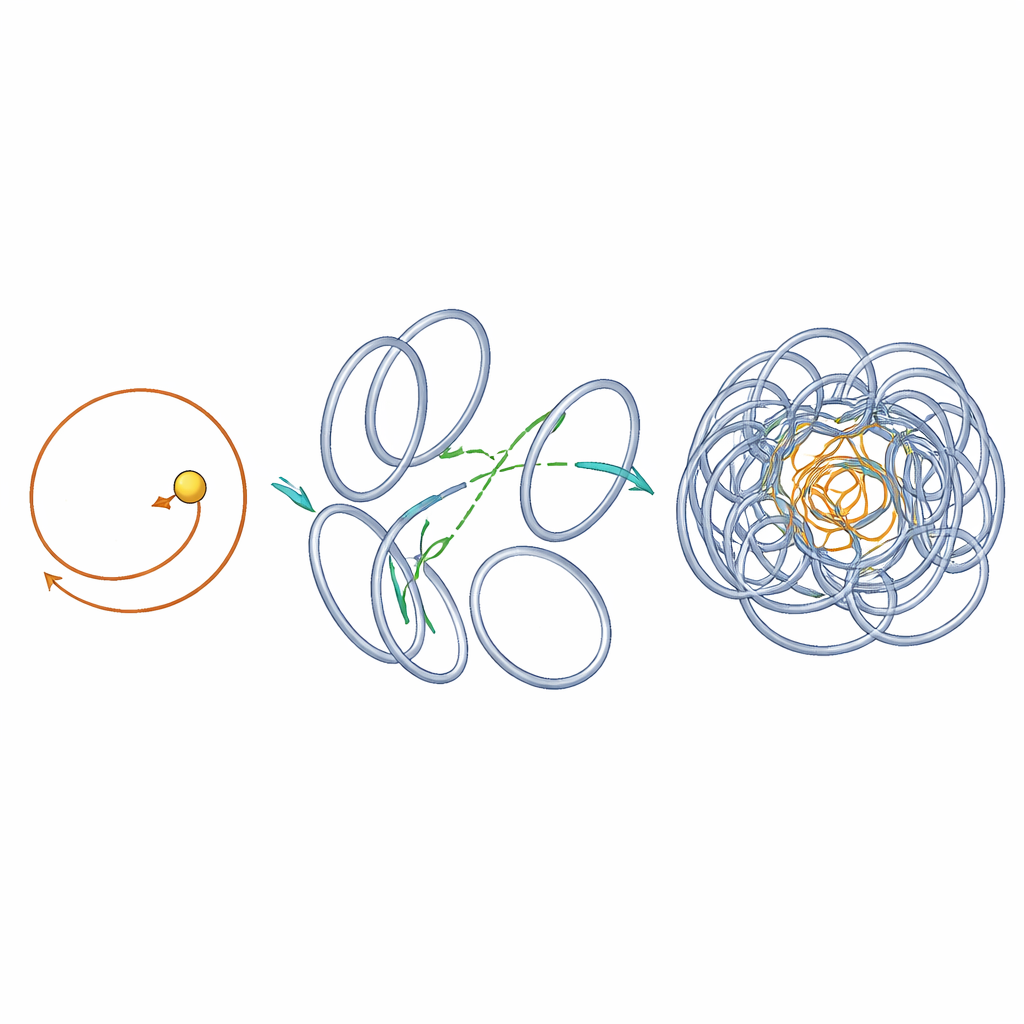
Zatrzaskane pętle i długie wędrówki
Aby wyjaśnić to zachowanie w kształcie wzrostu i spadku, autorzy wyróżnili dwa główne tryby ruchu. W stanie „uwięzienia” robot odpycha pobliskie obręcze na tyle, by wydrążyć luźną klatkę, a następnie krąży w jej wnętrzu, pokonując niewielkie dystanse. W stanie „migracji” powtarzające się poboczne zderzenia z obręczami stopniowo przestawiają robota tak, że jego naturalna kołowa trajektoria prostuje się w długą, korytarzową trasę. Korzystając z narzędzia statystycznego śledzącego, jak długo robot przebywa w określonym kącie, zespół wykazał, że układ zachowuje się jak mieszanina wolnych, zlokalizowanych pętli oraz szybkich, ukierunkowanych podróży. Wraz ze wzrostem gęstości przeszkód roboty spędzają więcej czasu na migracji, ale ich prędkość postępowa stopniowo maleje z powodu ciągłych blokad. Stąd tempo dyfuzji ustalane jest przez przeciąganie liny między tym, jak długo migrują, a jak szybko potrafią się poruszać podczas migracji.
Jak rozmiar i obrót zmieniają rezultat
Nie wszystkie roboty zyskały równie dużo dzięki miękkiemu labiryntowi. Te o mniejszych orbitach kołowych, które same w sobie są mniej dyfuzyjne, odnotowały największy względny wzrost rozprzestrzeniania po dodaniu przeszkód. Roboty o większych orbitach już w przestrzeni wolnej poruszają się efektywniej, więc ten sam stopień „kierowania” przez przeszkody daje im mniejszą przewagę. Badanie wykazało także, że gęstość przeszkód dająca optymalne rozprzestrzenianie przesuwa się wraz z rozmiarem orbity: roboty zataczające większe koła osiągają szczytową dyfuzję przy niższych gęstościach przeszkód, ponieważ w każdej rundzie częściej zderzają się z obręczami i są częściej reorientowane.
Co to oznacza dla aktywnej materii w praktyce
Mówiąc prosto, praca pokazuje, że miękkie, rekonfigurowalne środowisko może przekształcić kolisty, samo-napędzany ruch w efektywny transport na duże odległości — ale tylko do pewnego stopnia. Elastyczne przeszkody działają jak regulowane bariery drogowe: przy umiarkowanej gęstości kierują błąkające się wirujące obiekty na ekspresowe pasy; przy przepełnieniu tworzą korki, które zatrzymują ruch. Te obserwacje pomagają wyjaśnić, jak chiralne mikropływaki mogą poruszać się w złożonych naturalnych krajobrazach i sugerują zasady projektowania służące prowadzeniu sztucznych mikrorobotów przez tkanki lub porowate materiały przez staranne dostrojenie zarówno ich wewnętrznego krążenia, jak i elastyczności oraz gęstości otoczenia.
Cytowanie: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
Słowa kluczowe: aktywna materia, mikropływacy, cząstki chiralne, dyfuzja, złożone ośrodki