Clear Sky Science · pt
Difusão incomum de partículas Brownianas ativas quirais em meios deformáveis e deslocáveis
Por que pequenos robôs giratórios importam
Imagine um enxame de pequenos robôs giratórios tentando se mover por um labirinto feito não de paredes rígidas, mas de aros flexíveis que podem se curvar e deslocar. A eficiência com que eles se espalham por esse labirinto revela-se surpreendentemente importante para entender como nadadores microscópicos reais — como bactérias ou microrrobôs médicos — se deslocam por ambientes lotados, como solo, géis ou tecidos vivos. Este estudo explora como o movimento circular intrínseco desses deslocadores “quirais” combina-se com obstáculos flexíveis para produzir um resultado inesperado: em alguns casos, adicionar mais obstáculos pode, na verdade, fazê-los se espalhar mais rápido. 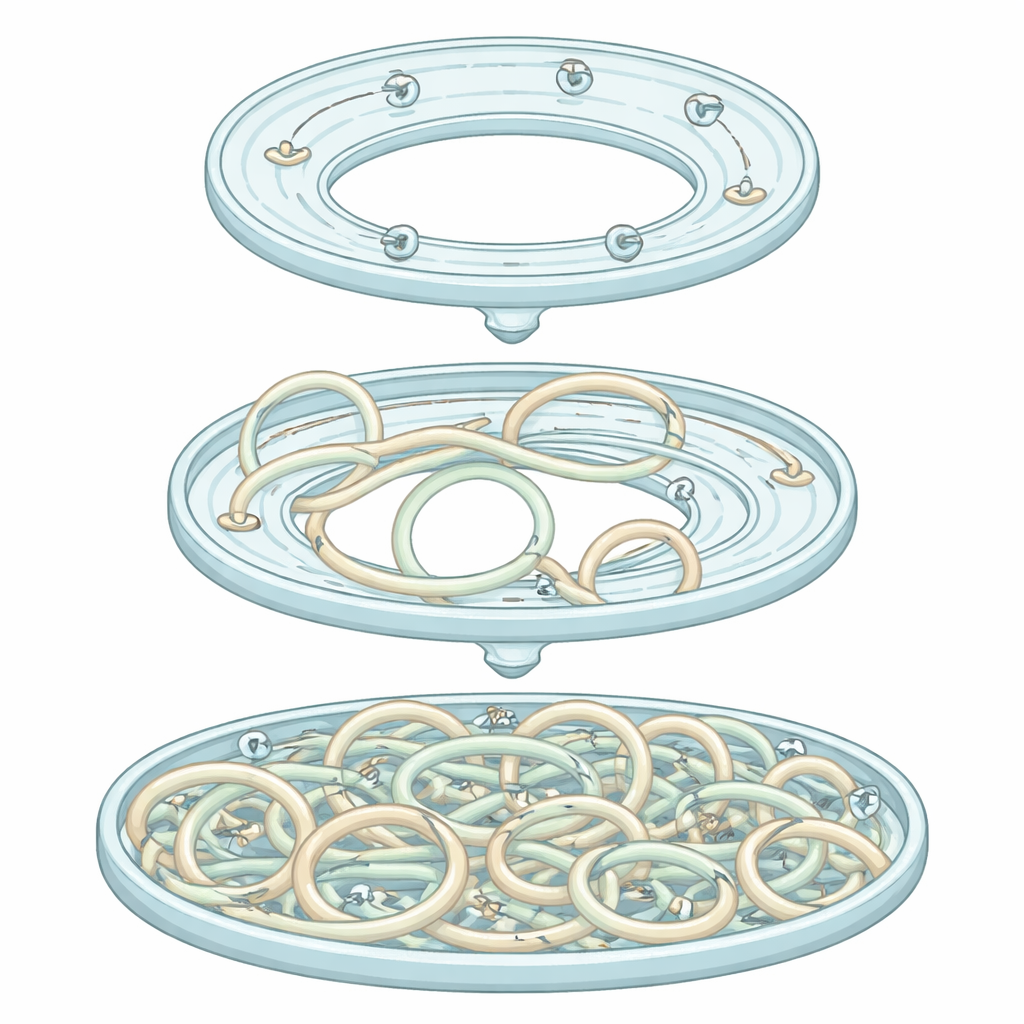
Giratórios em um labirinto macio
Os pesquisadores construíram um modelo de bancada desses nadadores usando pequenos robôs comerciais Hexbug como substitutos das partículas Brownianas ativas quirais — objetos que tanto avançam quanto naturalmente giram, descrevendo trajetórias circulares. Esses robôs foram confinados a uma pista em forma de anel e rodeados por finos aros de aço que podiam dobrar e deslizar quando atingidos. Ajustando o número de aros colocados dentro do canal, a equipe pôde regular suavemente o quão congestionado e convoluto o ambiente era, desde quase vazio até tão lotado que o movimento quase cessava. Em seguida, acompanharam as posições dos robôs ao longo do tempo para medir com que rapidez eles se dispersavam ao redor do anel.
Quando mais entulho significa espalhar mais rápido
A princípio, pode-se esperar que mais obstáculos sempre retardem os robôs. Em vez disso, a difusão medida — a taxa com que os robôs se espalham pelo canal — exibiu um padrão marcadamente não monótono. Sem aros, os robôs basicamente circulavam no mesmo lugar, de modo que sua dispersão líquida era modesta. À medida que o número de aros flexíveis aumentou até um nível moderado, os robôs colidiam com eles de maneira exatamente adequada: os aros se deslocavam e gentilmente “guiavam” os robôs para trajetórias mais retas e persistentes que percorriam longas distâncias ao longo do canal. Nesse regime, a difusão efetiva disparou, em alguns casos chegando a cerca de 100 vezes o valor observado sem obstáculos. Mas quando a área ocupada por aros tornou-se muito grande, o ambiente ficou tão congestionado que os robôs foram repetidamente bloqueados e eventualmentee quase imobilizados; então sua difusão caiu novamente em direção a zero. 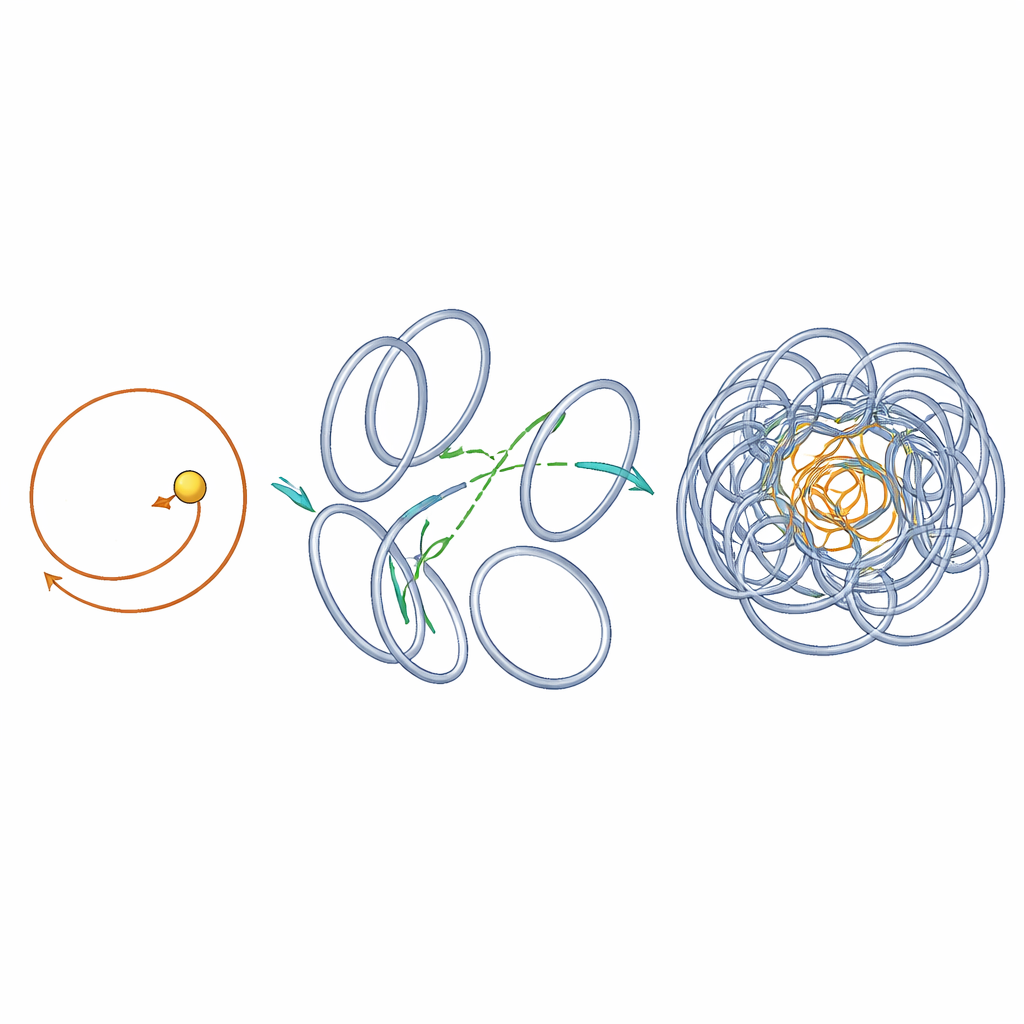
Laços presos e longas jornadas
Para explicar esse comportamento de subida e queda, os autores identificaram dois modos principais de movimento. Em um estado “preso”, um robô empurra os aros próximos apenas o suficiente para esculpir uma espécie de gaiola frouxa e então circula dentro dela, percorrendo pouco espaço. Em um estado de “migração”, colisões repetidas de raspão com os aros reorientam sucessivamente o robô de modo que sua trajetória circular natural se endireita em uma rota longa, em forma de corredor. Usando uma ferramenta estatística que acompanha quanto tempo um robô permanece dentro de uma certa janela angular, a equipe mostrou que o sistema se comporta como uma mistura de laços lentos e localizados e jornadas rápidas e dirigidas. À medida que a densidade de obstáculos aumenta, os robôs passam mais tempo migrando, mas sua velocidade para frente é gradualmente reduzida pela obstrução constante. A taxa de difusão é, portanto, determinada por uma disputa entre quanto tempo eles migram e quão rápido conseguem se mover enquanto o fazem.
Como tamanho e giro mudam o resultado
Nem todos os robôs se beneficiaram igualmente do labirinto macio. Aqueles com órbitas circulares menores, que por si só são menos difusivos, experimentaram o maior aumento relativo na dispersão quando obstáculos foram adicionados. Robôs de órbita maior já vagueiam de forma mais eficaz em espaço livre, de modo que o mesmo nível de orientação pelos obstáculos lhes confere uma vantagem menor. O estudo também mostrou que a densidade de obstáculos que produz a dispersão ótima desloca-se com o tamanho da órbita: robôs que descrevem círculos maiores atingem sua difusão máxima em densidades de obstáculos mais baixas, porque colidem com mais aros por volta e são reorientados com maior frequência.
O que isso significa para matéria ativa no mundo real
Em termos simples, o trabalho revela que um ambiente macio e reconfigurável pode transformar um movimento circular autopropelido em transporte eficiente de longa distância — até certo ponto. Obstáculos flexíveis agem como barreiras de trânsito ajustáveis: em densidades moderadas, canalizam giradores errantes em faixas rápidas; quando superlotados, criam engarrafamentos que interrompem o movimento. Essas percepções ajudam a explicar como micronadadores quirais podem navegar por paisagens naturais complexas e sugerem regras de projeto para guiar microrrobôs artificiais através de tecidos ou materiais porosos, ajustando cuidadosamente tanto seu comportamento circular intrínseco quanto a flexibilidade e a densidade do ambiente ao redor.
Citação: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
Palavras-chave: matéria ativa, micronadadores, partículas quirais, difusão, meios complexos