Clear Sky Science · sv
Ovanlig diffusion hos chirala aktiva Browniska partiklar i formbara och förflyttningsbara medier
Varför små snurrande robotar spelar roll
Föreställ dig ett svärmande av små, snurrande robotar som försöker ta sig genom en labyrint som inte består av stela väggar utan av mjuka, böjliga ringar som kan flyttas åt sidan. Hur väl de sprider sig genom denna labyrint visar sig vara överraskande viktigt för att förstå hur verkliga mikroskopiska simmare—som bakterier eller medicinska mikrorobotar—rör sig i trånga miljöer som jord, geléer eller levande vävnad. Denna studie undersöker hur den inbyggda cirkulära rörelsen hos dessa ”chirala” rörelseenheter samverkar med flexibla hinder och ger ett oväntat resultat: i vissa fall kan fler hinder faktiskt få dem att sprida sig snabbare. 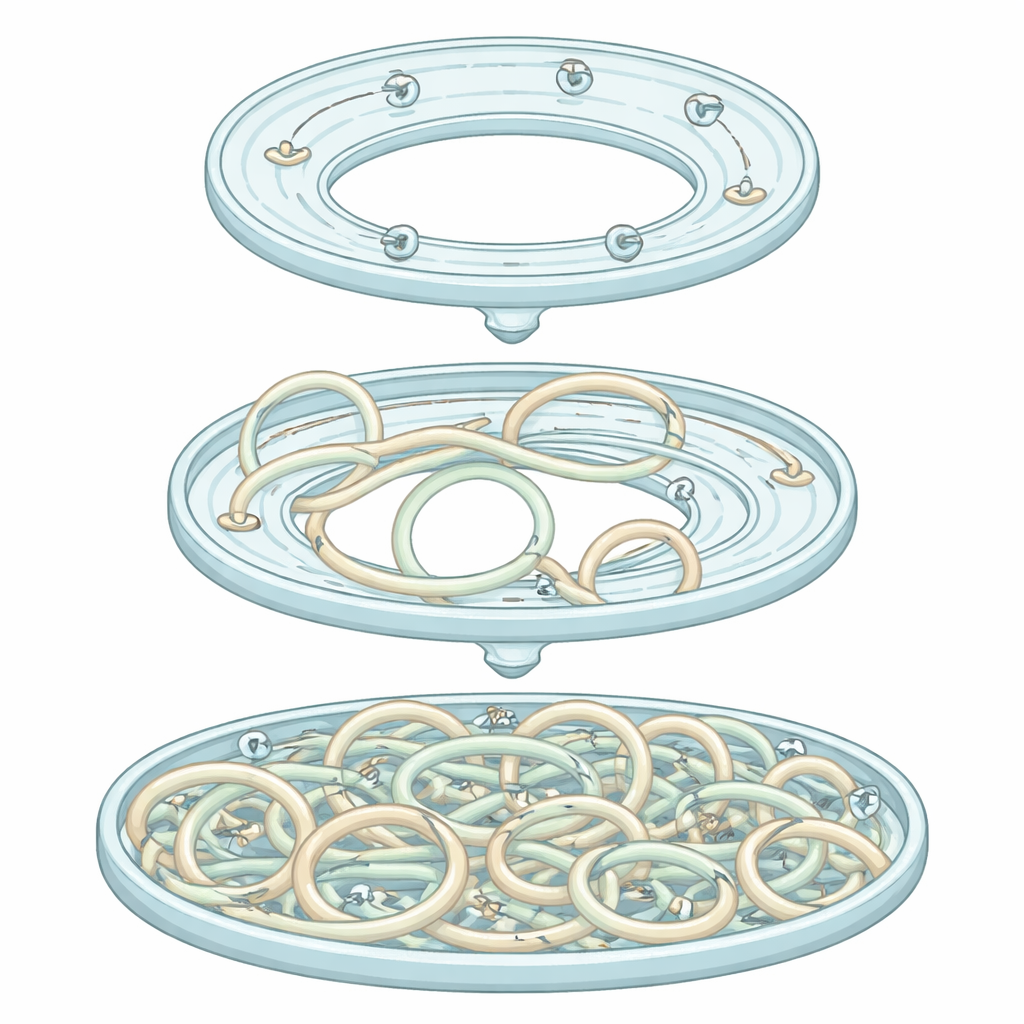
Snurror i en mjuk labyrint
Forskarna byggde en bordsmodell av sådana simmare med små kommersiella Hexbug-robotar som representanter för chirala aktiva Browniska partiklar—objekt som både skjuter framåt och naturligt svänger och därmed beskriver cirkulära banor. Robotarna var begränsade till ett ringformat spår och omgivna av tunna stålförsedda ringar som kunde böjas och glida när de träffades. Genom att justera hur många ringar de placerade i kanalen kunde teamet kontinuerligt ställa in hur trångt och slingrigt miljön var, från nästan tomt till så packat att rörelsen nästan upphörde. De följde sedan robotarnas positioner över tiden för att mäta hur snabbt de rörde sig runt ringen.
När mer stök ger snabbare spridning
Vid första anblick kan man tro att fler hinder alltid skulle sakta ner robotarna. Istället visade den uppmätta diffusionen—hastigheten med vilken robotarna sprider sig runt kanalen—ett slående icke-monotont mönster. Utan ringar cirklade robotarna mest på stället, så deras netto-spridning var måttlig. När antalet mjuka ringar ökade till en måttlig nivå krockade robotarna med dem på precis rätt sätt: de flexibla ringarna försköts och ”styrde” robotarna svagt in i rakare, mer uthålliga banor som sträckte sig långa sträckor längs kanalen. I detta regime ökade deras effektiva diffusion kraftigt, i vissa fall med nästan en faktor 100 jämfört med fallet utan hinder. Men när ringytan blev mycket stor blev miljön så trång att robotarna upprepade gånger blockerades och till sist nästan immobiliserades; deras diffusion sjönk då tillbaka mot noll. 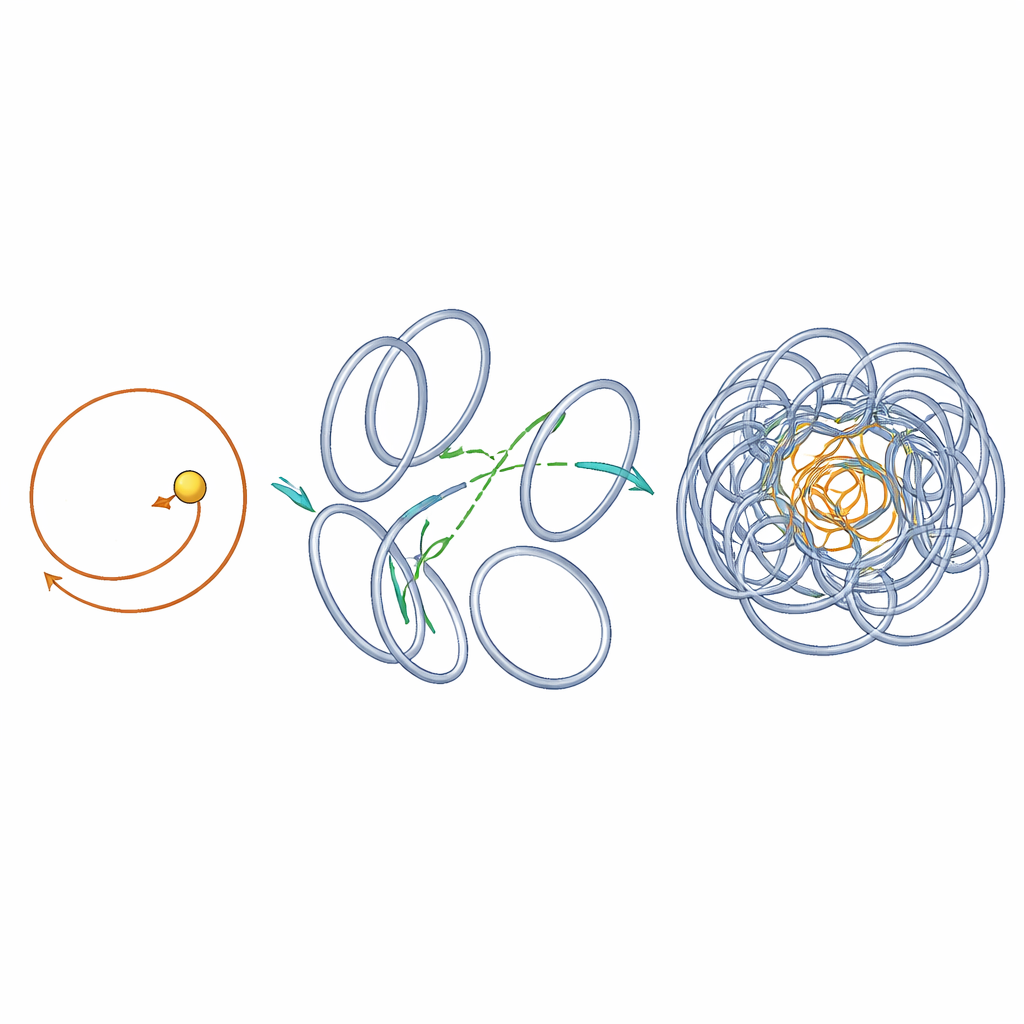
Fångade loopar och långa resor
För att förstå detta upp-och-ner-beteende identifierade författarna två huvudlägen för rörelse. I ett ”fångat” tillstånd trycker en robot undan närliggande ringar så att den skapar ett löst bur-liknande utrymme och sedan cirklar inuti det, och tillryggalägger därmed liten mark. I ett ”migrerande” tillstånd omorienterar upprepade snabba stötar mot ringarna successivt roboten så att dess naturliga cirkelbana rätas ut till en lång, korridorliknande färd. Med ett statistiskt verktyg som följer hur länge en robot stannar inom ett visst vinkelintervall visade teamet att systemet beter sig som en blandning av långsamma, lokala loopar och snabba, riktade resor. När hinder-tätheten ökar tillbringar robotarna mer tid i migrering, men deras framåthastighet minskar gradvis på grund av konstant blockering. Diffusionshastigheten bestäms därför av en dragkamp mellan hur länge de migrerar och hur snabbt de kan röra sig under dessa förhållanden.
Hur storlek och rotation förändrar utfallet
Alla robotar tjänade inte lika mycket på den mjuka labyrinten. De med mindre cirkulära banor, som på egen hand är mindre diffusa, upplevde den största relativa ökningen i spridning när hinder tillsattes. Robotar med större banor vandrar redan mer effektivt i fritt utrymme, så samma nivå av styrning från hindren ger dem en mindre fördel. Studien visade också att den hinder-täthet som ger optimal spridning skiftar med banstorleken: robotar som sveper ut större cirklar når sin högsta diffusion vid lägre hinder-tätheter, eftersom de kolliderar med fler ringar per varv och omorienteras oftare.
Vad detta betyder för aktivt materia i verkliga världen
Enkelt uttryckt visar arbetet att en mjuk, omkonfigurerbar miljö kan omvandla cirkulär, självdriven rörelse till effektiv transport över långa avstånd—upp till en viss gräns. Flexibla hinder fungerar som justerbara trafikbarriärer: vid måttliga densiteter leder de kringvandrande snurrorna in i expressfiler; när det blir överfullt skapas trafikstockningar som stoppar rörelsen. Dessa insikter hjälper till att förklara hur chirala mikrosimmare kan navigera komplexa naturlandskap och antyder designregler för att styra artificiella mikrorobotar genom vävnader eller porösa material genom att noggrant stämma av både deras inneboende cirklande beteende och omgivningens flexibilitet och densitet.
Citering: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
Nyckelord: aktivt materia, mikrosimmare, chirala partiklar, diffusion, komplexa medier