Clear Sky Science · fr
Diffusion inhabituelle de particules browniennes actives chirales dans des milieux déformables et déplaçables
Pourquoi de minuscules robots tournants comptent
Imaginez une nuée de tout petits robots tournants qui tentent de se frayer un chemin à travers un labyrinthe fait non pas de murs rigides, mais d’anneaux souples et flexibles pouvant se décaler. La manière dont ils se dispersent dans ce labyrinthe s’avère étonnamment importante pour comprendre comment de véritables nageurs microscopiques — comme des bactéries ou des microrobots médicaux — se déplacent dans des environnements encombrés tels que le sol, les gels ou les tissus vivants. Cette étude examine comment le mouvement circulaire intrinsèque de ces acteurs « chiraux » se combine avec des obstacles flexibles pour produire un résultat inattendu : dans certains cas, ajouter des obstacles peut en réalité accélérer leur dispersion. 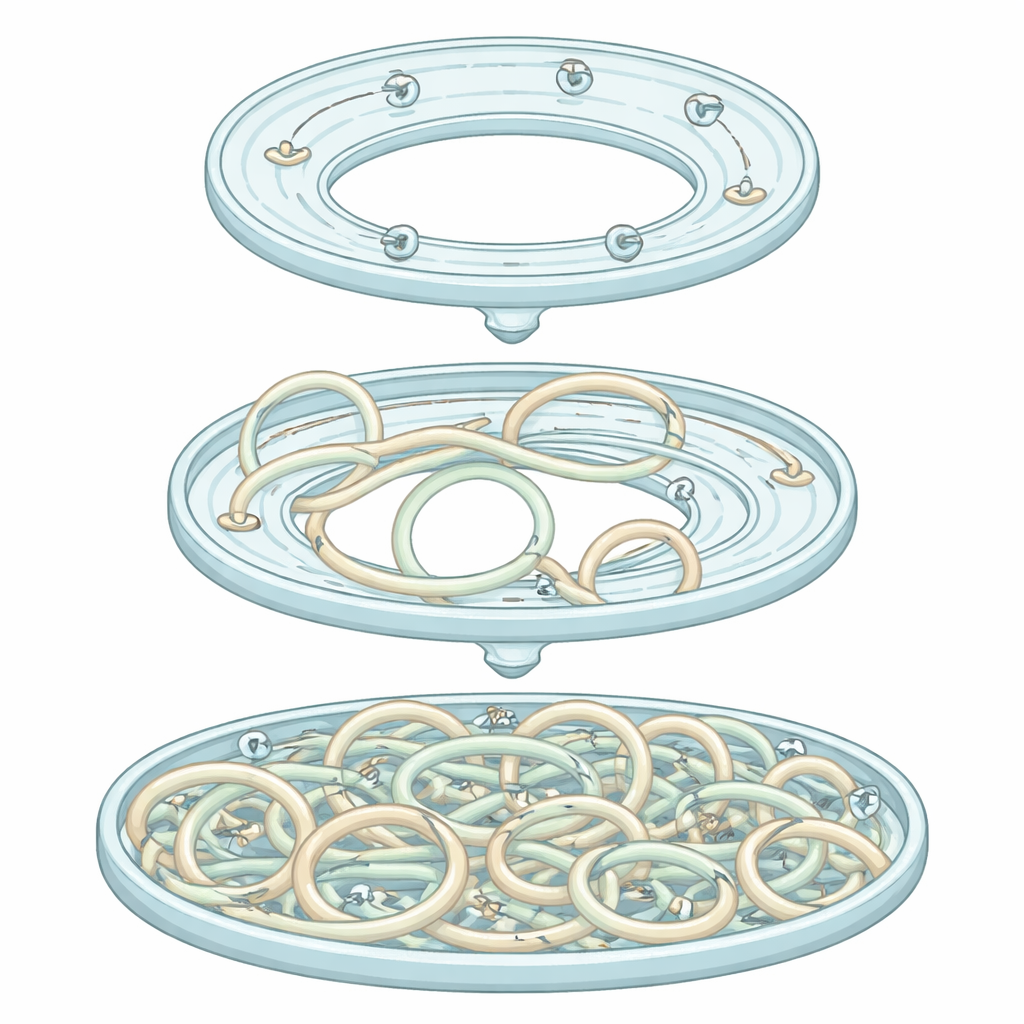
Des tourneurs dans un labyrinthe mou
Les chercheurs ont construit un modèle de table de ces nageurs en utilisant de petits robots Hexbug commerciaux comme substituts de particules browniennes actives chirales — des objets qui avancent tout en tournant naturellement, décrivant des trajectoires circulaires. Ces robots étaient confinés dans une piste annulaire et entourés d’anneaux en acier fins capables de fléchir et de glisser lorsqu’on les heurtait. En ajustant le nombre d’anneaux placés à l’intérieur du canal, l’équipe a pu moduler en douceur le degré d’encombrement et de complexité de l’environnement, depuis presque vide jusqu’à si compact que le mouvement en était presque stoppé. Ils ont ensuite suivi les positions des robots au fil du temps pour mesurer à quelle vitesse ils se dispersaient autour de l’anneau.
Quand davantage d’encombrement rime avec dispersion plus rapide
À première vue, on pourrait s’attendre à ce que plus d’obstacles ralentissent toujours les robots. Au lieu de cela, la diffusion mesurée — le taux auquel les robots se répartissent dans le canal — a montré un profil non monotone saisissant. Sans anneaux, les robots faisaient surtout du surplace circulaire, si bien que leur dispersion nette restait modeste. À mesure que le nombre d’anneaux souples augmentait jusqu’à un niveau modéré, les robots les heurtaient d’une façon favorable : les anneaux flexibles se déplaçaient et « dirigeaient » doucement les robots vers des trajectoires plus droites et plus persistantes, qui parcouraient de longues distances le long du canal. Dans ce régime, leur diffusion effective bondissait, parfois d’un facteur proche de 100 par rapport au cas sans obstacles. Mais lorsque la surface occupée par les anneaux devenait très importante, l’environnement devenait si encombré que les robots se trouvaient à maintes reprises bloqués et finissaient presque immobilisés ; leur diffusion retombait alors vers zéro. 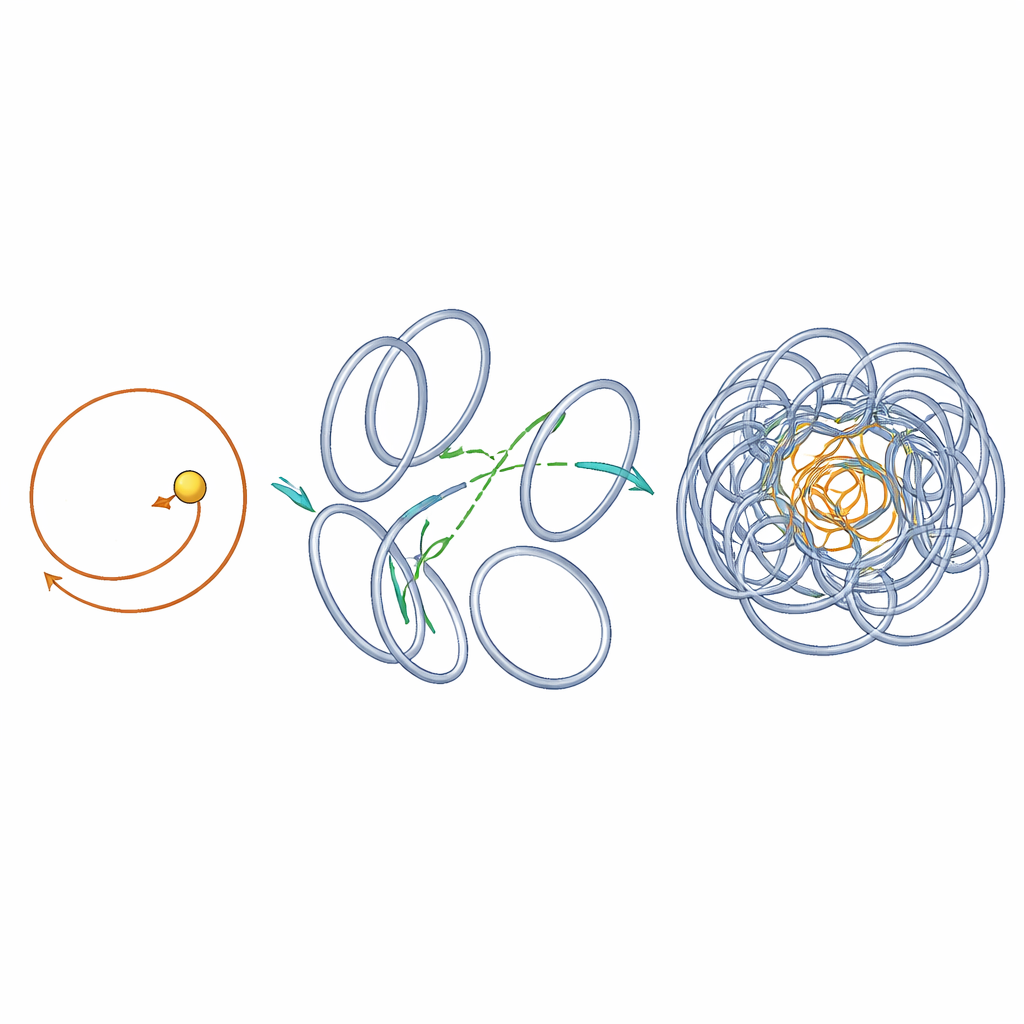
Boucles piégées et longs trajets
Pour éclairer ce comportement en montée et en descente, les auteurs ont identifié deux grands modes de déplacement. Dans un état « piégé », un robot pousse suffisamment les anneaux voisins pour se tailler une cage lâche et tourne ensuite à l’intérieur, couvrant peu de terrain. Dans un état « migrateur », des collisions successives et tangentielles avec les anneaux réorientent progressivement le robot, de sorte que sa trajectoire circulaire naturelle se redresse en un itinéraire long et en corridor. En utilisant un outil statistique qui suit combien de temps un robot reste dans une fenêtre angulaire donnée, l’équipe a montré que le système se comporte comme un mélange de boucles lentes et localisées et de voyages rapides et dirigés. À mesure que la densité d’obstacles augmente, les robots passent plus de temps à migrer, mais leur vitesse d’avancement est progressivement réduite par les obstructions constantes. Le taux de diffusion est donc déterminé par une lutte entre la durée des migrations et la vitesse qu’ils peuvent maintenir pendant celles-ci.
Comment la taille et la rotation modifient le résultat
Tous les robots n’ont pas tiré le même bénéfice du labyrinthe souple. Ceux dont les orbites circulaires sont plus petites — donc moins diffusifs par défaut — ont connu le gain relatif le plus important en dispersion lorsque des obstacles ont été ajoutés. Les robots aux orbites plus larges vagabondent déjà plus efficacement en espace libre, si bien que le même niveau de guidage par les obstacles leur apporte un avantage moindre. L’étude montre aussi que la densité d’obstacles produisant la dispersion optimale dépend de la taille de l’orbite : les robots qui balaient des cercles plus grands atteignent leur diffusion maximale à des densités d’obstacles plus faibles, car ils heurtent davantage d’anneaux par tour et sont réorientés plus fréquemment.
Ce que cela signifie pour la matière active du monde réel
En termes simples, ce travail révèle qu’un environnement souple et reconfigurable peut convertir un mouvement circulaire auto-propulsé en transport efficace à longue distance — jusqu’à un certain point. Les obstacles flexibles agissent comme des barrières de circulation ajustables : à des densités modérées, ils canalisent les tourneurs errants vers des voies rapides ; lorsqu’ils deviennent trop nombreux, ils créent des embouteillages qui arrêtent le mouvement. Ces perspectives contribuent à expliquer comment des micronageurs chiraux pourraient se frayer un chemin à travers des paysages naturels complexes et suggèrent des règles de conception pour guider des microrobots artificiels à travers les tissus ou des matériaux poreux en ajustant finement à la fois leur comportement de circulation intrinsèque et la flexibilité et la densité de leur environnement.
Citation: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
Mots-clés: matière active, micronageurs, particules chirales, diffusion, milieux complexes