Clear Sky Science · es
Difusión inusual de partículas activas brownianas quiral en medios deformables y desplazables
Por qué importan los pequeños robots giratorios
Imagínese un enjambre de diminutos robots giratorios que intentan moverse a través de un laberinto hecho no de paredes rígidas, sino de aros blandos y flexibles que pueden desplazarse para abrir paso. La manera en que se dispersan por este laberinto resulta sorprendentemente importante para entender cómo viajan en la práctica los nadadores microscópicos —como bacterias o microrobots médicos— a través de lugares congestionados como el suelo, los geles o el tejido vivo. Este estudio explora cómo el movimiento circular inherente de estos agentes “quirales” se combina con obstáculos flexibles para producir un resultado inesperado: en algunos casos, añadir más obstáculos puede, en realidad, hacer que se dispersen más rápido. 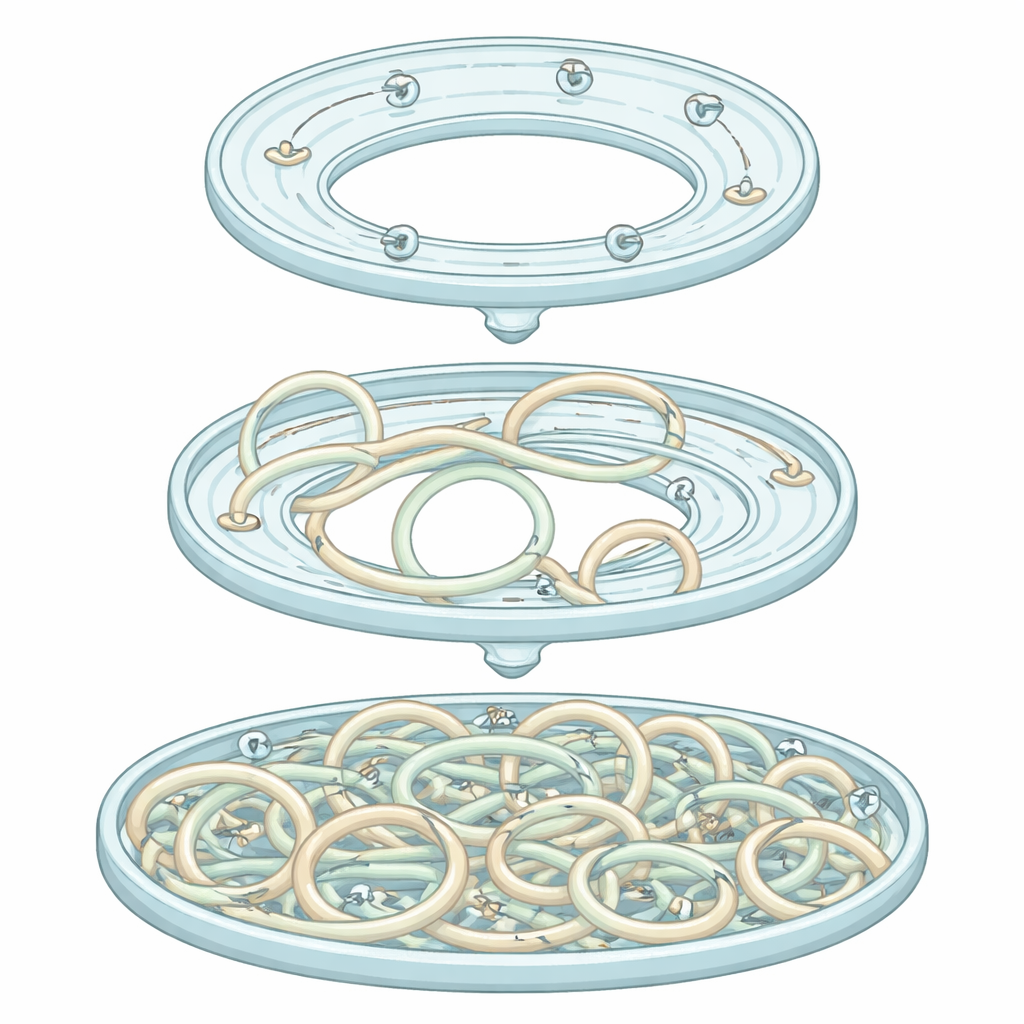
Giros en un laberinto blando
Los investigadores construyeron un modelo de sobremesa de tales nadadores usando pequeños robots comerciales Hexbug como sustitutos de las partículas activas brownianas quirales —objetos que se desplazan hacia adelante y, de forma natural, giran describiendo trayectorias circulares. Estos robots fueron confinados a una pista en forma de anillo y rodeados por delgados aros de acero que pueden doblarse y deslizarse al ser golpeados. Al ajustar cuántos aros colocaban dentro del canal, el equipo pudo controlar de forma continua cuánto de concurrido y enrevesado era el entorno, desde casi vacío hasta tan lleno que el movimiento se detenía casi por completo. Luego siguieron las posiciones de los robots en el tiempo para medir con qué rapidez se desplazaban alrededor del anillo.
Cuando más desorden significa mayor dispersión
A primera vista, uno podría esperar que más obstáculos siempre frenaran a los robots. En cambio, la difusión medida —la tasa a la que los robots se dispersan por el canal— mostró un patrón marcadamente no monótono. Sin aros, los robots mayormente daban vueltas en el mismo lugar, por lo que su dispersión neta era modesta. A medida que el número de aros flexibles aumentó hasta un nivel moderado, los robots colisionaban con ellos de la manera justa: los aros flexibles se desplazaban y «encaminaban» suavemente a los robots hacia trayectorias más rectas y persistentes que recorrían largas distancias a lo largo del canal. En ese régimen, su difusión efectiva aumentó drásticamente, en algunos casos casi en un factor de 100 respecto al caso sin obstáculos. Pero cuando el área ocupada por aros se volvió muy grande, el entorno se hizo tan congestionado que los robots quedaban bloqueados repetidamente y acababan casi inmovilizados; su difusión entonces descendió de nuevo hacia cero. 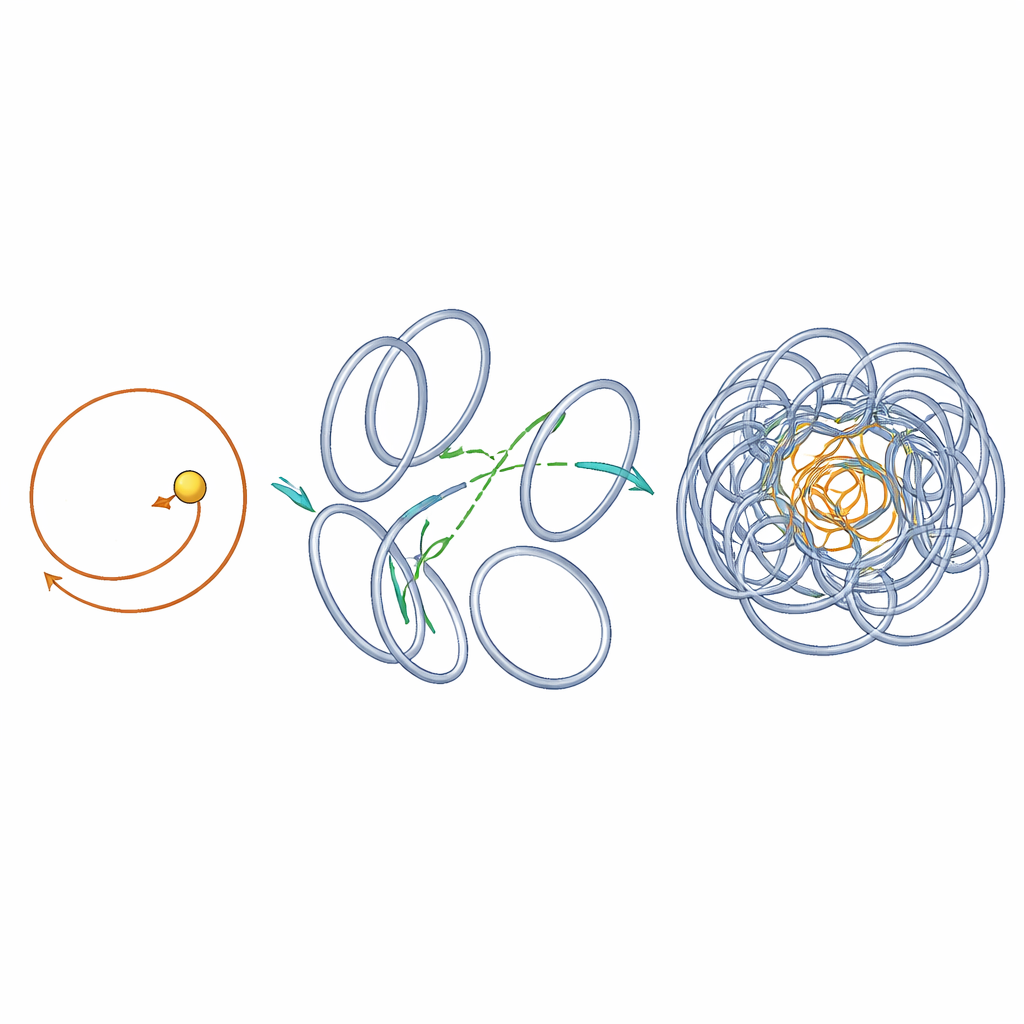
Boucles atrapadas y largos viajes
Para entender este comportamiento de subida y bajada, los autores identificaron dos modos principales de movimiento. En un estado «atrapado», un robot empuja a los aros cercanos lo justo para labrar una jaula laxa y luego gira dentro de ella, cubriendo poco terreno. En un estado «migratorio», colisiones sucesivas y de rebote con los aros reorientan al robot de modo que su trayectoria circular natural se endereza en una ruta larga, similar a un corredor. Usando una herramienta estadística que rastrea cuánto tiempo permanece un robot dentro de una cierta ventana angular, el equipo mostró que el sistema se comporta como una mezcla de bucles lentos y localizados y viajes rápidos y dirigidos. Al aumentar la densidad de obstáculos, los robots pasan más tiempo migrando, pero su velocidad hacia adelante se reduce gradualmente por la obstrucción constante. La tasa de difusión queda, por tanto, determinada por un tira y afloja entre cuánto tiempo migran y qué rapidez pueden mantener mientras lo hacen.
Cómo el tamaño y el giro alteran el resultado
No todos los robots se beneficiaron por igual del laberinto blando. Aquellos con órbitas circulares más pequeñas, que por sí mismas son menos difusivas, experimentaron el mayor aumento relativo en dispersión cuando se añadieron obstáculos. Los robots de órbitas más grandes ya se desplazan con mayor eficacia en el espacio libre, por lo que el mismo nivel de dirección impuesto por los obstáculos les aporta una ventaja menor. El estudio también mostró que la densidad de obstáculos que produce la dispersión óptima cambia con el tamaño de la órbita: los robots que describen círculos más grandes alcanzan su difusión máxima a densidades de obstáculos más bajas, porque colisionan con más aros por vuelta y se reorientan con mayor frecuencia.
Qué significa esto para la materia activa en el mundo real
En términos sencillos, el trabajo revela que un entorno blando y reconfigurable puede convertir un movimiento circular autopropulsado en un transporte eficiente a larga distancia —hasta cierto punto. Los obstáculos flexibles actúan como barreras de tráfico ajustables: a densidades moderadas, canalizan a los giradores errantes hacia carriles exprés; cuando hay sobrecarga, crean atascos que detienen el movimiento. Estas ideas ayudan a explicar cómo los micronadadores quirales podrían navegar paisajes naturales complejos y sugieren reglas de diseño para guiar microrobots artificiales a través de tejidos o materiales porosos ajustando cuidadosamente tanto su comportamiento circular intrínseco como la flexibilidad y densidad de su entorno.
Cita: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
Palabras clave: materia activa, micronadadores, partículas quirales, difusión, medios complejos