Clear Sky Science · de
Ungewöhnliche Diffusion chiraler aktiver Brownscher Teilchen in verformbaren und verschiebbaren Medien
Warum winzige rotierende Roboter wichtig sind
Stellen Sie sich einen Schwarm winziger, rotierender Roboter vor, die versuchen, sich durch ein Labyrinth zu bewegen, das nicht aus starren Wänden, sondern aus weichen, biegbaren Ringen besteht, die sich zur Seite schieben lassen. Wie gut sie sich in diesem Labyrinth ausbreiten, ist überraschend wichtig, um zu verstehen, wie echte mikroskopische Schwimmer – etwa Bakterien oder medizinische Mikroroboter – sich durch überfüllte Umgebungen wie Boden, Gele oder lebendes Gewebe bewegen. Diese Studie untersucht, wie die eingebaute Kreisbewegung dieser „chiralen“ Fortbewegenden mit flexiblen Hindernissen kombiniert wird und zu einem unerwarteten Ergebnis führt: In manchen Fällen kann das Hinzufügen weiterer Hindernisse ihre Ausbreitung sogar beschleunigen. 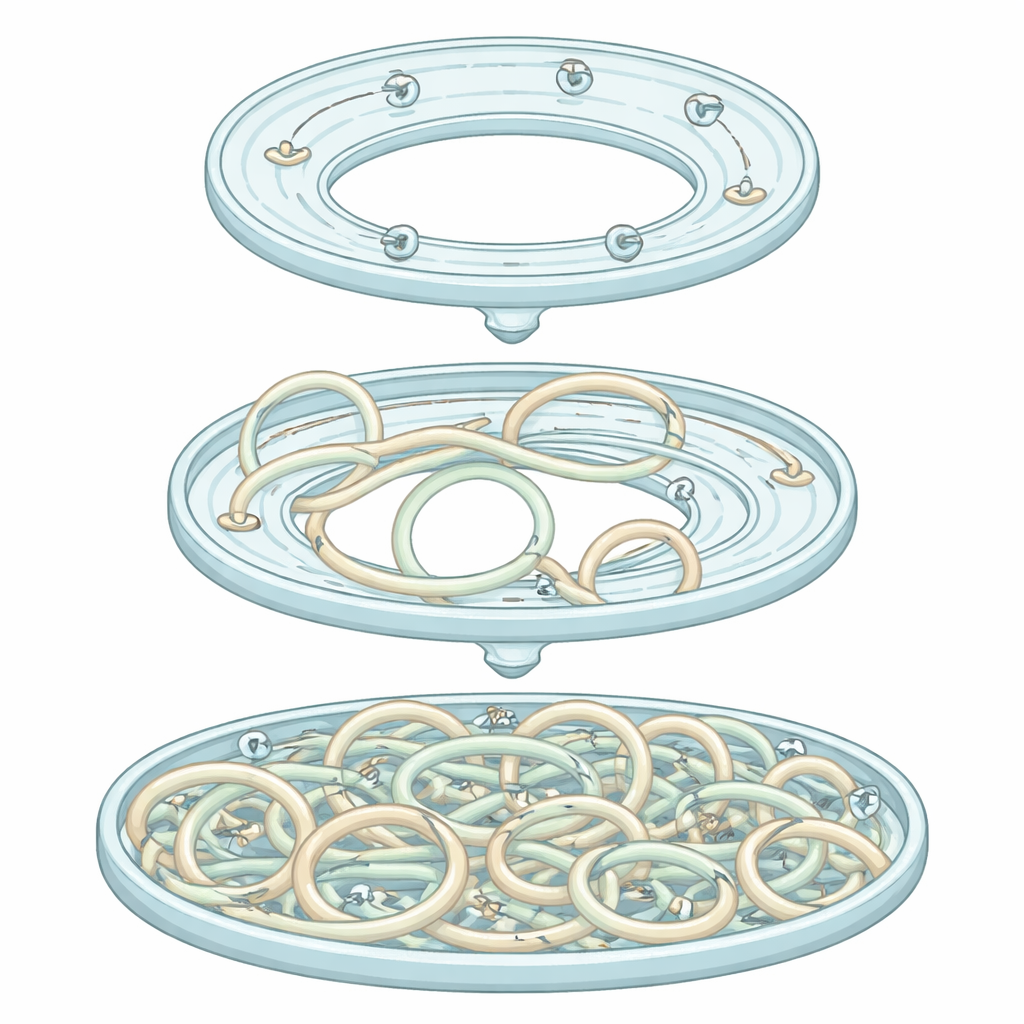
Rotierer im weichen Labyrinth
Die Forschenden bauten ein Tisch-Experiment dieser Schwimmer, indem sie kleine handelsübliche Hexbug-Roboter als Stellvertreter für chirale aktive brownsche Teilchen verwendeten – Objekte, die sich vorwärts bewegen und gleichzeitig natürlich abbiegen, sodass sie kreisförmige Bahnen beschreiben. Diese Roboter wurden auf eine ringförmige Spur beschränkt und von dünnen Stahlringen umgeben, die sich beim Auftreffen biegen und verschieben konnten. Durch Variieren der Anzahl der Ringe innerhalb des Kanals konnte das Team die Enge und Verschlungenheit der Umgebung stufenlos einstellen, von nahezu leer bis so dicht, dass die Bewegung fast zum Stillstand kam. Anschließend verfolgten sie die Positionen der Roboter über die Zeit, um zu messen, wie schnell sie sich entlang des Rings ausbreiteten.
Wenn mehr Unordnung schnellere Ausbreitung bedeutet
Auf den ersten Blick könnte man erwarten, dass mehr Hindernisse die Roboter immer bremsen. Stattdessen zeigte die gemessene Diffusion – die Rate, mit der sich die Roboter im Kanal ausbreiten – ein auffälliges nichtmonotones Muster. Ohne Ringe umrundeten die Roboter meist nur ihre Kreisbahnen, sodass ihre Netto-Ausbreitung gering war. Mit einer moderaten Anzahl weicher Ringe stießen die Roboter in genau der richtigen Weise dagegen: Die flexiblen Ringe verschoben sich und „lenkten“ die Roboter sachte in geradlinigere, dauerhaftere Bahnen, die sich über weite Strecken entlang des Kanals erstreckten. In diesem Bereich stieg ihre effektive Diffusion sprunghaft an, in manchen Fällen um fast den Faktor 100 gegenüber dem hindernisfreien Fall. Wurde die Ringfläche jedoch sehr groß, wurde die Umgebung so überfüllt, dass die Roboter wiederholt blockiert und schließlich nahezu bewegungsunfähig wurden; ihre Diffusion fiel dann zurück gegen Null. 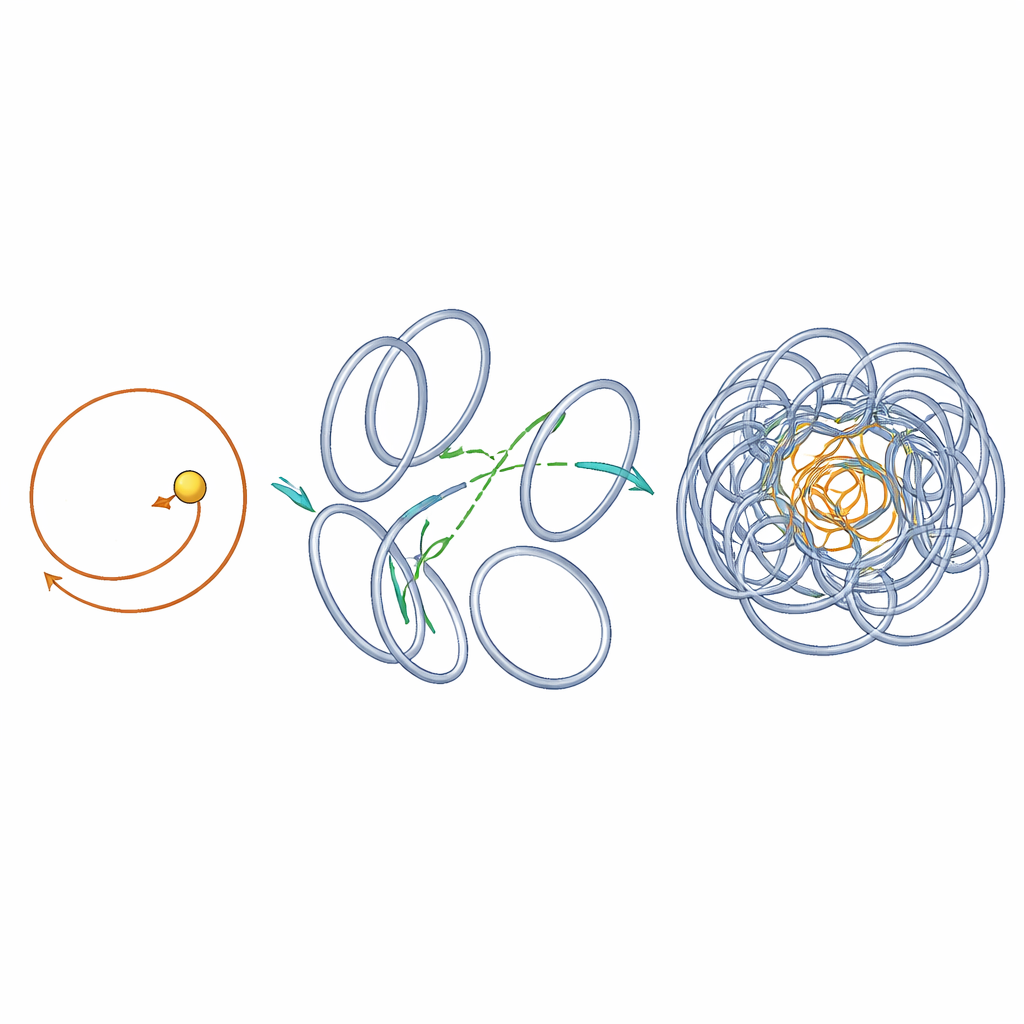
Gefangene Schleifen und lange Reisen
Um dieses Auf- und Ab-Verhalten zu erklären, identifizierten die Autorinnen und Autoren zwei Hauptbewegungsmodi. In einem „gefangenen“ Zustand schiebt ein Roboter nahe Ringe gerade so weit zur Seite, dass er eine lose Käfigstruktur schafft und dann darin kreist, wodurch er kaum Strecke macht. Im „migratorischen“ Zustand hingegen richten wiederholte, flüchtige Kollisionen mit Ringen den Roboter sukzessive so aus, dass seine natürliche Kreisbahn sich zu einer langen, koridorähnlichen Route streckt. Mithilfe eines statistischen Werkzeugs, das misst, wie lange ein Roboter innerhalb eines bestimmten Winkelbereichs bleibt, zeigte das Team, dass das System wie eine Mischung aus langsamen, lokalisierten Schleifen und schnellen, gerichteten Reisen funktioniert. Mit steigender Hindernisdichte verbringen die Roboter mehr Zeit mit Migrieren, doch ihre Vorwärtsgeschwindigkeit wird durch ständige Behinderung schrittweise reduziert. Die Diffusionsrate ergibt sich daher aus einem Tauziehen zwischen der Dauer der Migrationsphasen und der Geschwindigkeit, mit der sie sich dabei fortbewegen können.
Wie Größe und Drehung das Ergebnis ändern
Nicht alle Roboter profitierten gleichermaßen vom weichen Labyrinth. Die mit kleineren Kreisbahnen, die allein weniger diffusiv sind, erfuhren den größten relativen Zuwachs in der Ausbreitung bei Hinzufügung von Hindernissen. Roboter mit größeren Bahnen wandern bereits im freien Raum effektiver, sodass derselbe Lenkeffekt durch Hindernisse ihnen einen geringeren Vorteil verschafft. Die Studie zeigte außerdem, dass sich die Hindernisdichte, die die optimale Ausbreitung erzeugt, mit der Bahngröße verschiebt: Roboter, die größere Kreise beschreiben, erreichen ihr Diffusionsmaximum bei geringerer Hindernisdichte, weil sie pro Umdrehung mehr Ringe treffen und häufiger umgelenkt werden.
Was das für reale aktive Materie bedeutet
Einfach gesagt zeigt die Arbeit, dass eine weiche, rekonfigurierbare Umgebung kreisförmige, selbstangetriebene Bewegung bis zu einem gewissen Grad in effizienten Langstreckentransport verwandeln kann. Flexible Hindernisse wirken wie verstellbare Verkehrssperren: Bei mittlerer Dichte kanalisieren sie umherschwirrende Rotierer in Schnellspuren; bei Überfüllung verursachen sie Staus, die die Bewegung zum Erliegen bringen. Diese Erkenntnisse helfen zu erklären, wie chirale Microswimmer sich in komplexen natürlichen Landschaften orientieren könnten, und liefern Gestaltungshinweise, um künstliche Mikroroboter durch Gewebe oder poröse Materialien zu leiten, indem sowohl ihr intrinsisches Kreisverhalten als auch die Flexibilität und Dichte ihrer Umgebung sorgfältig abgestimmt werden.
Zitation: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
Schlüsselwörter: aktive Materie, Microswimmer, chirale Teilchen, Diffusion, komplexe Medien