Clear Sky Science · nl
Ongewone diffusie van chirale actieve Brownse deeltjes in vervormbare en verplaatsbare media
Waarom kleine ronddraaiende robots ertoe doen
Stel je een zwerm kleine, ronddraaiende robots voor die door een doolhof bewegen dat niet uit stijve muren bestaat, maar uit zachte, buigzame ringen die opzij kunnen schuiven. Hoe goed ze zich door dat doolhof verspreiden, blijkt verrassend belangrijk om te begrijpen hoe echte microscopische zwemmers—zoals bacteriën of medische microrobots—zich verplaatsen door drukke omgevingen zoals grond, gels of levende weefsels. Deze studie onderzoekt hoe de ingebouwde cirkelbeweging van deze “chirale” zwemmers samenwerkt met flexibele obstakels en zo een onverwacht resultaat oplevert: in sommige gevallen kan het toevoegen van meer obstakels hen juist sneller laten verspreiden. 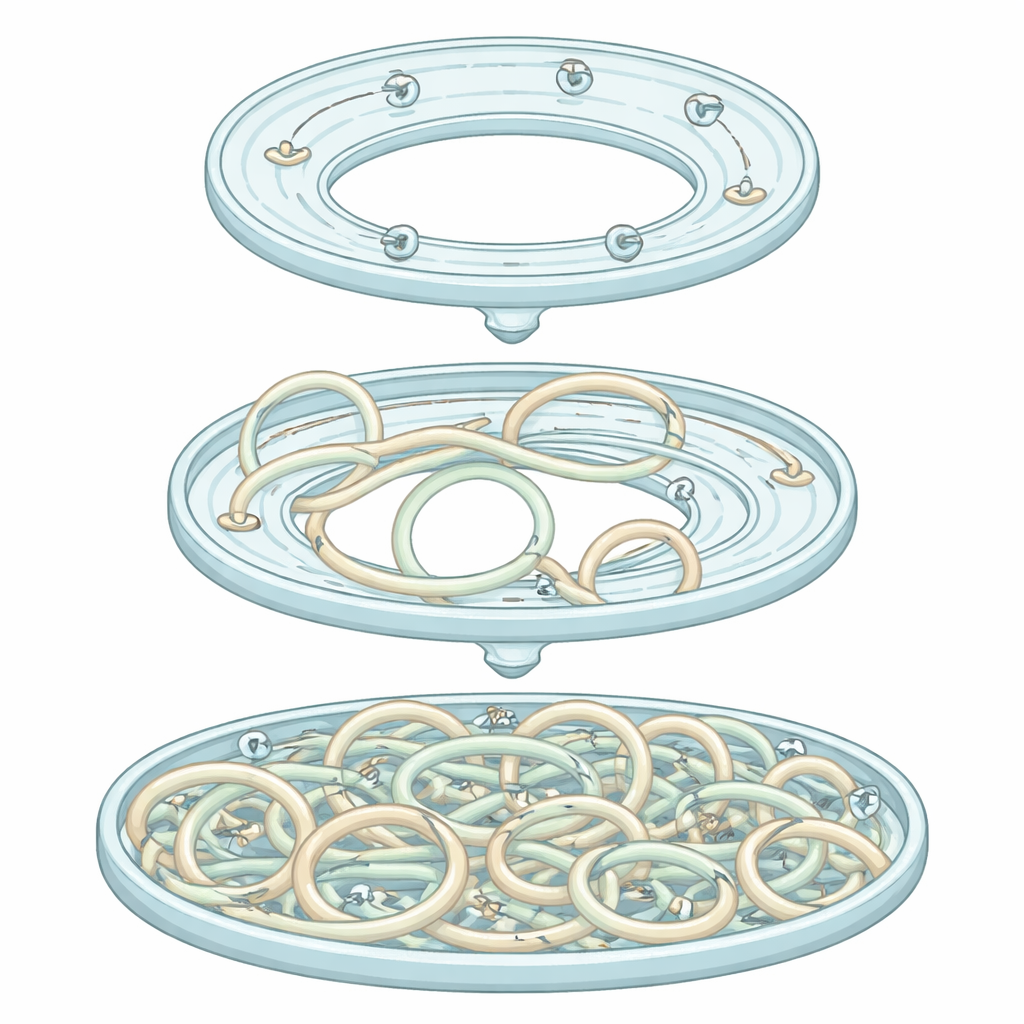
Rondzwervers in een zacht doolhof
De onderzoekers bouwden een tafelmodel van zulke zwemmers met kleine commerciële Hexbug-robots als vervangers voor chirale actieve Brownse deeltjes—objecten die zowel vooruit bewegen als van nature draaien en daardoor cirkelbanen afleggen. Deze robots werden beperkt tot een ringvormig parcours en omringd door dunne stalen ringen die konden buigen en schuiven wanneer ze werden geraakt. Door het aantal ringen in het kanaal aan te passen, kon het team de mate van drukte en kronkeligheid van de omgeving geleidelijk instellen, van bijna leeg tot zo vol dat beweging vrijwel stopte. Vervolgens volgden ze de posities van de robots in de tijd om te meten hoe snel ze zich rond de ring verplaatsten.
Wanneer meer rommel betekent sneller verspreiden
Op het eerste gezicht zou je verwachten dat meer obstakels de robots altijd zouden vertragen. In plaats daarvan vertoonde de gemeten diffusie—de snelheid waarmee robots zich rond het kanaal verspreiden—een opvallend niet-monotone trend. Zonder ringen draaiden de robots meestal ter plaatse rond, waardoor hun netto verspreiding beperkt bleef. Naarmate het aantal zachte ringen tot een matig niveau toenam, botsten de robots op precies de juiste manier: de flexibele ringen verschoven en ’stuurtten’ de robots zachtjes in rechtere, meer aanhoudende trajecten die lange afstanden langs het kanaal overspanden. In dit regime schoot hun effectieve diffusie omhoog, in sommige gevallen bijna een factor honderd vergeleken met de obstakelvrije situatie. Maar wanneer het ringoppervlak erg groot werd, raakte de omgeving zo vol dat de robots herhaaldelijk werden geblokkeerd en uiteindelijk bijna geïmmobiliseerd; hun diffusie daalde dan weer richting nul. 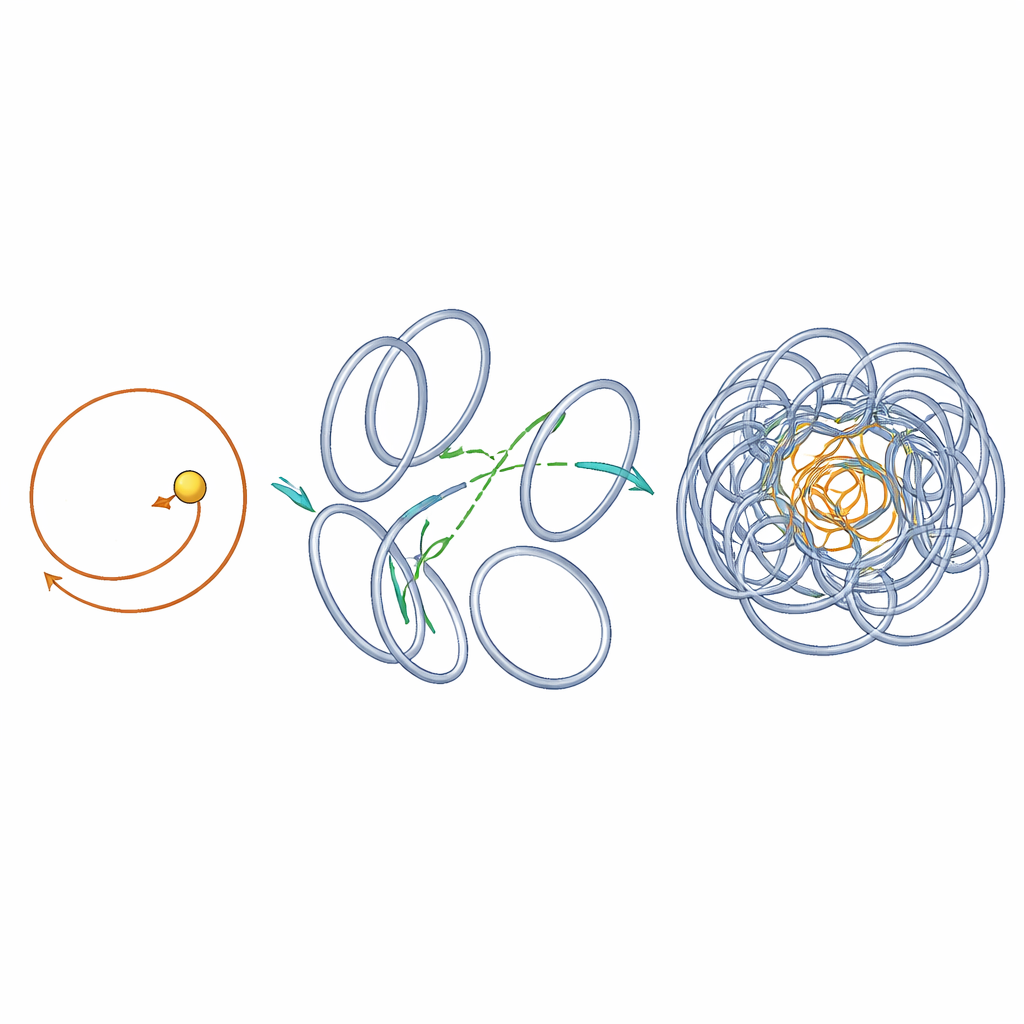
Gevangen lussen en lange reizen
Om dit op- en neergaande gedrag te verklaren, identificeerden de auteurs twee hoofdbewegingsmodi. In een “gevangen” toestand duwt een robot nabije ringen net genoeg opzij om een losse kooi uit te hollen en draait daarna binnen die kooi rond, waarbij weinig terrein wordt afgelegd. In een “migrerende” toestand zorgen herhaalde aanliggende botsingen met ringen ervoor dat de robot geleidelijk wordt heroriënteerd, zodat zijn natuurlijke cirkelpad zich uitstrekt tot een lang, gangachtig traject. Met een statistisch hulpmiddel dat bijhoudt hoe lang een robot binnen een bepaald hoekvenster blijft, toonde het team aan dat het systeem zich gedraagt als een mengsel van trage, gelokaliseerde lussen en snelle, gerichte reizen. Naarmate de obstakeldichtheid toeneemt, brengen robots meer tijd door met migreren, maar hun voortgangssnelheid wordt geleidelijk verminderd door constante obstructie. De diffusiesnelheid wordt daarmee bepaald door een trek‑touw‑wedstrijd tussen hoe lang ze migreren en hoe snel ze zich daarbij kunnen voortbewegen.
Hoe grootte en draaiing het resultaat veranderen
Niet alle robots profiteerden evenveel van het zachte doolhof. Degenen met kleinere cirkelbanen, die op zichzelf minder diffuus zijn, ervaarden de grootste relatieve toename in verspreiding wanneer obstakels werden toegevoegd. Robots met grotere banen zwerven al effectiever in vrije ruimte, dus hetzelfde niveau van bijsturing door obstakels levert hen een kleiner voordeel op. De studie liet ook zien dat de obstakeldichtheid die optimale verspreiding oplevert, verschuift met de baangrootte: robots die grotere cirkels afleggen bereiken hun piekdiffusie bij lagere obstakeldichtheden, omdat ze per omloop vaker met ringen in aanraking komen en daardoor vaker worden heroriënteerd.
Wat dit betekent voor actieve materie in de echte wereld
Simpel gezegd laat het werk zien dat een zachte, herconfigureerbare omgeving cirkelvormige, zelfaangedreven beweging kan omzetten in efficiënte langeafstandstransport—tot op zekere hoogte. Flexibele obstakels werken als verstelbare verkeersbarrières: bij matige dichtheid leiden ze zwervende ronddraaiers naar snellere banen; bij overbevolking veroorzaken ze verkeersopstoppingen die de beweging stilleggen. Deze inzichten helpen te verklaren hoe chirale microswimmers zich door complexe natuurlijke landschappen kunnen navigeren en suggereren ontwerprichtlijnen om kunstmatige microrobots door weefsels of poreuze materialen te sturen door zowel hun intrinsieke cirkelgedrag als de flexibiliteit en dichtheid van hun omgeving zorgvuldig af te stemmen.
Bronvermelding: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
Trefwoorden: actieve materie, microswimmers, chirale deeltjes, diffusie, complexe media