Clear Sky Science · it
Diffusione insolita di particelle Browniane attive chirali in mezzi deformabili e spostabili
Perché i minuscoli robot rotanti sono importanti
Immaginate uno sciame di minuscoli robot rotanti che cercano di muoversi attraverso un labirinto fatto non di pareti rigide, ma di anelli morbidi e flessibili che possono spostarsi. La loro capacità di disporsi nello spazio attraverso questo labirinto si rivela sorprendentemente importante per comprendere come veri microswimmer—come batteri o microrobot medici—si muovono in ambienti affollati come suolo, gel o tessuti viventi. Questo studio esplora come il moto circolare intrinseco di questi motori “chirali” si combina con ostacoli flessibili per produrre un risultato inatteso: in certi casi, aggiungere più ostacoli può in realtà farli diffondere più rapidamente. 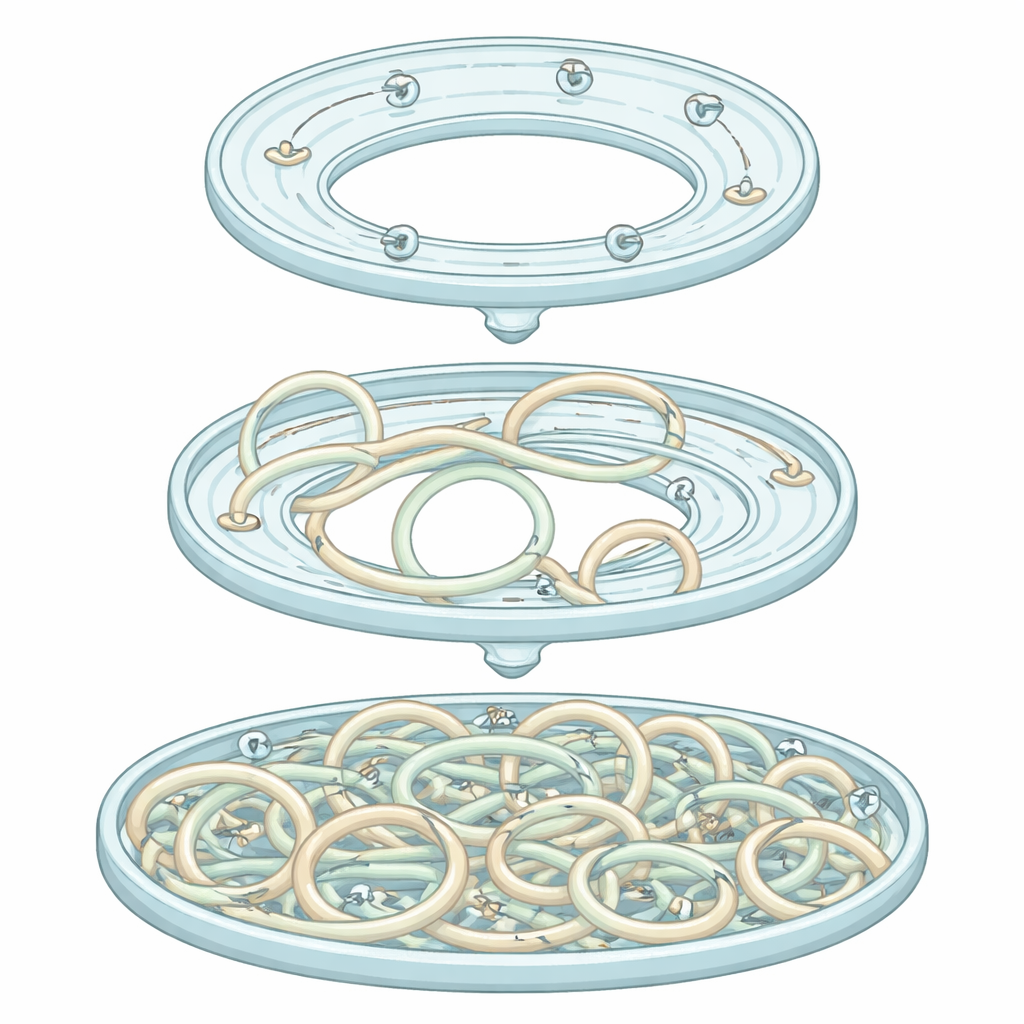
Rotatori in un labirinto morbido
I ricercatori hanno costruito un modello da tavolo di questi nuotatori usando piccoli robot commerciali Hexbug come sostituti delle particelle Browniane attive chirali—oggetti che si muovono in avanti e ruotano naturalmente, tracciando percorsi circolari. Questi robot sono stati confinati in una pista ad anello e circondati da sottili anelli d’acciaio che potevano piegarsi e scivolare quando colpiti. Regolando il numero di anelli posti all’interno del canale, il team ha potuto modulare in modo continuo quanto l’ambiente fosse affollato e tortuoso, da quasi vuoto fino a così denso che il moto si fermava quasi del tutto. Hanno quindi tracciato la posizione dei robot nel tempo per misurare quanto rapidamente si spostavano lungo l’anello.
Quando più ingombro significa diffusione più veloce
A prima vista, si potrebbe pensare che più ostacoli rallentino sempre i robot. Invece, la diffusione misurata—la velocità con cui i robot si disperdono lungo il canale—ha mostrato un andamento non monotono sorprendente. In assenza di anelli, i robot giravano per lo più su se stessi, quindi la loro dispersione netta era modesta. Man mano che il numero di anelli morbidi aumentava fino a un livello moderato, i robot li urtavano in modo tale che gli anelli flessibili si spostavano e “indirizzavano” dolcemente i robot verso traiettorie più dritte e persistenti che percorrevano lunghe distanze lungo il canale. In questo regime, la loro diffusione efficace è aumentata bruscamente, in alcuni casi di quasi un fattore 100 rispetto al caso senza ostacoli. Ma quando l’area occupata dagli anelli diventava molto grande, l’ambiente diventava così affollato che i robot venivano ripetutamente bloccati e infine quasi immobilizzati; la loro diffusione allora scendeva di nuovo verso zero. 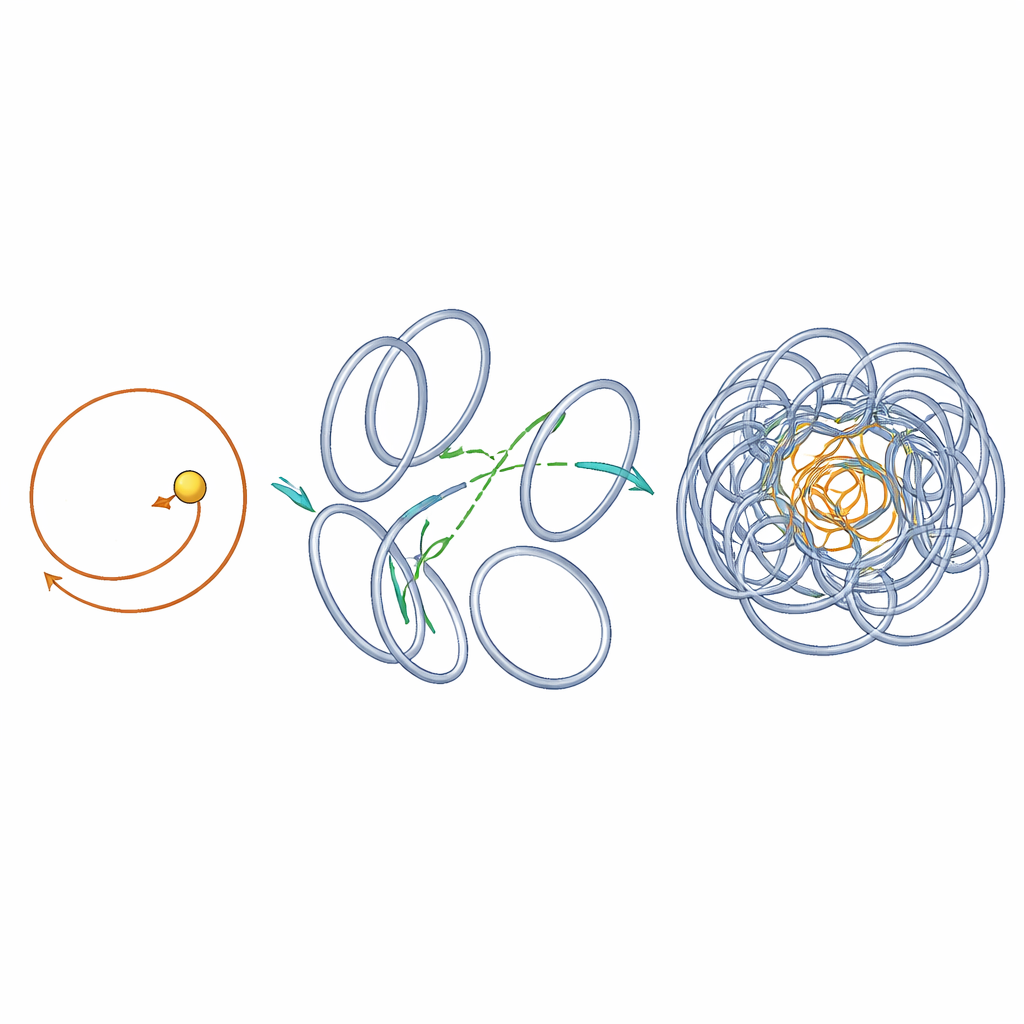
Anelli intrappolanti e lunghi viaggi
Per spiegare questo comportamento a sali e scendi, gli autori hanno identificato due modalità principali di moto. In uno stato “intrappolato”, un robot spinge via gli anelli vicini quel tanto che basta per creare una sorta di gabbia lassa e poi gira al suo interno, coprendo poco terreno. In uno stato “migrante”, ripetuti urti di striscio con gli anelli riorientano progressivamente il robot, facendo sì che il suo percorso circolare naturale si appiattisca in una lunga rotta simile a un corridoio. Usando uno strumento statistico che traccia per quanto tempo un robot rimane entro una certa finestra angolare, il team ha mostrato che il sistema si comporta come una miscela di anelli lenti e localizzati e viaggi veloci e diretti. Con l’aumentare della densità di ostacoli, i robot passano più tempo a migrare, ma la loro velocità in avanti è gradualmente ridotta dalle continue ostruzioni. Il tasso di diffusione è quindi determinato da una lotta tra quanto a lungo migrano e quanto velocemente possono muoversi mentre lo fanno.
Come dimensione e rotazione cambiano il risultato
Non tutti i robot hanno beneficiato allo stesso modo dal labirinto morbido. Quelli con orbite circolari più piccole, che da soli sono meno diffondenti, hanno sperimentato il maggior incremento relativo nella dispersione quando sono stati aggiunti ostacoli. I robot con orbite più grandi già vagano più efficacemente nello spazio libero, perciò lo stesso livello di guida da parte degli ostacoli offre loro un vantaggio minore. Lo studio ha inoltre mostrato che la densità di ostacoli che produce la massima dispersione dipende dalla dimensione dell’orbita: i robot che descrivono cerchi più ampi raggiungono la loro diffusione massima a densità di ostacoli più basse, perché urtano più anelli per giro e vengono riorientati più frequentemente.
Cosa significa per la materia attiva nel mondo reale
In termini semplici, il lavoro rivela che un ambiente morbido e riorganizzabile può trasformare un moto circolare auto-propulso in un trasporto efficiente su lunga distanza—fino a un certo punto. Gli ostacoli flessibili agiscono come barriere stradali regolabili: a densità moderate incanalano i rotatori erranti in corsie preferenziali; quando sono sovraffollati, generano ingorghi che arrestano il moto. Queste intuizioni aiutano a spiegare come i microswimmer chirali potrebbero orientarsi in paesaggi naturali complessi e suggeriscono regole di progetto per guidare microrobot artificiali attraverso tessuti o materiali porosi regolando con cura sia il loro comportamento di circolazione intrinseco sia la flessibilità e la densità dell’ambiente circostante.
Citazione: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
Parole chiave: materia attiva, micronuotatori, particelle chirali, diffusione, mezzi complessi