Clear Sky Science · ru
Необычная диффузия хиральных активных броуновских частиц в деформируемых и подвижных средах
Почему важны крошечные вращающиеся роботы
Представьте рой крошечных вращающихся роботов, пытающихся перемещаться по лабиринту, состоящему не из жёстких стен, а из мягких, гибких колец, которые могут сдвигаться с места. Насколько хорошо они распространяются по такому лабиринту оказывается критичным для понимания того, как настоящие микроскопические пловцы — например бактерии или медицинские микророботы — продвигаются в переполненных средах, таких как почва, гели или живая ткань. В этом исследовании изучается, как врождённое круговое движение этих «хиральных» движителей в сочетании с гибкими препятствиями даёт неожиданный эффект: в некоторых случаях добавление препятствий может на самом деле ускорить их распространение. 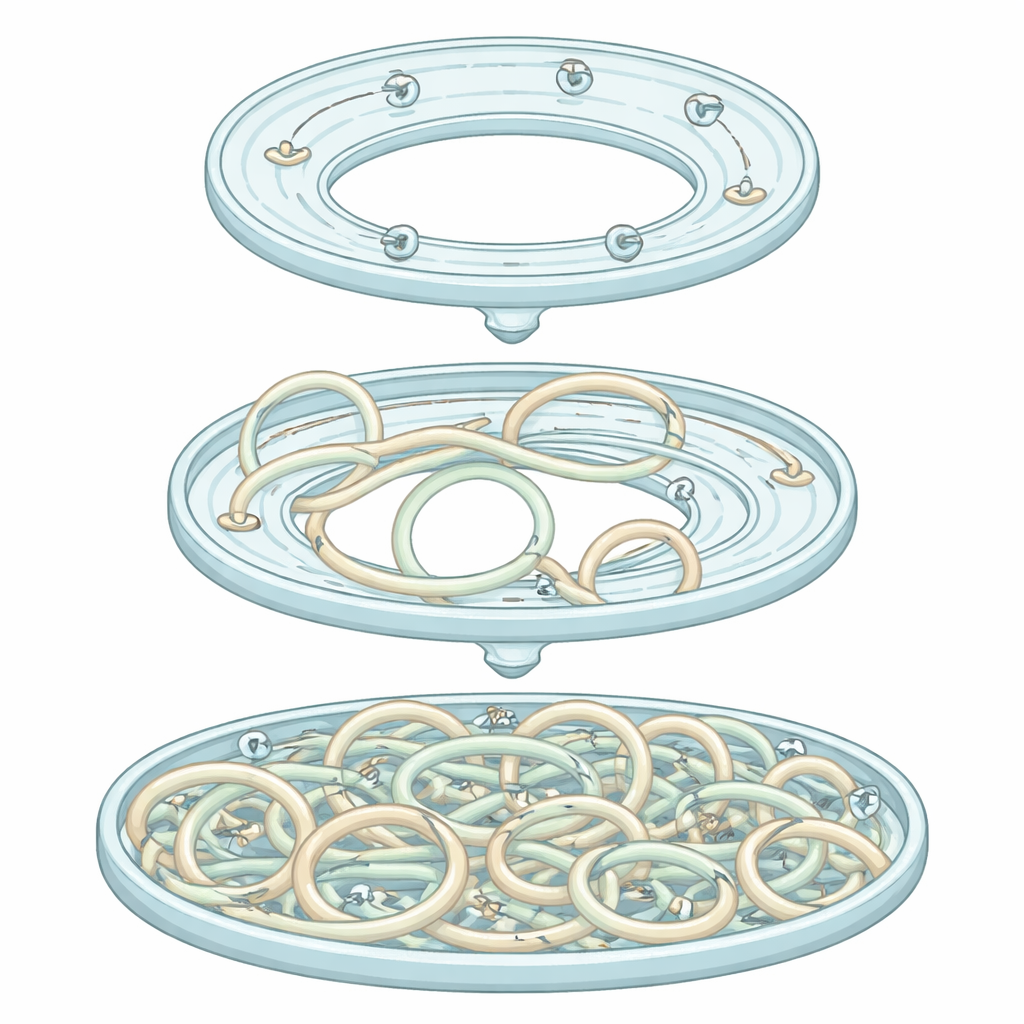
Вращающиеся роботы в мягком лабиринте
Исследователи построили настольную модель таких пловцов, используя небольшие коммерческие роботы Hexbug в качестве заменителей хиральных активных броуновских частиц — объектов, которые одновременно идут вперёд и самостоятельно поворачивают, описывая круговые траектории. Эти роботы были ограничены кольцевым треком и окружены тонкими стальными кольцами, которые могли сгибаться и сдвигаться при ударе. Меняя число колец внутри канала, команда могла плавно регулировать степень загруженности и извилистость среды — от почти пустой до настолько переполненной, что движение практически останавливалось. Затем они отслеживали положения роботов во времени, чтобы измерить, как быстро те блуждают по кольцу.
Когда больше захламления означает более быстрое распространение
На первый взгляд можно было бы ожидать, что больше препятствий всегда будет замедлять роботов. Вместо этого измеренная диффузия — скорость, с которой роботы распространяются по каналу — показала ярко выраженный немонотонный характер. Без колец роботы в основном кружились на месте, поэтому их суммарное распространение было умеренным. По мере увеличения числа мягких колец до умерённых значений роботы сталкивались с ними как раз так, что гибкие кольца смещались и мягко «направляли» роботов в более прямые, устойчивые траектории, простирающиеся на большие расстояния вдоль канала. В этом режиме их эффективная диффузия резко возрастала — в некоторых случаях почти в 100 раз по сравнению со случаем без препятствий. Но когда площадь, занятая кольцами, становилась слишком большой, среда становилась настолько переполненной, что роботов регулярно блокировали и они в конце концов почти лишались подвижности; их диффузия снижалась обратно к нулю. 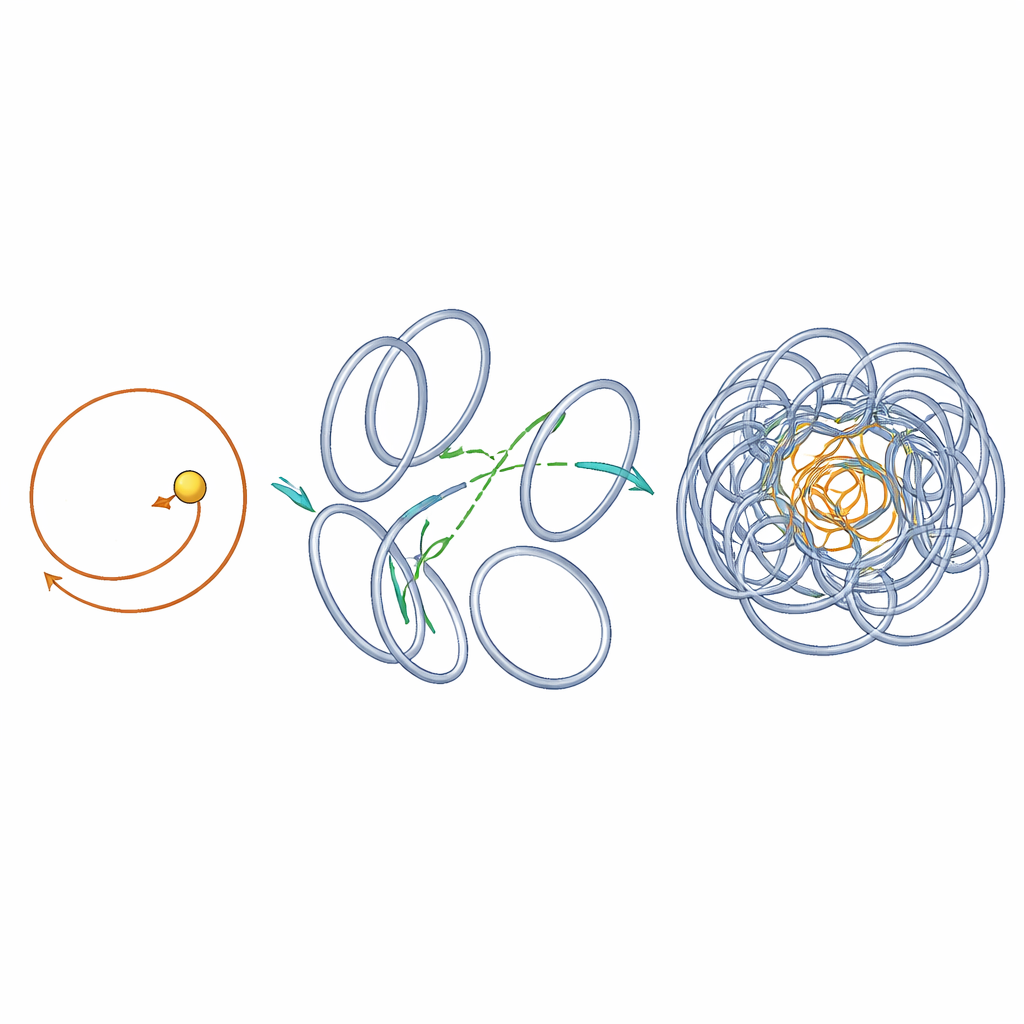
Запертые петли и дальние путешествия
Чтобы объяснить это поведение с подъёмом и падением, авторы выделили два основных режима движения. В «запертой» состоянии робот отталкивает соседние кольца лишь настолько, чтобы вырезать себе свободную клетку, и затем кружит внутри неё, покрывая мало пространства. В «мигрирующем» состоянии повторяющиеся касательные столкновения с кольцами поочерёдно перенаправляют робота так, что его естественная круговая траектория выпрямляется в длинный, похожий на коридор маршрут. Используя статистический инструмент, отслеживающий, как долго робот остаётся в пределах определённого углового окна, команда показала, что система ведёт себя как смесь медленных локализованных петель и быстрых направленных переходов. По мере увеличения плотности препятствий роботы проводят больше времени в миграции, но их поступательная скорость постепенно снижается из‑за постоянных помех. Следовательно, скорость диффузии определяется противоборством между тем, как долго они мигрируют, и тем, насколько быстро они могут двигаться в этом режиме.
Как размер орбиты и вращение меняют результат
Не все роботы одинаково выигрывали от мягкого лабиринта. Те, у кого были меньшие круговые орбиты и которые сами по себе менее диффузны, получили наибольший относительный прирост распространения при добавлении препятствий. Роботы с большими орбитами и так более эффективно блуждают в свободном пространстве, поэтому тот же уровень «направления» со стороны препятствий приносил им меньшую выгоду. Исследование также показало, что плотность препятствий, дающая оптимальное распространение, сдвигается в зависимости от размера орбиты: роботы, описывающие большие круги, достигают пика диффузии при более низких плотностях препятствий, потому что они сталкиваются с большим числом колец за оборот и их перенаправляют чаще.
Что это значит для реальной активной материи
Проще говоря, работа показывает, что мягкая, перенастраиваемая среда может превращать круговое самоприводное движение в эффективный дальнодействующий транспорт — но лишь до определённого предела. Гибкие препятствия действуют как регулируемые дорожные барьеры: при умеренной плотности они направляют блуждающих вращающихся частиц в скоростные коридоры; при переполнении они создают пробки, останавливающие движение. Эти выводы помогают объяснить, как хиральные микропловцы могут ориентироваться в сложных природных ландшафтах, и предлагают правила проектирования для управления искусственными микророботами в тканях или пористых материалах путём аккуратной настройки как их собственных циркулярных свойств, так и гибкости и плотности окружающей среды.
Цитирование: Zhang, K., Tian, Y., Yu, X. et al. Unusual diffusion of chiral active Brownian particles in deformable and displaceable media. Commun Phys 9, 157 (2026). https://doi.org/10.1038/s42005-026-02591-x
Ключевые слова: активная материя, микроплавцы, хиральные частицы, диффузия, сложные среды