Clear Sky Science · zh
由人工智能增强的几何控制:配备机械臂以补偿扰动的无人机
能“用手”的飞行机器人
想象一台不仅能看见,还能伸手、抓取并操作物体,同时在空中保持安全悬停的无人机。本研究展示了将飞行平台与机械臂结合,并配以由人工智能驱动的智能控制系统,如何使这类空中助手在风中和承担移动负载时保持稳定和可靠。
为何给无人机加装机械臂如此棘手
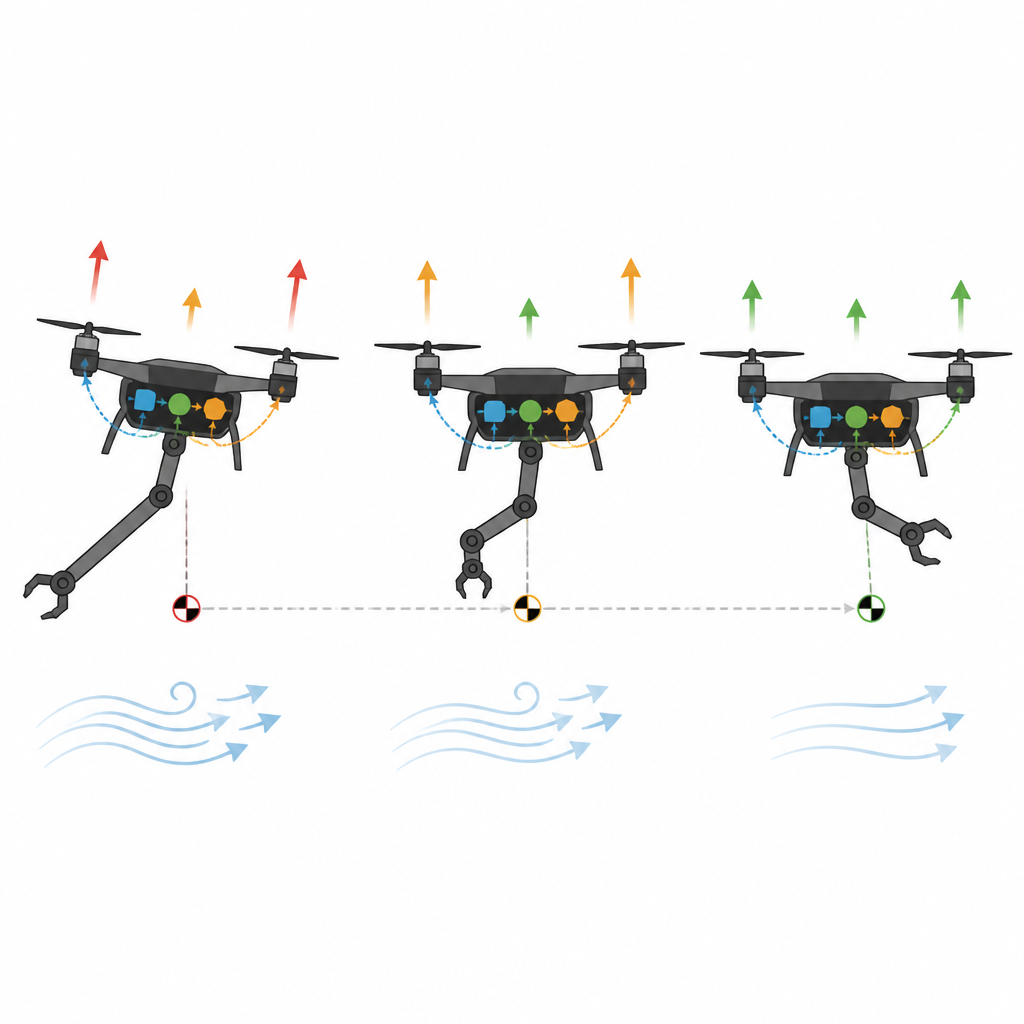
当无人机携带机械臂时,臂的每一次运动都会改变整机在空中的平衡。随着机械臂摆动或举起物体,无人机的质心发生偏移,额外力矩出现,而阵风会使情况更糟。传统控制方法在简单飞行和摄影任务中表现良好,但面对这些快速、非线性的变化时会遇到困难。它们可能导致机体晃动、回复缓慢,甚至在机械臂快速运动或处理较重负载时失控。挑战在于在附着的机械臂像一个移动且不可预测的负载时,仍然让无人机保持平稳并按轨迹飞行。

一种新的空中平衡思路
作者基于一种称为几何控制的现代方法,它直接在三维空间中描述无人机的姿态,而不是依赖可能引发混乱或不稳定的角度近似。这一数学框架为平滑操控提供了有力保证,避免了更简单方案常见的问题。在此基础上,他们设计了一款名为 HANA-26 的定制无人机,采用轻质碳纤维制造,并在近质心处安装了一条三关节机械臂。通过对飞行平台和机械臂的详细计算模型进行建模,他们模拟了机械臂移动及遭遇风扰或携带不同质量时力、力矩和质量分布的演变。
让人工智能预测即将到来的扰动
即便是很好的控制律,如果不知道即将发生的变化,也可能失效。为了解决这个问题,团队加入了一层基于长短期记忆网络(LSTM)的一种递归神经网络的人工智能模块。该网络在数万组来自仿真和真实飞行的数据上进行训练,涵盖不同的臂位、载荷和合成风 gust。它的任务是预测在短时间内随着机械臂运动将出现的额外扭矩和重心偏移。然后将这些预测与实时传感器读数在类似卡尔曼滤波的融合步骤中结合,得到对无人机将受到扰动的清晰估计,并作为经过限制的修正输入反馈给几何控制器,而不替代底层的安全控制律。
智能控制器在测试中的表现
为检验该方法的效果,研究者比较了三种策略:标准 PID 控制器、不带 AI 的几何控制器以及他们提出的 AI 增强几何控制器。他们在将 MATLAB 与 CoppeliaSim 联动的高保真仿真环境中,以及在 HANA-26 的室内外实际实验中测试悬停、机械臂动作和载荷处理。PID 控制器对轻负载表现尚可,但在机械臂快速移动或负载增大时会出现强烈振荡和缓慢稳定。纯几何控制改善了稳定性并减少了晃动,但在载荷增加或阵风增强时仍然吃力。加入 AI 层后,无人机的姿态误差明显减小,扰动后的恢复更快,电机被推到极限的情况也更少,即使在机械臂摆动并携带数百克负载时亦如此。
这对未来空中助手意味着什么
简而言之,该研究表明:赋予无人机对自身未来问题的“预见”能力,会大幅提升其在空中执行任务时的平衡能力。通过将稳健的几何控制与学习机械臂和载荷扰动模式的 AI 预测器相结合,系统能够保持稳定、降低能耗并执行更精确的任务。这种混合策略有望推动实用级空中机器人发展,使其在检查结构、采样或紧急救援等任务中,能在多变、有风的真实环境中安全地使用机械臂。
引用: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
关键词: 空中操作, UAV 机械臂, 几何控制, 人工智能控制, 扰动抑制