Clear Sky Science · pt
Controle geométrico aprimorado com IA para UAVs com braço robótico para compensação de perturbações
Robôs voadores que usam as mãos
Imagine um drone que não só consegue enxergar, mas também estender-se, agarrar e manipular objetos enquanto permanece com segurança no ar. Este estudo mostra como parear um robô voador com um braço robótico, e dotá‑lo de um sistema de controle inteligente movido por inteligência artificial, pode tornar esses assistentes aéreos estáveis e confiáveis mesmo com vento e durante o transporte de cargas que se deslocam.
Por que colocar um braço num drone é tão complicado
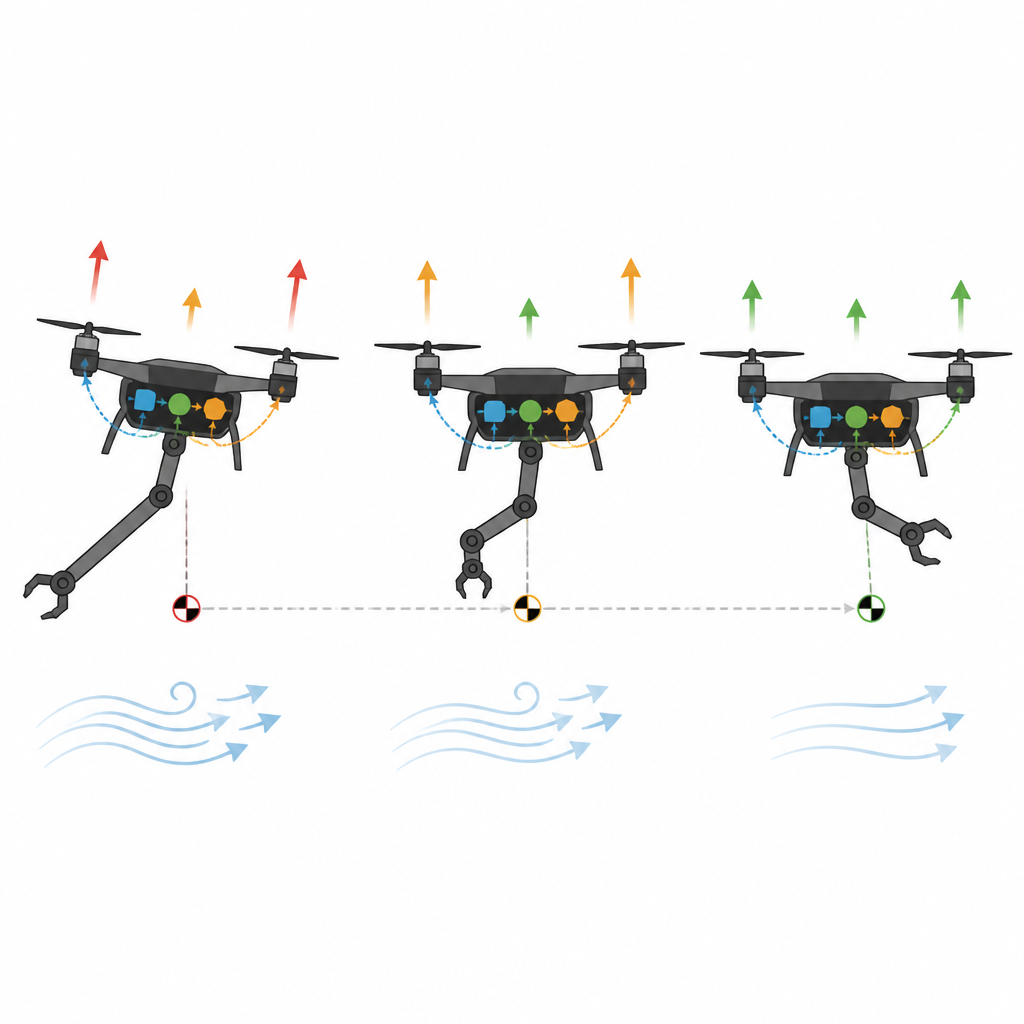
Quando um drone carrega um braço robótico, cada movimento desse braço altera o equilíbrio de toda a máquina no ar. À medida que o braço balança ou levanta um objeto, o centro de massa do drone se desloca, aparecem forças adicionais e rajadas de vento podem agravar tudo. Métodos de controle tradicionais, que funcionam bem para voo simples e fotografia, têm dificuldades com essas mudanças rápidas e não lineares. Eles podem causar tremores, recuperação lenta ou até perda de controle quando o braço se move rapidamente ou manipula cargas maiores. O desafio é manter o drone nivelado e na trajetória enquanto o braço acoplado age como uma carga móvel e imprevisível.

Uma nova forma de pensar o equilíbrio no ar
Os autores se baseiam em uma abordagem moderna chamada controle geométrico, que descreve a orientação do drone diretamente no espaço tridimensional em vez de depender de atalhos angulares que podem se tornar confusos ou instáveis. Esse arcabouço matemático fornece garantias fortes de que o drone pode ser direcionado de forma suave e sem as falhas típicas de esquemas mais simples. Sobre isso, eles projetam um drone personalizado, HANA-26, feito de fibra de carbono leve, com um braço robótico de três juntas montado próximo ao centro de massa do veículo. Usando modelos computacionais detalhados tanto para a plataforma de voo quanto para o braço, simulam como forças, torques e distribuição de massa evoluem quando o braço se move e quando o drone é atingido por vento ou carrega diferentes pesos.
Deixando a IA prever a próxima perturbação
Mesmo uma boa lei de controle pode falhar se não souber o que está prestes a acontecer. Para tratar disso, a equipe adiciona uma camada de inteligência artificial baseada em um tipo de rede neural recorrente chamada LSTM. Essa rede é treinada com dezenas de milhares de exemplos de simulações e voos reais, incluindo diferentes posições do braço, cargas úteis e rajadas de vento sintéticas. Sua tarefa é prever os torques extras e os deslocamentos de equilíbrio que surgirão em um curto intervalo de tempo no futuro conforme o braço se move. Essas previsões são então fundidas com leituras de sensores em tempo real em uma etapa semelhante a um filtro de Kalman. O resultado é uma estimativa limpa de como o drone será perturbado, que é fornecida ao controlador geométrico como uma correção cuidadosamente limitada, sem substituir as leis de controle seguras subjacentes.
Como o controlador inteligente se comporta nos testes
Para verificar se a abordagem realmente ajuda, os pesquisadores comparam três estratégias: um controlador PID padrão, um controlador geométrico sem IA e seu controlador geométrico aprimorado por IA. Eles os testam em um simulador de alta fidelidade integrando MATLAB com CoppeliaSim, e em experimentos reais com o HANA-26 realizando pairar, movimentos do braço e manuseio de carga em ambientes internos e externos. O controlador PID funciona aceitavelmente para cargas leves, mas apresenta fortes oscilações e assentamento lento quando o braço se move rapidamente ou transporta massas maiores. O controle geométrico puro melhora a estabilidade e reduz tremores, mas ainda tem dificuldades quando a carga cresce ou as rajadas de vento ficam mais fortes. Com a camada de IA adicionada, o drone mantém erros de atitude muito menores, recupera‑se mais rápido após perturbações e evita levar seus motores aos limites com tanta frequência, mesmo quando o braço balança com cargas de até algumas centenas de gramas.
O que isso significa para futuros ajudantes voadores
Em termos simples, o estudo mostra que dar ao drone uma noção de seus problemas futuros o torna muito melhor em manter o equilíbrio enquanto trabalha no ar. Ao combinar um controlador geométrico robusto com um preditor por IA que aprende como o braço e a carga irão perturbar o voo, o sistema pode permanecer estável, desperdiçar menos energia e executar tarefas com mais precisão. Essa estratégia híbrida pode ajudar a viabilizar robôs aéreos práticos que inspecionem estruturas, coletem amostras ou auxiliem em emergências, tudo isso usando braços robóticos de forma segura em condições reais de vento e incerteza.
Citação: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
Palavras-chave: manipulação aérea, UAV com braço robótico, controle geométrico, controle por IA, rejeição de perturbações