Clear Sky Science · fr
Contrôle géométrique amélioré par IA pour UAV avec un bras robotisé compensant les perturbations
Des robots volants qui savent utiliser leurs mains
Imaginez un drone qui non seulement voit, mais peut aussi tendre la main, saisir et manipuler des objets tout en restant en sécurité dans les airs. Cette étude montre comment l’association d’un robot volant et d’un bras robotisé, dotée d’un système de contrôle intelligent reposant sur l’intelligence artificielle, peut rendre ces assistants aériens stables et fiables, même en présence de vent et de charges qui se déplacent.
Pourquoi ajouter un bras à un drone est si délicat
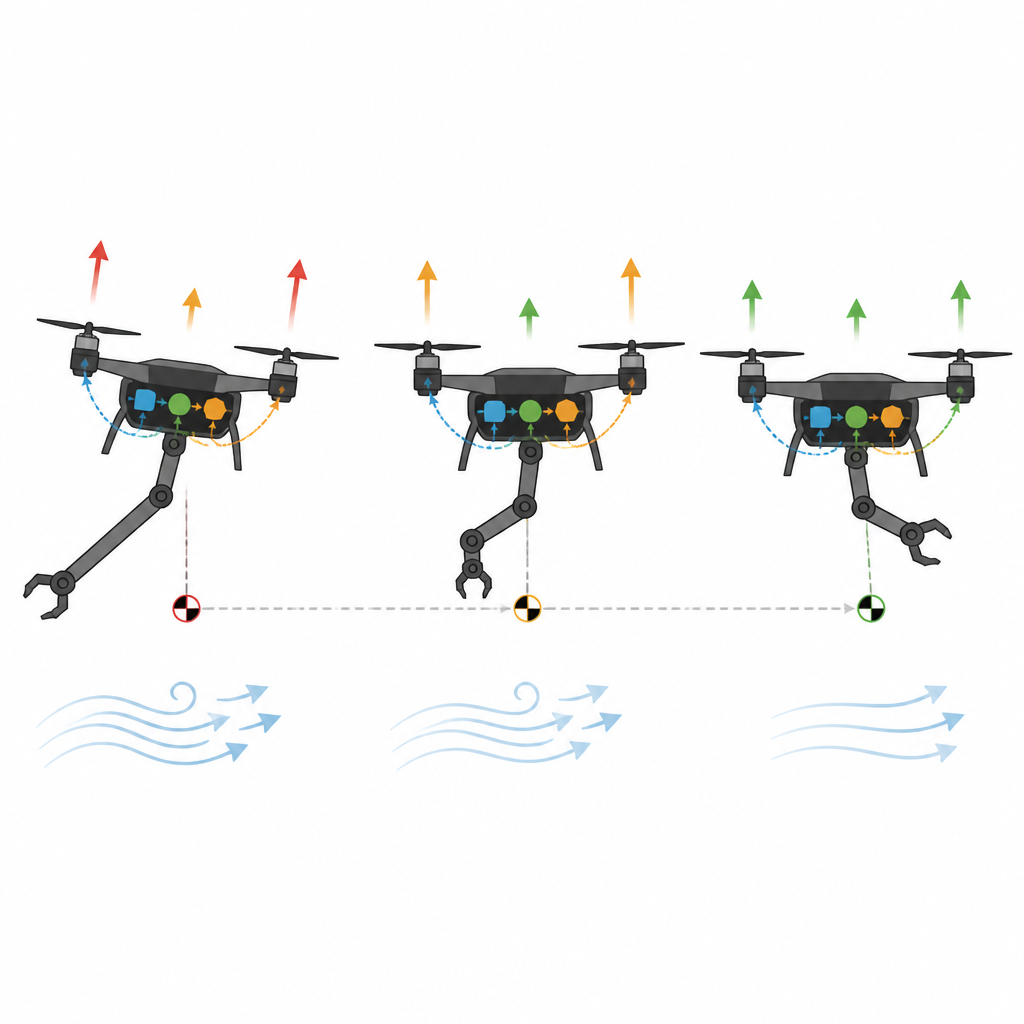
Quand un drone porte un bras robotisé, chaque mouvement de ce bras modifie l’équilibre de l’ensemble de l’appareil en vol. Quand le bras se balance ou soulève un objet, le centre de masse du drone se déplace, des forces supplémentaires apparaissent, et des rafales de vent peuvent aggraver la situation. Les méthodes de contrôle classiques, efficaces pour le vol simple et la photographie, peinent face à ces changements rapides et non linéaires. Elles peuvent entraîner des oscillations, une récupération lente, voire une perte de contrôle lorsque le bras bouge rapidement ou transporte des charges plus lourdes. Le défi consiste à garder le drone à niveau et sur la trajectoire souhaitée alors que le bras monté se comporte comme une charge mobile et imprévisible.

Une nouvelle façon d’envisager l’équilibre en vol
Les auteurs s’appuient sur une approche moderne appelée contrôle géométrique, qui décrit l’orientation du drone directement dans l’espace tridimensionnel au lieu de se reposer sur des angles intermédiaires pouvant devenir confus ou instables. Ce cadre mathématique offre de fortes garanties pour piloter le drone de manière fluide et sans les comportements aberrants qui affectent les schémas plus simples. Sur cette base, ils conçoivent un drone sur mesure, le HANA-26, en fibre de carbone légère, avec un bras robotisé à trois articulations monté près du centre de masse du drone. À l’aide de modèles informatiques détaillés pour la plateforme volante et pour le bras, ils simulent l’évolution des forces, des couples et de la répartition des masses lorsque le bras bouge et lorsque le drone subit des vents ou transporte différentes charges.
Permettre à l’IA d’anticiper la prochaine perturbation
Même une loi de commande très performante peut faiblir si elle ignore ce qui va se produire. Pour y remédier, l’équipe ajoute une couche d’intelligence artificielle basée sur un type de réseau de neurones récurrent appelé LSTM. Ce réseau est entraîné sur des dizaines de milliers d’exemples issus de simulations et de vols réels, incluant différentes positions du bras, des charges utiles et des rafales de vent synthétiques. Sa tâche est de prédire les couples supplémentaires et les déplacements d’équilibre qui apparaîtront à court terme lorsque le bras se déplacera. Ces prédictions sont ensuite fusionnées avec les mesures des capteurs en temps réel lors d’une étape de fusion similaire à un filtre de Kalman. Le résultat est une estimation nette des perturbations à venir, qui est injectée dans le contrôleur géométrique sous forme d’une correction soigneusement limitée, sans remplacer les lois de commande sûres sous-jacentes.
Comment le contrôleur intelligent se comporte dans les essais
Pour vérifier l’efficacité de l’approche, les chercheurs comparent trois stratégies : un contrôleur PID standard, un contrôleur géométrique sans IA, et leur contrôleur géométrique enrichi par l’IA. Ils les testent dans un simulateur haute fidélité reliant MATLAB à CoppeliaSim, et dans des expériences réelles avec le HANA-26 réalisant des vols stationnaires, des mouvements de bras et la manipulation de charges en intérieur et en extérieur. Le contrôleur PID fonctionne correctement pour des charges légères mais montre de fortes oscillations et une stabilisation lente quand le bras bouge rapidement ou transporte des masses plus importantes. Le contrôle géométrique pur améliore la stabilité et réduit le tangage, mais peine encore lorsque la charge augmente ou que les rafales deviennent plus fortes. Avec la couche IA ajoutée, le drone conserve des erreurs d’attitude bien plus faibles, récupère plus vite après les perturbations, et évite d’envoyer ses moteurs à leurs limites aussi souvent, même lorsque le bras se balance avec des charges jusqu’à plusieurs centaines de grammes.
Ce que cela signifie pour les futurs assistants volants
En termes simples, l’étude montre que doter un drone d’une capacité à prévoir ses propres perturbations le rend beaucoup plus apte à garder l’équilibre lorsqu’il travaille en vol. En combinant un contrôleur géométrique robuste avec un prédicteur IA qui apprend comment le bras et la charge perturberont le vol, le système reste stable, consomme moins d’énergie et accomplit des tâches avec plus de précision. Cette stratégie hybride pourrait faciliter le déploiement de robots aériens pratiques pour inspecter des structures, prélever des échantillons ou aider lors d’urgences, tout en utilisant en toute sécurité des bras robotisés dans des conditions réelles venteuses et incertaines.
Citation: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
Mots-clés: manipulation aérienne, bras robotisé d’UAV, contrôle géométrique, contrôle par IA, rejet des perturbations