Clear Sky Science · ar
تحكم هندسي محسن مدعوم بالذكاء الاصطناعي للطائرات دون طيار ذات ذراع روبوتية لتعويض الاضطرابات
روبوتات طائرة تستطيع استخدام يديها
تخيل طائرة درون لا تكتفي بالرؤية فقط، بل تمتد بأذرعها لتلتقط وتحرك الأشياء بينما تظل ثابتة في الهواء. توضح هذه الدراسة كيف أن إقران طائرة طائرة بذراع روبوتية وتزويدها بنظام تحكم ذكي مدعوم بالذكاء الاصطناعي قد يجعل هذه المساعدات الجوية ثابتة وموثوقة حتى في وجود الرياح وعند حمل أحمال متغيرة.
لماذا إرفاق ذراع بالطائرة صعب للغاية
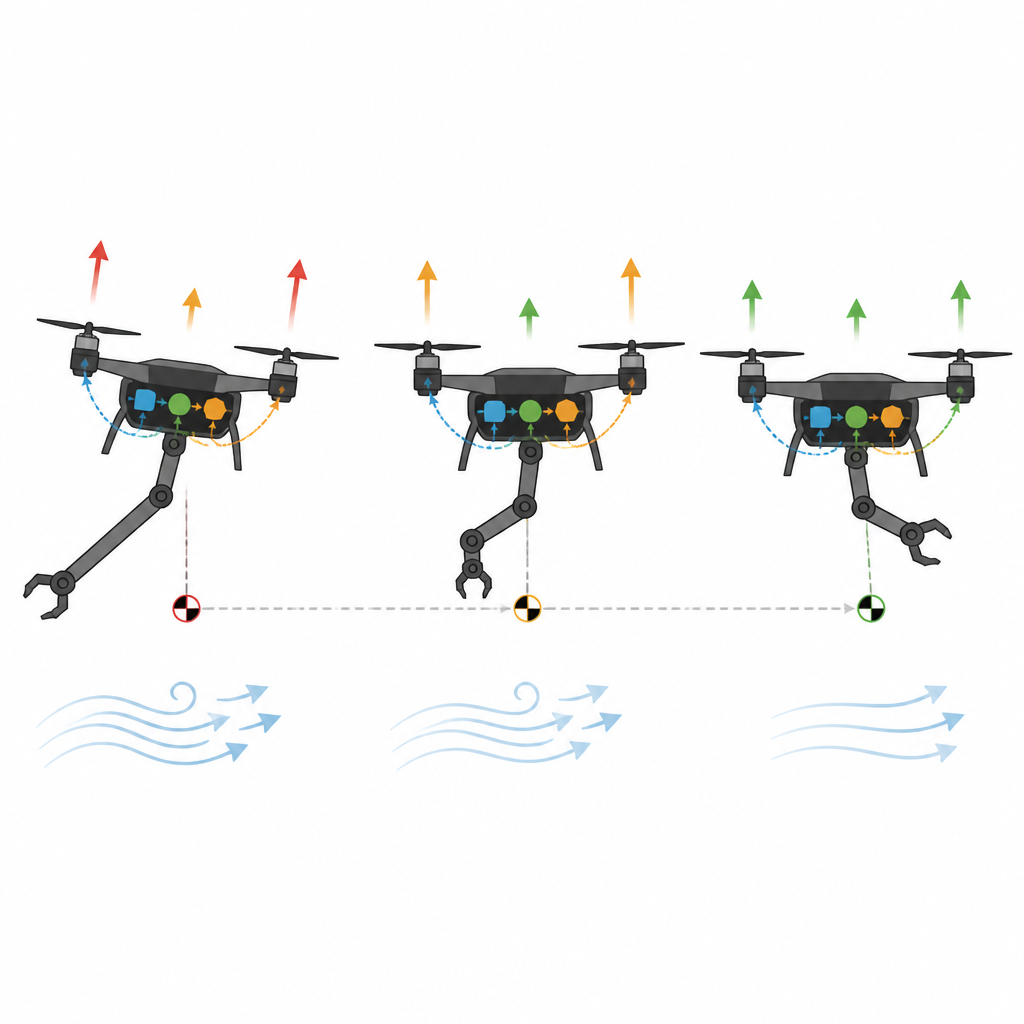
عندما تحمل الطائرة ذراعًا روبوتية، فإن كل حركة للذراع تغير كيف يتوازن الجسم ككل في الهواء. مع تأرجح الذراع أو رفع غرض ما، يتحرك مركز الكتلة للطائرة، وتظهر قوى إضافية، وقد تزيد هبات الرياح الوضع سوءًا. الطرق التقليدية للتحكم، التي تعمل جيدًا للطيران البسيط والتصوير، تجد صعوبة مع هذه التغيرات السريعة وغير الخطية. يمكن أن تتسبب هذه الطرق في اهتزازات، بطء في الاستقرار، أو حتى فقدان السيطرة عندما تتحرك الذراع بسرعة أو تتعامل مع أحمال أثقل. التحدي هو إبقاء الطائرة مستوية وعلى المسار بينما تتصرف الذراع الملحقة بها كحمولة متحركة وغير متوقعة.

طريقة جديدة للتفكير في التوازن الجوي
يبني المؤلفون على نهج حديث يسمى التحكم الهندسي، الذي يصف اتجاه الطائرة مباشرة في الفضاء ثلاثي الأبعاد بدلاً من الاعتماد على اختصارات زوايا قد تصبح مضللة أو غير مستقرة. يوفر هذا الإطار الرياضي ضمانات قوية بأن الطائرة يمكن توجيهها بسلاسة وبدون العيوب المعتادة التي تعاني منها الأساليب الأبسط. بالإضافة إلى ذلك، صمموا طائرة مخصصة تسمى HANA-26 مصنوعة من ألياف الكربون خفيفة الوزن، مزودة بذراع روبوتية ذات ثلاث وصلات مركبة بالقرب من مركز كتلة الطائرة. باستخدام نماذج حاسوبية مفصلة لكل من منصة الطيران والذراع، يحاكون كيف تتطور القوى والعزوم وتوزيع الكتلة عندما تتحرك الذراع وعندما تتعرض الطائرة لهبوب الرياح أو تحمل أوزانًا مختلفة.
تمكين الذكاء الاصطناعي من توقع الاضطراب القادم
حتى قانون تحكم جيد جدًا قد يفشل إذا لم يكن يعرف ما سيحدث لاحقًا. للتعامل مع ذلك، أضاف الفريق طبقة ذكاء اصطناعي مبنية على نوع من الشبكات العصبية المتكررة يُعرف باسم LSTM. تم تدريب هذه الشبكة على عشرات الآلاف من الأمثلة من المحاكاة والرحلات الحقيقية، بما في ذلك مواضع الذراع المختلفة والحمولات وهبات رياح صناعية. تكمن مهمتها في التنبؤ بعزوم الالتواء الإضافية وتحولات التوازن التي ستظهر بعد وقت قصير مع حركة الذراع. تُدمج هذه التنبؤات بعد ذلك مع قراءات المستشعرات الحية في خطوة دمج شبيهة بمرشح كالمان. النتيجة هي تقدير واضح لكيفية تعرّض الطائرة للاضطراب، يُغذى إلى المتحكم الهندسي كتعديل محدود بعناية، دون استبدال قوانين التحكم الأساسية الآمنة.
كيف يتصرف المتحكم الذكي في الاختبارات
لمعرفة ما إذا كان هذا النهج مفيدًا حقًا، يقارن الباحثون ثلاث استراتيجيات: متحكم PID قياسي، متحكم هندسي بدون ذكاء اصطناعي، ومتحكم هندسي معزز بالذكاء الاصطناعي. اختبروها في محاكٍ عالي الدقة يربط MATLAB مع CoppeliaSim، وفي تجارب حقيقية مع HANA-26 تقوم بالتحويم، وحركات الذراع، والتعامل مع الحمولة في بيئات داخلية وخارجية. يعمل متحكم PID بشكل مقبول للأحمال الخفيفة لكنه يظهر تذبذبات قوية وبطء في الاستقرار عندما تتحرك الذراع بسرعة أو تحمل كتلًا أثقل. يحسّن التحكم الهندسي الخالص الاستقرار ويقلل الاهتزاز، لكنه لا يزال يواجه صعوبات عند زيادة الحمولة أو شدة هبات الرياح. مع إضافة طبقة الذكاء الاصطناعي، تحافظ الطائرة على أخطاء سلوكية أصغر بكثير، وتتأقلم أسرع بعد الاضطرابات، وتتجنب دفع محركاتها إلى حدودها كثيرًا، حتى عندما تتأرجح الذراع مع حمولات تصل إلى عدة مئات من الغرامات.
ماذا يعني هذا لمستقبل المساعدين الطائرين
بعبارات بسيطة، تُظهر الدراسة أن منح الطائرة قدرة على الإدراك المسبق لمشاكلها يجعلها أفضل بكثير في الحفاظ على توازنها أثناء العمل في الهواء. من خلال الجمع بين متحكم هندسي قوي ومتنبئ ذكاء اصطناعي يتعلم كيف ستُزعج الطائرة بحركة الذراع والحمولة، يمكن للنظام أن يبقى مستقرًا، ويهدر طاقة أقل، وينفذ مهامًا أكثر دقة. قد تساعد هذه الاستراتيجية الهجينة في تمكين روبوتات جوية عملية تفحص المنشآت، تلتقط عينات، أو تساعد في حالات الطوارئ، مع استخدام آمن للأذرع الروبوتية في ظروف العالم الحقيقي العاصف وغير المحدد.
الاستشهاد: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
الكلمات المفتاحية: التلاعب الجوي, ذراع روبوتية لطائرة بدون طيار, تحكم هندسي, تحكم بالذكاء الاصطناعي, رفض الاضطرابات