Clear Sky Science · de
Erweiterte geometrische Regelung mit KI-Unterstützung für UAVs mit Roboterarm zur Kompensation von Störungen
Fliegende Roboter, die ihre Hände nutzen können
Stellen Sie sich eine Drohne vor, die nicht nur sehen, sondern auch greifen und Objekte manipulieren kann, während sie sicher in der Luft bleibt. Diese Studie zeigt, wie die Kombination eines fliegenden Roboters mit einem Roboterarm und einem intelligenten Regelungssystem auf Basis künstlicher Intelligenz solche luftgestützten Helfer stabil und zuverlässig machen kann – selbst bei Wind und schwankenden Lasten.
Warum ein Arm an einer Drohne so schwierig ist
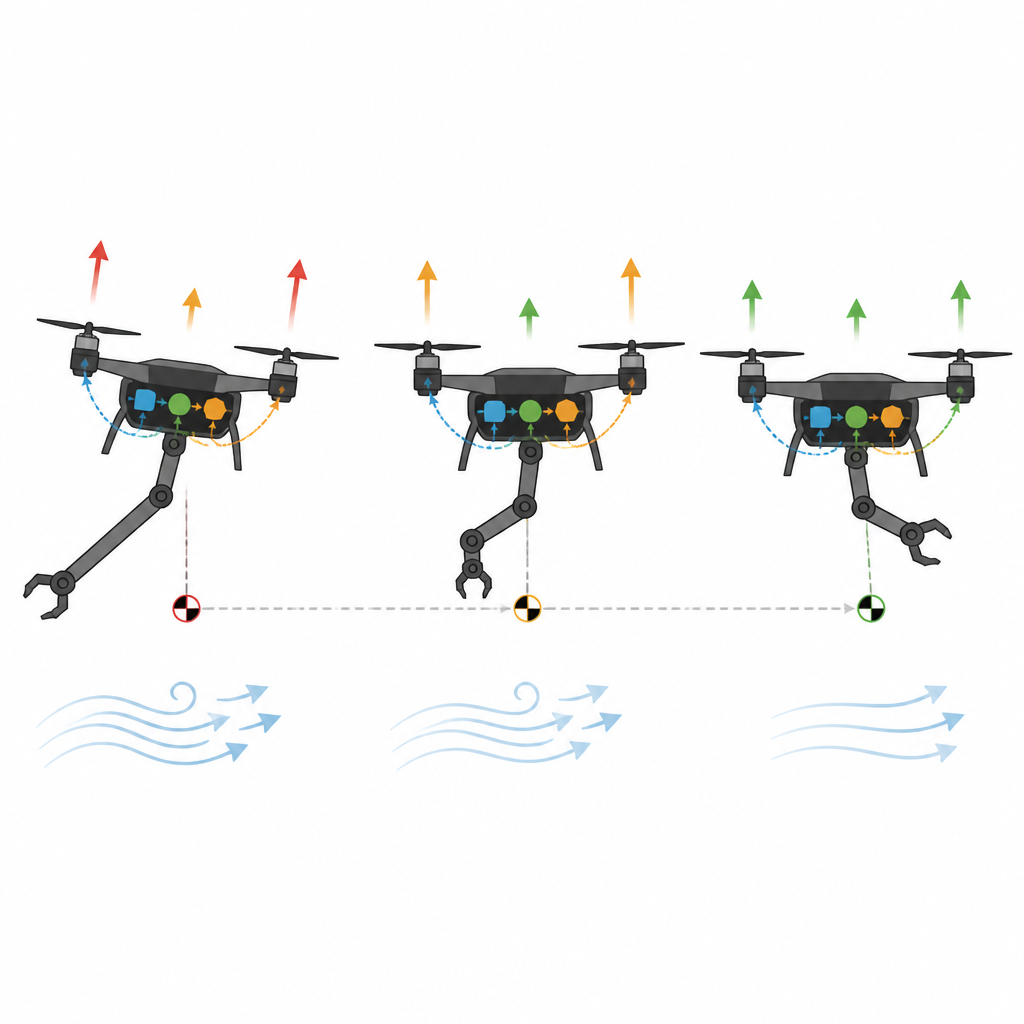
Wenn eine Drohne einen Roboterarm trägt, verändert jede Bewegung dieses Arms das Gleichgewicht des gesamten Fluggeräts. Sobald der Arm schwingt oder ein Objekt hebt, verschiebt sich der Schwerpunkt, es entstehen zusätzliche Kräfte, und Windböen verschlimmern die Situation. Traditionelle Regelungsverfahren, die bei einfachem Fliegen und Fotografie gut funktionieren, kommen mit diesen schnellen, nichtlinearen Änderungen oft nicht zurecht. Dies kann zu Schaukelbewegungen, langsamer Erholung oder sogar Kontrollverlust führen, wenn der Arm sich schnell bewegt oder schwerere Nutzlasten handhabt. Die Herausforderung besteht darin, die Drohne eben und auf Kurs zu halten, während ihr angehängter Arm sich wie eine bewegliche, unvorhersehbare Last verhält.

Ein neuer Ansatz fürs Gleichgewicht in der Luft
Die Autoren bauen auf einem modernen Ansatz namens geometrische Regelung auf, der die Orientierung der Drohne direkt im dreidimensionalen Raum beschreibt, anstatt sich auf Winkel-Kurzschlüsse zu stützen, die verwirrend oder instabil werden können. Dieser mathematische Rahmen liefert starke Garantien dafür, dass die Drohne glatt und ohne die üblichen Eigenheiten gesteuert werden kann, die einfachere Verfahren plagen. Darauf aufbauend entwerfen sie eine maßgeschneiderte Drohne, HANA-26, aus leichtem Kohlefaserverbund, mit einem dreigelenkigen Roboterarm, der nahe dem Schwerpunkt der Drohne montiert ist. Mithilfe detaillierter Computermodelle für sowohl die Flugplattform als auch den Arm simulieren sie, wie sich Kräfte, Drehmomente und Massenverteilung entwickeln, wenn sich der Arm bewegt und wenn die Drohne von Wind getroffen wird oder unterschiedliche Gewichte trägt.
KI vorhersagen lassen, welche Störung als Nächstes kommt
Selbst ein sehr gutes Regelgesetz kann versagen, wenn es nicht weiß, was als Nächstes passieren wird. Um dem zu begegnen, ergänzt das Team die Regelung um eine KI-Schicht, basierend auf einem rekurrenten neuronalen Netztyp namens LSTM. Dieses Netzwerk wird mit zehntausenden Beispielen aus Simulationen und echten Flügen trainiert, einschließlich verschiedener Armstellungen, Nutzlasten und synthetischer Windböen. Seine Aufgabe ist es, die zusätzlichen Drehkräfte und Verschiebungen des Gleichgewichts vorherzusagen, die in kurzer Zeit auftreten werden, wenn sich der Arm bewegt. Diese Vorhersagen werden dann in einem Fusionsschritt ähnlich einem Kalman-Filter mit Live-Sensordaten verschmolzen. Das Ergebnis ist eine saubere Schätzung, wie die Drohne gestört werden wird, die als sorgfältig begrenzte Korrektur in den geometrischen Regler eingespeist wird, ohne die zugrunde liegenden sicheren Regelgesetze zu ersetzen.
Wie sich der intelligente Regler in Tests verhält
Um zu prüfen, ob dieser Ansatz wirklich hilft, vergleichen die Forscher drei Strategien: einen standardmäßigen PID-Regler, einen geometrischen Regler ohne KI und ihren KI-ergänzten geometrischen Regler. Sie testen diese in einem hochgetreuen Simulator, der MATLAB mit CoppeliaSim koppelt, und in realen Experimenten mit der HANA-26 bei Schwebeflügen, Armbewegungen und Nutzlastmanipulationen in Innen- und Außenbereichen. Der PID-Regler funktioniert bei leichten Lasten akzeptabel, zeigt jedoch starke Schwingungen und langsames Einschwingen, wenn der Arm sich schnell bewegt oder schwerere Massen trägt. Reine geometrische Regelung verbessert die Stabilität und verringert das Wackeln, hat jedoch weiterhin Probleme, wenn die Nutzlast zunimmt oder Windböen stärker werden. Mit der zusätzlichen KI-Schicht hält die Drohne deutlich kleinere Lageregelabweichungen, erholt sich schneller nach Störungen und vermeidet es, die Motoren so häufig an ihre Grenzen zu treiben, selbst wenn der Arm mit Nutzlasten bis zu mehreren hundert Gramm schwingt.
Was das für zukünftige fliegende Helfer bedeutet
Kurz gesagt zeigt die Studie, dass eine Drohne mit einer Vorahnung ihrer eigenen künftigen Probleme deutlich besser ihr Gleichgewicht halten kann, während sie in der Luft arbeitet. Durch die Kombination eines soliden geometrischen Reglers mit einem KI-Prädiktor, der lernt, wie Arm und Nutzlast den Flug stören werden, kann das System stabil bleiben, weniger Energie verschwenden und präzisere Aufgaben ausführen. Diese hybride Strategie könnte praktische Luftroboter ermöglichen, die Strukturen inspizieren, Proben aufnehmen oder in Notfällen helfen – und das alles sicher mit Roboterarmen unter windigen, unsicheren Realbedingungen.
Zitation: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
Schlüsselwörter: Luftmanipulation, UAV-Roboterarm, geometrische Regelung, KI-Regelung, Störungsunterdrückung