Clear Sky Science · en
Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances
Flying robots that can use their hands
Imagine a drone that can not only see but also reach out, grab, and manipulate objects while staying safely in the air. This study shows how pairing a flying robot with a robotic arm, and giving it a smart control system powered by artificial intelligence, could make such airborne helpers stable and reliable even in wind and while carrying shifting loads.
Why putting an arm on a drone is so tricky
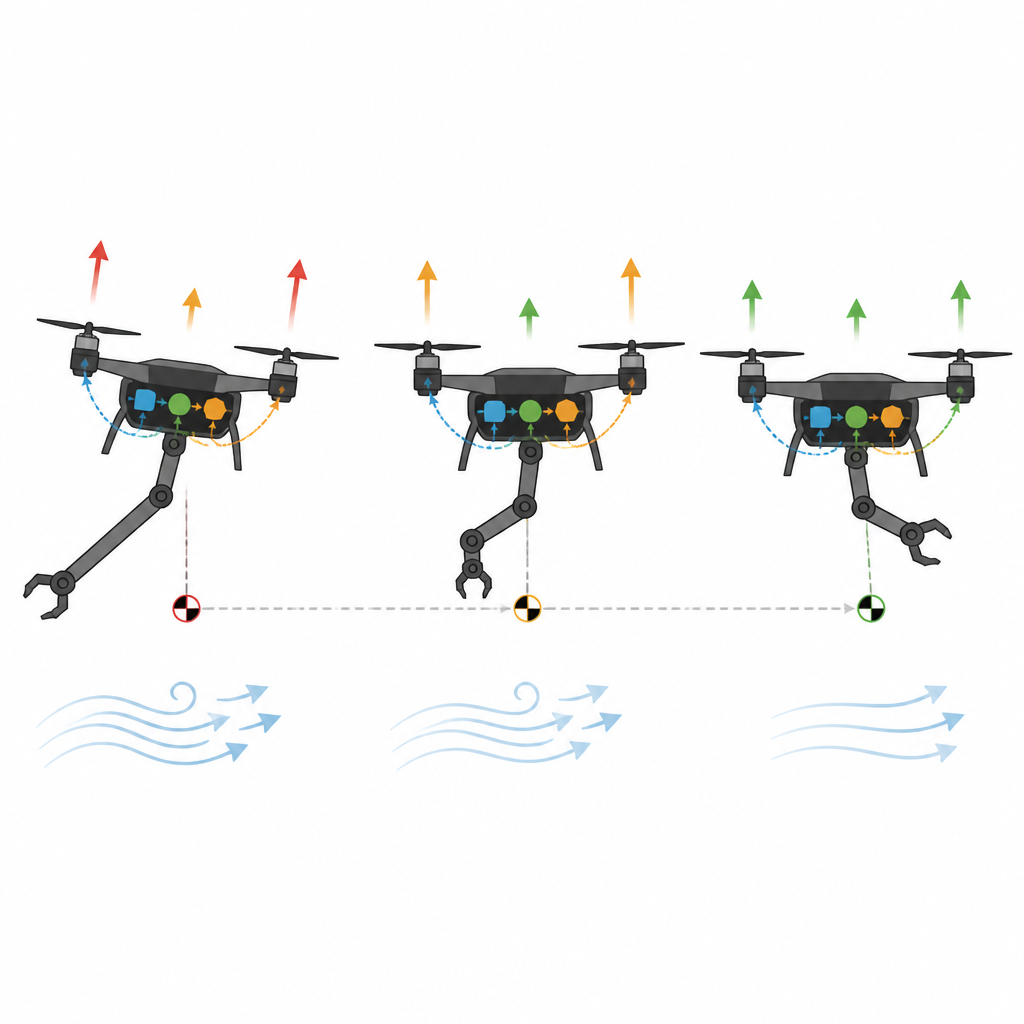
When a drone carries a robotic arm, every movement of that arm changes how the whole machine balances in the air. As the arm swings or lifts an object, the drone’s center of mass shifts, extra forces appear, and gusts of wind can make everything worse. Traditional control methods, which work well for simple flying and photography, struggle with these fast, nonlinear changes. They can lead to wobbling, slow recovery, or even loss of control when the arm moves quickly or handles heavier payloads. The challenge is to keep the drone level and on track while its attached arm behaves like a moving, unpredictable load.

A new way to think about balance in the air
The authors build on a modern approach called geometric control, which describes the drone’s orientation directly in three-dimensional space instead of relying on angle shortcuts that can become confusing or unstable. This mathematical framework gives strong guarantees that the drone can be steered smoothly and without the usual quirks that plague simpler schemes. On top of this, they design a custom drone, HANA-26, made from lightweight carbon fiber, with a three-joint robotic arm mounted near the drone’s center of mass. Using detailed computer models for both the flying platform and the arm, they simulate how forces, torques, and mass distribution evolve when the arm moves and when the drone is hit by wind or carries different weights.
Letting AI guess the next disturbance
Even a very good control law can falter if it does not know what is about to happen. To address this, the team adds an artificial intelligence layer based on a type of recurrent neural network called an LSTM. This network is trained on tens of thousands of examples from simulations and real flights, including different arm positions, payloads, and synthetic wind gusts. Its job is to predict the extra twisting forces and shifts in balance that will appear a short time into the future as the arm moves. These predictions are then blended with live sensor readings in a fusion step similar to a Kalman filter. The result is a clean estimate of how the drone will be disturbed, which is fed into the geometric controller as a carefully limited correction, without replacing the underlying safe control laws.
How the smart controller behaves in tests
To see whether this approach really helps, the researchers compare three strategies: a standard PID controller, a geometric controller without AI, and their AI-enhanced geometric controller. They test them in a high-fidelity simulator linking MATLAB with CoppeliaSim, and in real experiments with HANA-26 performing hovering, arm motions, and payload handling in indoor and outdoor settings. The PID controller works acceptably for light loads but shows strong oscillations and slow settling when the arm moves quickly or carries heavier masses. Pure geometric control improves stability and reduces wobble, yet still struggles when the payload grows or wind gusts become stronger. With the AI layer added, the drone maintains much smaller attitude errors, recovers faster after disturbances, and avoids driving its motors to their limits as often, even when the arm swings with payloads up to several hundred grams.
What this means for future flying helpers
In simple terms, the study shows that giving a drone a sense of its own future problems makes it far better at keeping its balance while working in the air. By combining a solid geometric controller with an AI predictor that learns how the arm and payload will disturb the flight, the system can stay stable, waste less energy, and carry out more precise tasks. This hybrid strategy could help enable practical aerial robots that inspect structures, pick up samples, or assist in emergencies, all while safely using robotic arms in windy, uncertain real-world conditions.
Citation: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
Keywords: aerial manipulation, UAV robotic arm, geometric control, AI control, disturbance rejection