Clear Sky Science · ru
Улучшённое управление ориентацией на основе ИИ для БПЛА с роботизированной рукой для компенсации возмущений
Летающие роботы, которые умеют работать руками
Представьте дрон, который не только видит, но и может протянуть руку, захватить и манипулировать объектами, оставаясь при этом безопасно в воздухе. В этом исследовании показано, как сочетание летательного робота с роботизированной рукой и интеллектуальной системой управления на базе искусственного интеллекта может сделать таких воздушных помощников устойчивыми и надёжными даже при ветре и при переносе сдвигающихся грузов.
Почему установка руки на дрон настолько сложна
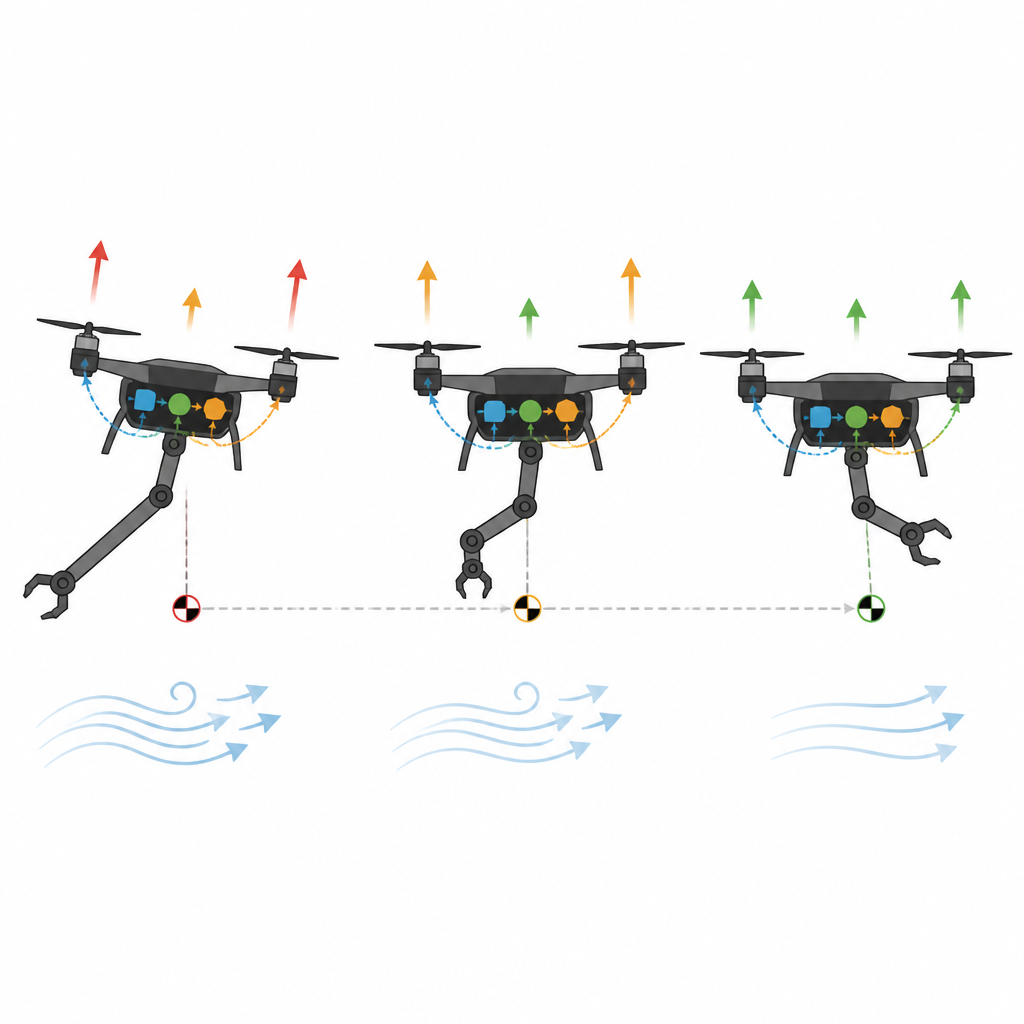
Когда дрон несёт роботизированную руку, каждое её движение меняет равновесие всего аппарата в воздухе. По мере того как рука раскачивается или поднимает объект, смещается центр масс дрона, появляются дополнительные силы, и порывы ветра могут усугубить ситуацию. Традиционные методы управления, хорошо работающие для простого полёта и съёмки, испытывают трудности с такими быстрыми нелинейными изменениями. Это может приводить к раскачиванию, медленному восстановлению или даже потере управления, когда рука движется быстро или несёт более тяжёлые грузы. Задача — удерживать дрон ровным и на курсе, пока прикреплённая рука ведёт себя как подвижная, непредсказуемая нагрузка.

Новый взгляд на баланс в воздухе
Авторы опираются на современный подход, называемый геометрическим управлением, который описывает ориентацию дрона непосредственно в трёхмерном пространстве вместо использования угловых приближений, способных становиться запутанными или неустойчивыми. Эта математическая база даёт надёжные гарантии того, что дрон можно управлять плавно и без тех странностей, которые преследуют более простые схемы. На основе этого они разработали собственный дрон HANA-26 из лёгкого углепластика с трёхсуставной роботизированной рукой, установленной ближе к центру масс. Используя подробные компьютерные модели как летательной платформы, так и манипулятора, они моделируют, как меняются силы, моменты и распределение масс при движении руки и при воздействии ветра или различных грузов.
Позволить ИИ предсказывать будущие возмущения
Даже очень хороший закон управления может дать сбой, если он не знает, что произойдёт дальше. Чтобы решить эту проблему, команда добавляет уровень искусственного интеллекта на базе рекуррентной нейронной сети типа LSTM. Эта сеть обучена на десятках тысяч примеров из симуляций и реальных полётов, включающих разные положения руки, полезные нагрузки и синтетические порывы ветра. Её задача — предсказывать дополнительные крутящие моменты и смещения равновесия, которые появятся через короткое время по мере движения руки. Эти предсказания затем объединяются с показаниями датчиков в шаге слияния, схожем с фильтром Калмана. В результате получается чистая оценка того, как дрон будет возмущён, которая подаётся в геометрический контроллер как аккуратно ограниченная коррекция, не заменяя при этом базовые безопасные законы управления.
Как ведёт себя интеллектуальный контроллер в испытаниях
Чтобы проверить, действительно ли этот подход помогает, исследователи сравнивают три стратегии: стандартный PID-регулятор, геометрический контроллер без ИИ и их геометрический контроллер с усилением ИИ. Они испытывают их в высокоточной симуляции, соединяющей MATLAB с CoppeliaSim, и в реальных экспериментах с HANA-26 при зависании, движениях руки и работе с грузами в закрытых и открытых помещениях. PID-регулятор показывает приемлемую работу при лёгких нагрузках, но демонстрирует сильные колебания и медленное затухание при быстрых движениях руки или более тяжёлых массах. Чистое геометрическое управление улучшает устойчивость и уменьшает раскачивание, но всё ещё испытывает трудности при увеличении полезной нагрузки или усилении порывов ветра. С добавленным уровнем ИИ дрон поддерживает значительно меньшие ошибки ориентации, быстрее восстанавливается после возмущений и реже доводит двигатели до предельных нагрузок, даже когда рука раскачивается с грузами до нескольких сотен граммов.
Что это значит для будущих летающих помощников
Проще говоря, исследование показывает, что способность дрона предвидеть собственные будущие проблемы делает его гораздо лучше в поддержании равновесия при работе в воздухе. Объединяя надёжный геометрический контроллер с предиктором на базе ИИ, который учится тому, как рука и полезная нагрузка будут нарушать полёт, система может оставаться стабильной, тратить меньше энергии и выполнять более точные задачи. Эта гибридная стратегия может помочь создать практичные воздушные роботы для осмотров конструкций, сбора образцов или помощи в чрезвычайных ситуациях, при этом безопасно используя роботизированные руки в ветреных и неопределённых реальных условиях.
Цитирование: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
Ключевые слова: аэрообслуживание, манипулятор для БПЛА, геометрическое управление, управление ИИ, подавление возмущений