Clear Sky Science · nl
Verbeterde geometrische sturing met AI voor UAV's met een robotarm ter compensatie van storingen
Vliegende robots die hun handen kunnen gebruiken
Stel je een drone voor die niet alleen kan zien, maar ook kan reiken, grijpen en voorwerpen manipuleren terwijl hij veilig in de lucht blijft. Deze studie laat zien hoe het combineren van een vliegende robot met een robotarm, en het voorzien van een slimme besturing met kunstmatige intelligentie, zulke luchtassistenten stabiel en betrouwbaar kan maken, zelfs bij wind en bij het dragen van verschuivende ladingen.
Waarom een arm op een drone zo lastig is
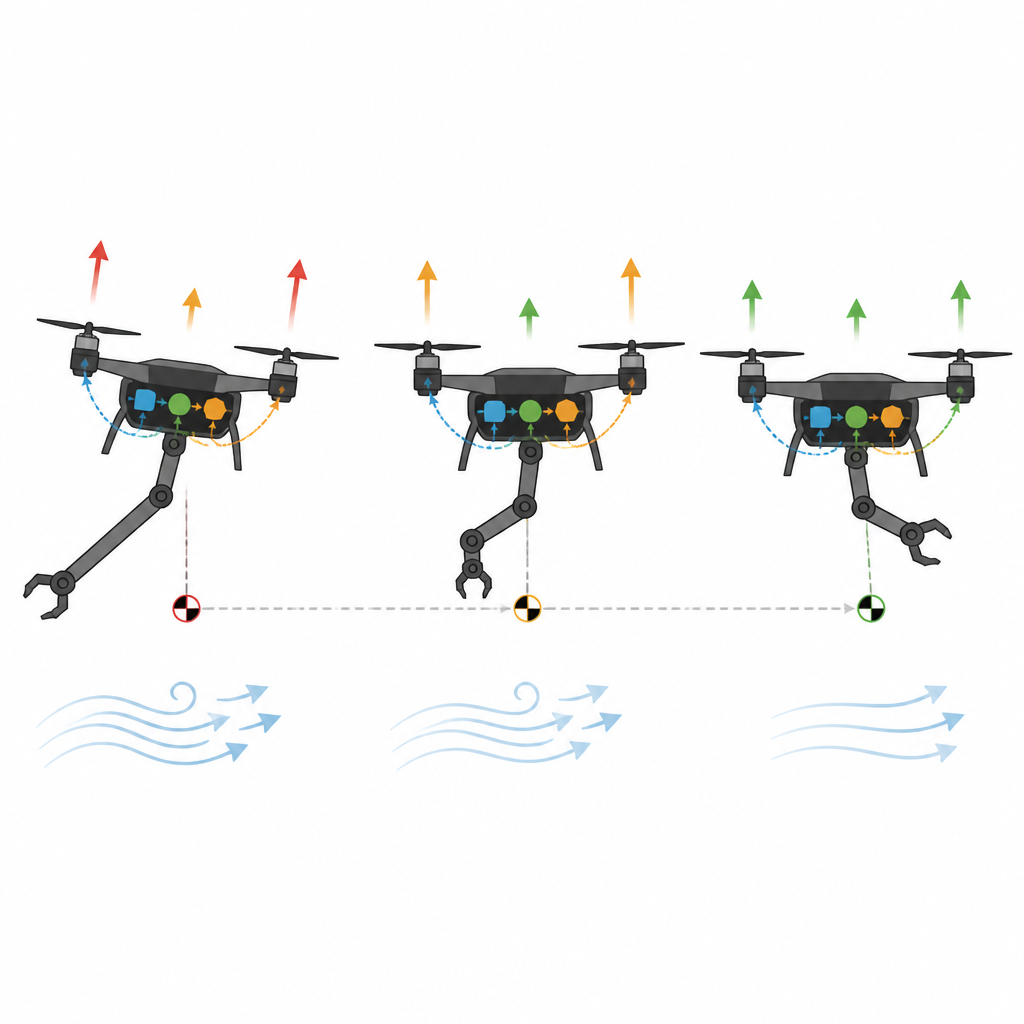
Wanneer een drone een robotarm draagt, verandert elke beweging van die arm de balans van het hele toestel in de lucht. Terwijl de arm zwaait of een voorwerp optilt, verschuift het massamiddelpunt van de drone, verschijnen er extra krachten en kunnen windstoten alles verergeren. Traditionele regelmethoden, die goed werken voor eenvoudige vluchten en fotografie, hebben moeite met deze snelle, niet-lineaire veranderingen. Ze kunnen leiden tot wiebelen, trage herstelreacties of zelfs verlies van controle wanneer de arm snel beweegt of zwaardere ladingen hanteert. De uitdaging is de drone vlak en op koers te houden terwijl de aangebouwde arm zich gedraagt als een bewegende, onvoorspelbare last.

Een nieuwe manier om balans in de lucht te benaderen
De auteurs bouwen voort op een moderne aanpak genaamd geometrische sturing, die de oriëntatie van de drone rechtstreeks in de driedimensionale ruimte beschrijft in plaats van te vertrouwen op hoekbenaderingen die verwarrend of instabiel kunnen worden. Dit wiskundige kader biedt sterke garanties dat de drone soepel en zonder de gebruikelijke eigenaardigheden van eenvoudigere schema’s kan worden gestuurd. Daarbovenop ontwerpen ze een op maat gemaakte drone, HANA-26, gemaakt van lichtgewicht koolstofvezel, met een driegewrichtige robotarm gemonteerd dicht bij het massamiddelpunt van de drone. Met gedetailleerde computermodellen voor zowel het vliegende platform als de arm simuleren ze hoe krachten, koppels en massaverdeling evolueren wanneer de arm beweegt en wanneer de drone door wind wordt getroffen of verschillende gewichten draagt.
De AI laten voorspellen wat de volgende storing wordt
Zelfs een zeer goede regelschakeling kan falen als hij niet weet wat er gaat gebeuren. Om dit aan te pakken, voegen de onderzoekers een laag kunstmatige intelligentie toe op basis van een type recurrent neuraal netwerk genaamd LSTM. Dit netwerk wordt getraind op tienduizenden voorbeelden uit simulaties en echte vluchten, inclusief verschillende armposities, ladingen en synthetische windstoten. Zijn taak is de extra draaiende krachten en verschuivingen in de balans te voorspellen die zich een korte tijd in de toekomst zullen voordoen naarmate de arm beweegt. Deze voorspellingen worden vervolgens samengevoegd met live-sensormetingen in een fusiestap vergelijkbaar met een Kalman-filter. Het resultaat is een zuivere schatting van hoe de drone verstoord zal worden, die als een zorgvuldig begrensde correctie in de geometrische controller wordt gevoed, zonder de onderliggende veilige regels te vervangen.
Hoe de slimme controller zich in tests gedraagt
Om te onderzoeken of deze aanpak echt helpt, vergelijken de onderzoekers drie strategieën: een standaard PID-controller, een geometrische controller zonder AI, en hun AI-versterkte geometrische controller. Ze testen deze in een hoog-fideliteitsimulator die MATLAB koppelt aan CoppeliaSim, en in echte experimenten met HANA-26 bij het hoveren, armbewegingen en het hanteren van vracht in binnen- en buitenomgevingen. De PID-controller werkt acceptabel voor lichte lasten maar vertoont sterke oscillaties en trage stabilisatie wanneer de arm snel beweegt of zwaardere massa’s draagt. Pure geometrische sturing verbetert de stabiliteit en vermindert het wiebelen, maar heeft nog steeds moeite wanneer de lading toeneemt of windstoten sterker worden. Met de toegevoegde AI-laag houdt de drone veel kleinere houdingafwijkingen, herstelt hij sneller na storingen en voorkomt hij dat de motoren zo vaak tot hun limiet worden gedreven, zelfs wanneer de arm zwaait met ladingen tot enkele honderden grammen.
Wat dit betekent voor toekomstige vliegende helpers
In eenvoudige termen toont de studie dat het geven van een drone een gevoel voor zijn eigen toekomstige problemen hem veel beter maakt in het behouden van balans tijdens het werken in de lucht. Door een degelijke geometrische controller te combineren met een AI-voorspeller die leert hoe de arm en de lading de vlucht zullen verstoren, kan het systeem stabiel blijven, minder energie verspillen en nauwkeurigere taken uitvoeren. Deze hybride strategie zou praktische luchtrobots kunnen mogelijk maken die structuren inspecteren, monsters oppakken of bijstaan in noodgevallen, terwijl ze veilig robotarmen gebruiken in winderige, onzekere omstandigheden in de echte wereld.
Bronvermelding: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
Trefwoorden: luchtmanipulatie, UAV robotarm, geometrische sturing, AI-sturing, storingsonderdrukking