Clear Sky Science · ja
撹乱を補償するロボットアームを備えたUAV向け、AIで強化された幾何学的制御
手を使える飛行ロボット
視覚だけでなく手を伸ばして物を掴み操作でき、空中で安全に留まれるドローンを想像してください。本研究は、飛行ロボットにロボットアームを組み合わせ、人工知能を用いた賢い制御システムを与えることで、風や変動する荷重下でもこうした空のヘルパーを安定かつ信頼できるものにできることを示しています。
なぜドローンにアームを付けるのが難しいのか
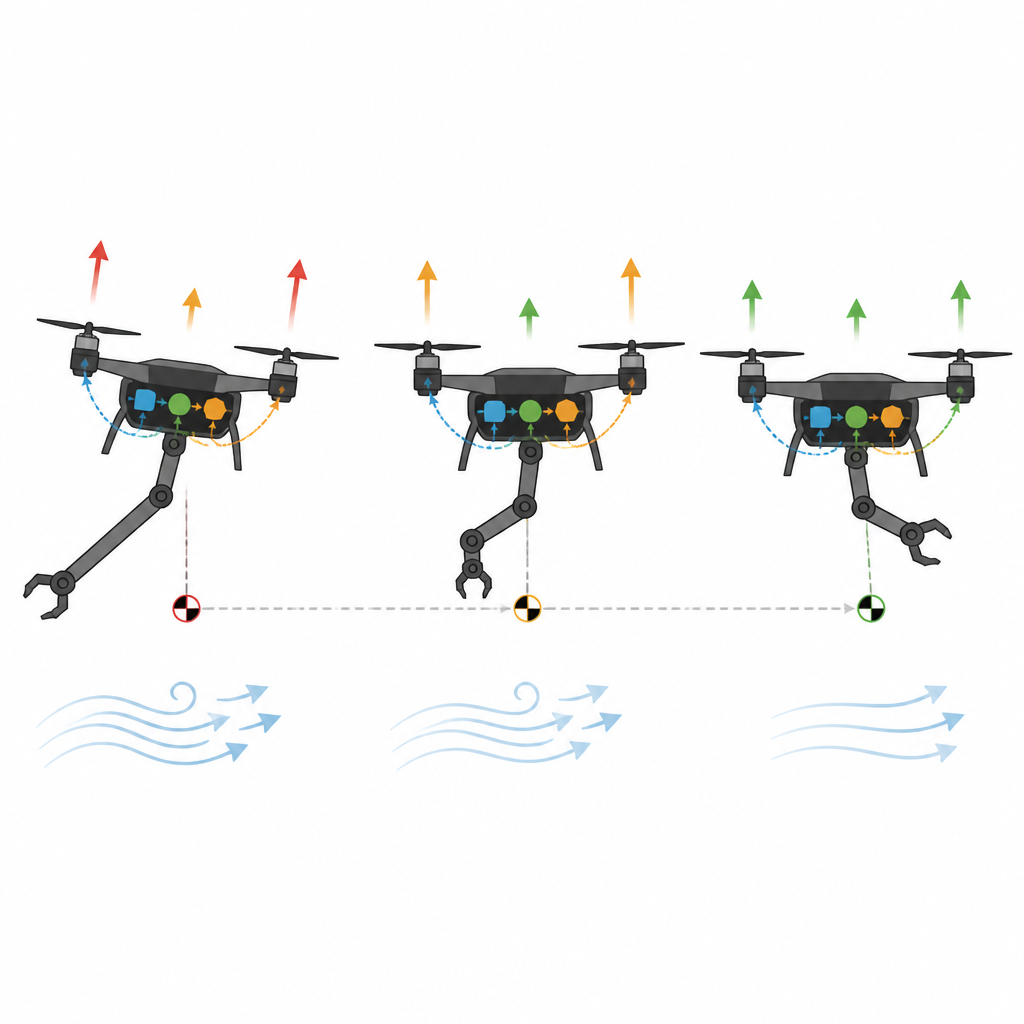
ドローンにロボットアームを搭載すると、アームの各動作が機体全体の空中での釣り合いを変化させます。アームが振れたり物を持ち上げたりすると、重心が移動し、余分な力やトルクが生じ、突風が状況を悪化させることもあります。写真撮影などの単純な飛行で有効な従来の制御手法は、これらの急速で非線形な変化に対応しにくく、揺れ、回復の遅れ、あるいはアームが急速に動くか重い荷重を扱う際に制御を失うことがあります。課題は、取り付けられたアームが移動する予測困難な荷重のように振る舞う中で、機体を水平に保ち目標軌道に沿わせることです。

空中での姿勢を考える新しい方法
著者らは、姿勢を角度の近似に頼らず三次元空間で直接記述する現代的手法である幾何学的制御に基づいて構築します。この数学的枠組みは、より単純な方式に見られる特有の不具合なしに滑らかに機体を操縦できるという強い保証を与えます。これに加えて、彼らは軽量のカーボンファイバー製で、三関節のロボットアームを重心近傍に搭載したカスタム機体HANA-26を設計しています。飛行プラットフォームとアームの詳細なコンピュータモデルを用いて、アームの動きや風、異なる積載により力・トルク・質量分布がどのように変化するかをシミュレーションします。
次に来る撹乱をAIに予測させる
非常に優れた制御則であっても、何が起こるかを知らなければ失敗することがあります。これに対処するため、チームはLSTMと呼ばれる一種の再帰型ニューラルネットワークに基づく人工知能層を追加しました。このネットワークは、アームの位置、搭載物、合成突風などを含むシミュレーションと実飛行からの数万件の事例で訓練されています。その役割は、アームの動きに伴って短時間先に現れる追加のねじれ力や釣り合いの変化を予測することです。これらの予測はカルマンフィルタに似た融合ステップで実際のセンサー読み値と組み合わされます。結果として得られるのは、ドローンにどのような撹乱が生じるかの精緻な推定であり、それが基礎となる安全な制御則を置き換えることなく、慎重に制限された補正として幾何学的制御器に入力されます。
テストでスマート制御器はどう振る舞うか
この手法が本当に有効かを確認するため、研究者らは3つの戦略を比較しました:標準的なPID制御、AIなしの幾何学的制御、そしてAI強化型の幾何学的制御です。これらをMATLABとCoppeliaSimを連携させた高忠実度シミュレータと、屋内外環境でホバリング、アーム操作、搭載物の取り扱いを行うHANA-26の実機実験で試験しました。PID制御は軽荷重では許容できる性能を示しましたが、アームが素早く動くか重い物を扱うと強い振動と収束の遅さを示しました。純粋な幾何学的制御は安定性を改善し揺れを減らしましたが、搭載物が重くなるか突風が強くなる状況では依然苦戦しました。AI層を追加すると、姿勢誤差が大幅に小さくなり、撹乱後の回復が速くなり、アームが数百グラムの搭載物を振る場合でもモータを限界まで駆動する頻度が減少しました。
将来の空中ヘルパーにとっての意義
簡潔に言えば、本研究はドローンに将来起こりうる問題を予見させることで、空中で作業する際の安定性が格段に向上することを示しています。堅牢な幾何学的制御と、アームや搭載物が飛行に与える撹乱を学習して予測するAIを組み合わせることで、システムは安定を保ち、エネルギーの無駄を減らし、より精密な作業を実行できます。このハイブリッド戦略は、構造物の点検、サンプル回収、緊急支援などで実用的な空中ロボットがロボットアームを安全に使い、風や不確実な現実環境下で作業することを後押しする可能性があります。
引用: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
キーワード: 空中操作, UAV ロボットアーム, 幾何学的制御, AI 制御, 撹乱拒否