Clear Sky Science · it
Controllo geometrico avanzato potenziato dall’IA per UAV con un braccio robotico per compensare le perturbazioni
Robot volanti che sanno usare le mani
Immaginate un drone che non solo vede, ma è in grado di allungare una mano, afferrare e manipolare oggetti rimanendo sicuro in volo. Questo studio mostra come l’accoppiamento di un robot volante con un braccio robotico, supportato da un sistema di controllo intelligente basato sull’intelligenza artificiale, possa rendere questi assistenti aerei stabili e affidabili anche in presenza di vento e carichi che si spostano.
Perché mettere un braccio su un drone è così complesso
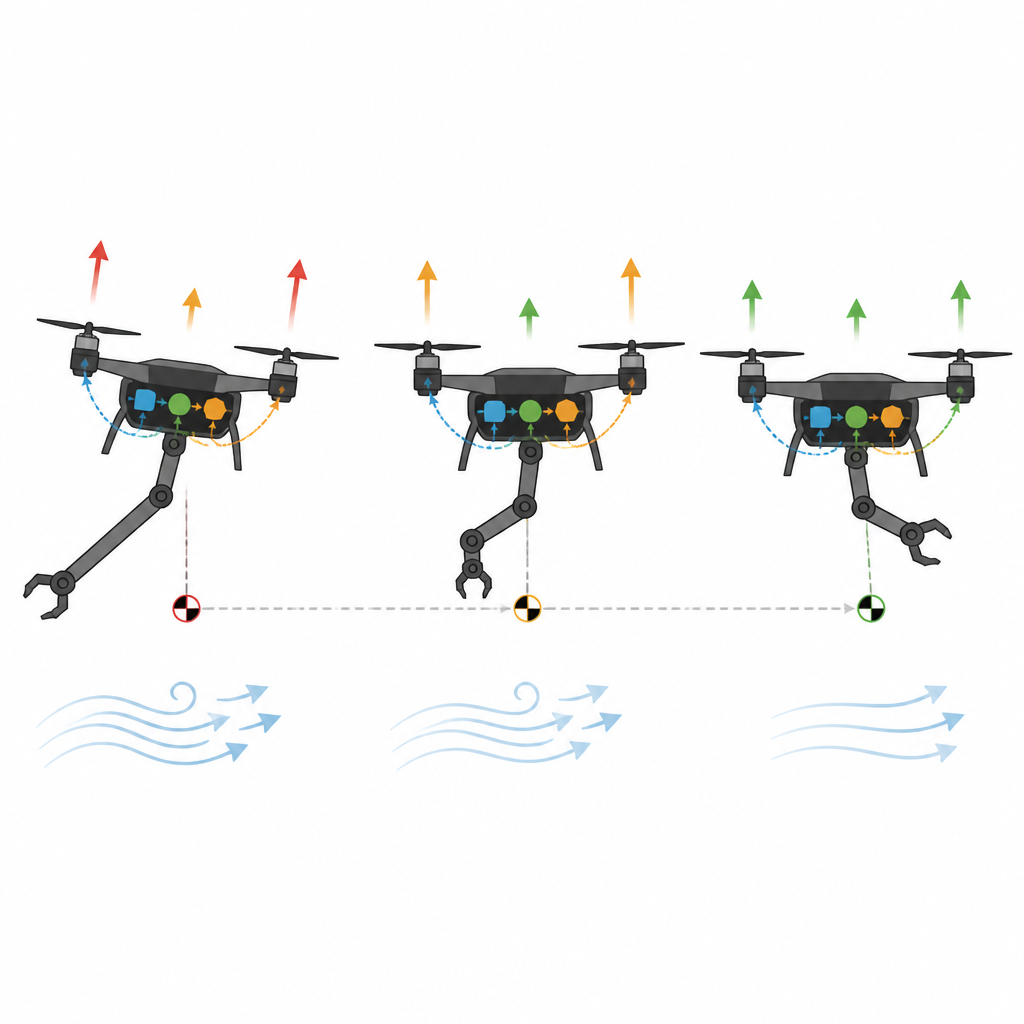
Quando un drone porta con sé un braccio robotico, ogni movimento di quel braccio modifica l’equilibrio dell’intero mezzo in aria. Man mano che il braccio oscilla o solleva un oggetto, il baricentro si sposta, compaiono forze aggiuntive e raffiche di vento possono aggravare la situazione. I metodi di controllo tradizionali, efficaci per il volo semplice e la fotografia, faticano con questi cambiamenti rapidi e non lineari. Possono causare oscillazioni, recuperi lenti o persino perdita di controllo quando il braccio si muove rapidamente o gestisce carichi pesanti. La sfida è mantenere il drone livellato e sulla traiettoria desiderata mentre il braccio montato si comporta come un carico mobile e imprevedibile.

Un nuovo modo di pensare all’equilibrio in volo
Gli autori partono da un approccio moderno chiamato controllo geometrico, che descrive l’orientamento del drone direttamente nello spazio tridimensionale invece di fare affidamento su scorciatoie angolari che possono diventare confuse o instabili. Questo quadro matematico fornisce solide garanzie che il drone può essere governato in modo fluido e senza i difetti tipici degli schemi più semplici. Su questa base progettano un drone personalizzato, HANA-26, realizzato in fibra di carbonio leggera, con un braccio robotico a tre giunti montato vicino al centro di massa del drone. Usando modelli al computer dettagliati sia per la piattaforma volante sia per il braccio, simulano come forze, coppie e distribuzione di massa evolvono quando il braccio si muove e quando il drone è colpito dal vento o trasporta pesi diversi.
Lasciare che l’IA indovini la prossima perturbazione
Anche una legge di controllo molto buona può fallire se non conosce in anticipo cosa sta per accadere. Per affrontare questo problema, il team aggiunge un livello di intelligenza artificiale basato su una rete neurale ricorrente chiamata LSTM. Questa rete è stata addestrata su decine di migliaia di esempi tratti da simulazioni e voli reali, includendo diverse posizioni del braccio, payload e raffiche di vento sintetiche. Il suo compito è prevedere le coppie torcenti addizionali e gli spostamenti di equilibrio che appariranno nel breve termine mentre il braccio si muove. Queste previsioni vengono poi fuse con le letture dei sensori in tempo reale in una fase di integrazione simile a un filtro di Kalman. Il risultato è una stima pulita di come il drone verrà disturbato, che viene alimentata nel controllore geometrico come correzione opportunamente limitata, senza sostituire le leggi di controllo sottostanti e sicure.
Come si comporta il controllore intelligente nei test
Per verificare l’efficacia dell’approccio, i ricercatori confrontano tre strategie: un controllore PID standard, un controllore geometrico senza IA e il loro controllore geometrico potenziato con IA. Li testano in un simulatore ad alta fedeltà che collega MATLAB con CoppeliaSim, e in esperimenti reali con HANA-26 eseguendo hovering, movimenti del braccio e gestione dei carichi in ambienti indoor e outdoor. Il controllore PID funziona accettabilmente con carichi leggeri ma mostra forti oscillazioni e tempi di assestamento lunghi quando il braccio si muove rapidamente o trasporta masse maggiori. Il controllo geometrico puro migliora la stabilità e riduce le oscillazioni, ma fatica ancora quando il payload aumenta o le raffiche di vento diventano più intense. Con l’aggiunta dello strato IA, il drone mantiene errori di assetto molto più piccoli, recupera più velocemente dopo le perturbazioni ed evita di portare i motori ai limiti così spesso, anche quando il braccio oscilla con carichi fino a diverse centinaia di grammi.
Cosa significa per i futuri assistenti volanti
In termini semplici, lo studio dimostra che dare a un drone la facoltà di prevedere i propri problemi futuri lo rende molto più capace nel mantenere l’equilibrio mentre lavora in aria. Combinando un solido controllore geometrico con un predittore IA che impara come il braccio e il carico perturbano il volo, il sistema può rimanere stabile, consumare meno energia ed eseguire compiti con maggiore precisione. Questa strategia ibrida potrebbe contribuire a rendere pratici robot aerei che ispezionano strutture, raccolgono campioni o assistono nelle emergenze, utilizzando in sicurezza bracci robotici in condizioni reali ventose e incerte.
Citazione: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
Parole chiave: manipolazione aerea, UAV con braccio robotico, controllo geometrico, controllo IA, reiezione delle perturbazioni