Clear Sky Science · tr
Bozulmaları telafi eden robotik kola sahip İHA’lar için yapay zekâ destekli geliştirilmiş geometri kontrolü
Elleri olan uçan robotlar
Görmenin ötesine geçip uzanabilen, tutabilen ve havadayken nesnelerle etkileşime girebilen bir drone’u hayal edin. Bu çalışma, bir uçan robotu bir robotik kol ile eşleştirmenin ve ona yapay zekâ destekli akıllı bir kontrol sistemi vermenin, rüzgâr ve kaygan yükler altında bile bu hava yardımcılarını dengeli ve güvenilir kılabileceğini gösteriyor.
Drone’a kol takmanın neden bu kadar zor olduğu
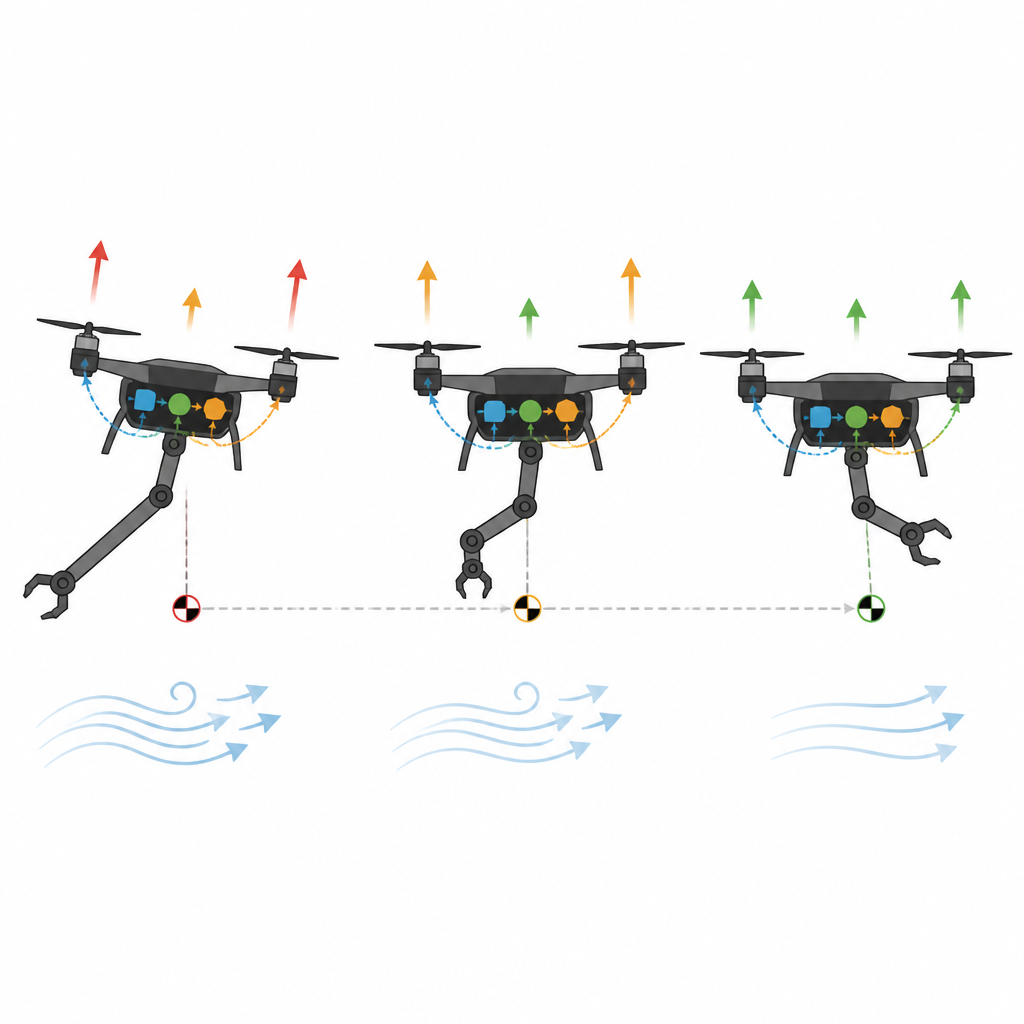
Bir drone robotik kola sahip olduğunda, kolun her hareketi tüm makinenin havadaki dengesini değiştirir. Kol sallanıp bir nesneyi kaldırdıkça drone’un kütle merkezi kayar, ek kuvvetler ortaya çıkar ve rüzgâr cebirleri durumu daha da kötüleştirebilir. Basit uçuş ve fotoğrafçılık için iyi çalışan geleneksel kontrol yöntemleri, bu hızlı, doğrusal olmayan değişikliklerle başa çıkmakta zorlanır. Bunlar sallanma, yavaş toparlanma veya kol hızlı hareket ettiğinde ya da daha ağır yükler taşındığında kontrol kaybına yol açabilir. Zorluk, bağlı kol hareket ederken drone’u düz ve hedefinde tutmaktır; kol hareketleri öngörülemez, hareketli bir yük gibi davranır.

Havada dengeyi yeniden düşünmek
Yazarlar, drone’un yönelimini açısal kestirmelere dayanmadan doğrudan üç boyutlu uzayda tanımlayan modern bir yaklaşım olan geometrik kontrol üzerine inşa ediyor. Bu matematiksel çerçeve, drone’un daha basit şemaların takıldığı tuhaflıklara kapılmadan düzgün bir şekilde yönlendirilebileceğine dair güçlü garantiler verir. Bunun üzerine, hafif karbon fiberden yapılmış, kütle merkezine yakın bir yerde üç eklemli robotik kola sahip özel bir drone olan HANA-26’yı tasarlıyorlar. Uçuş platformu ve kol için ayrıntılı bilgisayar modelleri kullanarak, kol hareket ettiğinde ve drone rüzgâra maruz kaldığında kuvvetlerin, torkların ve kütle dağılımının nasıl evrildiğini simüle ediyorlar.
Yapay zekânın bir sonraki bozulmayı tahmin etmesine izin vermek
Çok iyi bir kontrol yasası bile ileriye dair bilgi sahibi değilse tökezleyebilir. Bunu ele almak için ekip, LSTM adı verilen tekrarlayan bir sinir ağı türüne dayanan bir yapay zekâ katmanı ekliyor. Bu ağ, farklı kol pozisyonları, yükler ve yapay rüzgâr patlamaları dahil olmak üzere simülasyonlar ve gerçek uçuşlardan on binlerce örnek üzerinde eğitiliyor. Ağın görevi, kol hareket ettikçe kısa süre içinde ortaya çıkacak ekstra burulma kuvvetlerini ve denge kaymalarını tahmin etmek. Bu tahminler daha sonra Kalman filtresine benzer bir füzyon adımında canlı sensör okumaları ile harmanlanıyor. Sonuç, drone’un nasıl bozulacağını gösteren temiz bir tahmin oluyor; bu tahmin, temel güvenli kontrol yasalarının yerini almadan, dikkatle sınırlanmış bir düzeltme olarak geometrik kontrolöre veriliyor.
Akıllı kontrolörün testlerde nasıl davrandığı
Bu yaklaşımın gerçekten işe yarayıp yaramadığını görmek için araştırmacılar üç stratejiyi karşılaştırıyor: standart bir PID kontrolör, yapay zekâsız geometrik kontrol ve yapay zekâ ile güçlendirilmiş geometrik kontrol. Bunları MATLAB ile CoppeliaSim’i bağlayan yüksek doğruluklu bir simülatörde ve HANA-26 ile kapalı ve açık alanda hover, kol hareketleri ve yük taşıma deneyleriyle gerçek denemelerde test ediyorlar. PID kontrolör hafif yüklerde kabul edilebilir çalışırken, kol hızlı hareket ettiğinde veya daha ağır kütleler taşındığında güçlü salınımlar ve yavaş yerleşme gösteriyor. Saf geometrik kontrol stabiliteyi iyileştirip sallanmayı azaltıyor, ancak yük arttıkça veya rüzgâr patlamaları güçlendiğinde hâlâ zorlanıyor. Yapay zekâ katmanı eklendiğinde drone, tutum hatalarında çok daha küçük değerler tutuyor, bozulmalardan sonra daha hızlı toparlanıyor ve kol yüzlerce grama kadar yüklerle sallansa bile motorlarını sınırlarına daha az sık sürüklüyor.
Gelecekteki uçan yardımcılar için ne ifade ediyor
Basitçe söylemek gerekirse, çalışma bir drone’a kendi gelecekteki sorunlarını sezme yetisi vermenin, onun havada çalışırken dengesini korumasını çok daha iyi hale getirdiğini gösteriyor. Sağlam bir geometrik kontrolör ile kolun ve yükün uçuşu nasıl bozacağını öğrenen bir yapay zekâ öngörücüsünü birleştirerek sistemin daha stabil, enerji açısından daha verimli ve daha hassas görevler gerçekleştirebilir hale geldiği gösteriliyor. Bu hibrit strateji, yapısal denetimler, örnek toplama veya acil durumlara yardım gibi uygulamaları; rüzgârlı, belirsiz gerçek dünya koşullarında robotik kolları güvenle kullanarak mümkün kılabilir.
Atıf: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
Anahtar kelimeler: hava aracı ile manipülasyon, İHA robotik kolu, geometrik kontrol, yapay zekâ kontrolü, bozulma reddi