Clear Sky Science · sv
Förbättrad geometrikontroll med AI för UAV:er med en robotarm som kompenserar störningar
Flygande robotar som kan använda händerna
Föreställ dig en drönare som inte bara kan se utan också sträcka ut sig, gripa och manipulera föremål samtidigt som den håller sig tryggt i luften. Denna studie visar hur kombinationen av en flygande robot och en robotarm, tillsammans med ett smart styrsystem drivet av artificiell intelligens, kan göra sådana luftburna assistenter stabila och pålitliga även i vind och vid förskjutna laster.
Varför det är så knepigt att sätta en arm på en drönare
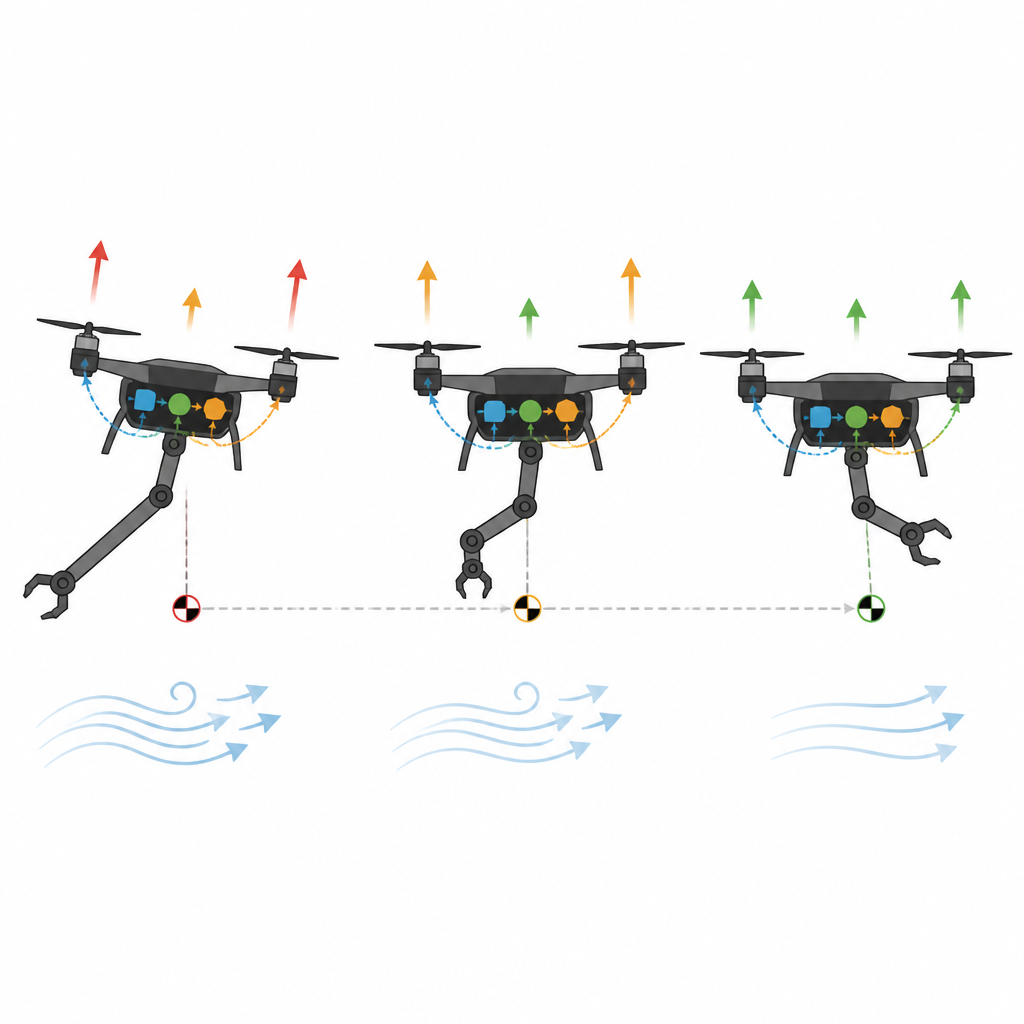
När en drönare bär en robotarm förändrar varje rörelse i armen hur hela farkosten balanserar i luften. När armen svänger eller lyfter ett föremål förskjuts drönarens tyngdpunkt, extra krafter uppstår och vindbyar kan förvärra situationen. Traditionella styrmetoder, som fungerar väl för enkel flygning och fotografering, har svårt med dessa snabba, icke-linjära förändringar. De kan leda till vinglighet, långsam återhämtning eller till och med kontrollförlust när armen rör sig snabbt eller hanterar tyngre laster. Utmaningen är att hålla drönaren jämn och på kurs medan dess monterade arm beter sig som en rörlig, oförutsägbar last.

Ett nytt sätt att tänka kring balans i luften
Författarna bygger vidare på en modern metod kallad geometrisk kontroll, som beskriver drönarens orientering direkt i tredimensionellt rum istället för att förlita sig på vinkelgenvägar som kan bli förvirrande eller instabila. Detta matematiska ramverk ger starka garantier för att drönaren kan styras smidigt och utan de vanliga egenheterna som plågar enklare scheman. Ovanpå detta konstruerar de en specialdrönare, HANA-26, tillverkad i lätt kolfiber, med en treledad robotarm monterad nära drönarens tyngdpunkt. Med detaljerade datormodeller för både flygplattformen och armen simulerar de hur krafter, moment och massfördelning utvecklas när armen rör sig och när drönaren utsätts för vind eller bär olika laster.
Låta AI gissa nästa störning
Även en mycket bra kontrollregel kan svikta om den inte vet vad som är på väg att hända. För att möta detta lägger teamet till ett artificiellt intelligenslager baserat på en typ av rekurrentt neuralt nätverk kallat LSTM. Detta nätverk tränas på tiotusentals exempel från simuleringar och verkliga flygningar, inklusive olika armpositioner, nyttolaster och syntetiska vindbyar. Dess uppgift är att förutsäga de extra vridkrafter och balansförskjutningar som kommer att uppträda en kort stund in i framtiden när armen rör sig. Dessa förutsägelser blandas sedan med live-sensordata i ett fusionssteg liknande en Kalman-filter. Resultatet är en ren uppskattning av hur drönaren kommer att störas, vilken matas in i den geometriska regulatorn som en noggrant begränsad korrigering, utan att ersätta de underliggande säkra styrreglerna.
Så beter sig den smarta regulatorn i tester
För att avgöra om detta tillvägagångssätt verkligen hjälper jämför forskarna tre strategier: en standard PID-regulator, en geometrisk regulator utan AI och deras AI-förstärkta geometriska regulator. De testar dem i en högfidelitetssimulator som kopplar MATLAB till CoppeliaSim, och i verkliga experiment med HANA-26 som utför hovring, armrörelser och lasthantering i inomhus- och utomhusmiljöer. PID-regulatorn fungerar acceptabelt för lätta laster men visar kraftiga oscillationer och långsam dämpning när armen rör sig snabbt eller bär tyngre massor. Ren geometrisk kontroll förbättrar stabiliteten och minskar slingret, men har fortfarande svårigheter när nyttolasten ökar eller vindbyarna blir starkare. Med AI-lagret tillsatt håller drönaren avsevärt mindre attitydfel, återhämtar sig snabbare efter störningar och undviker att mata motorerna till deras gränser lika ofta, även när armen svänger med laster upp till flera hundra gram.
Vad detta betyder för framtida flygande assistenter
Enkelt uttryckt visar studien att ge en drönare en känsla för sina egna framtida problem gör den mycket bättre på att hålla balansen medan den arbetar i luften. Genom att kombinera en robust geometrisk regulator med en AI-prediktor som lär sig hur armen och lasten kommer att störa flygningen kan systemet förbli stabilt, slösa mindre energi och utföra mer precisa uppgifter. Denna hybrida strategi kan bidra till att möjliggöra praktiska luftburna robotar som inspekterar konstruktioner, plockar upp prover eller bistår vid nödsituationer, samtidigt som de säkert använder robotarmar i blåsiga, osäkra verkliga förhållanden.
Citering: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
Nyckelord: luftburen manipulering, UAV robotarm, geometrisk kontroll, AI-styrning, störningsavvisning