Clear Sky Science · he
שליטה גיאומטרית משופרת המונעת על ידי בינה מלאכותית עבור כלי טיס ללא טייס עם זרוע רובוטית לפיצוי הפרעות
רובוטים מעופפים שיכולים להשתמש ב׳ידיים׳
דמיינו רחפן שלא רק רואה אלא גם מושיט יד, תופס ומניפול דברים תוך שהוא נשאר באוויר בבטחה. המחקר הזה מראה כיצד שילוב של רובוט מעופף עם זרוע רובוטית, והצבת מערכת בקרה חכמה מונעת בינה מלאכותית, יכולים להפוך עוזרים מעופפים כאלה ליציבים ואמינים אפילו ברוחות ובזמן נשיאת משקלים משתנים.
מדוע הצבת זרוע על רחפן כל כך מורכבת
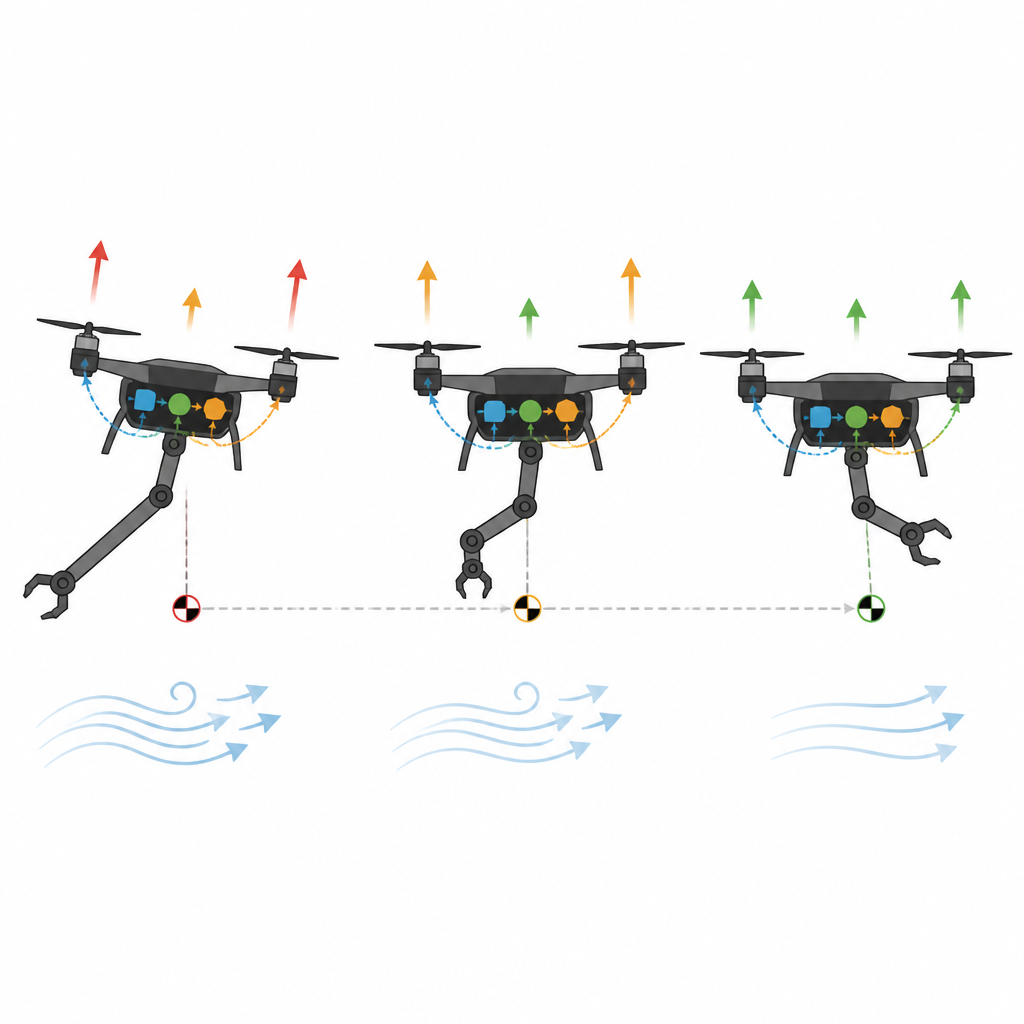
כאשר רחפן נושא זרוע רובוטית, כל תנועה של אותה זרוע משנה את האופן שבו הכללית מאזנת באוויר. כשהזרוע מתנודדת או מרימה חפץ, מרכז המסה של הרחפן זז, מופעים כוחות נוספים, ושבבי רוח עלולים להחריף את המצב. שיטות בקרה מסורתיות, שעובדות היטב לטיסה פשוטה ולצילום, מתקשות עם השינויים המהירים ולא-לינאריים האלה. הן עלולות לגרום להתנדנדות, להתאוששות איטית או אפילו לאובדן שליטה כאשר הזרוע נעה במהירות או מטפלת במטען כבד יותר. האתגר הוא לשמור על הרחפן מפולס ובמסלול בזמן שהזרוע המצורפת מתנהגת כמו עומס נע ובלתי צפוי.

דרך חדשה לחשוב על איזון באוויר
המחברים מפתחים גישה מודרנית הנקראת בקרה גיאומטרית, שמתארת את כיוון הרחפן ישירות במרחב תלת־ממדי במקום להסתמך על קיצורי זוויות שיכולים להפוך למבלבלים או בלתי יציבים. המסגרת המתמטית הזו נותנת הבטחות חזקות שניתן לנווט את הרחפן בצורה חלקה וללא הגחמות שמטרידות סכמות פשוטות יותר. בנוסף לכך, הם תכננו רחפן מותאם בשם HANA-26, עשוי מסיבי פחמן קלים, עם זרוע רובוטית בת שלוש מפרקים המותקנת קרוב למרכז המסה של הרחפן. באמצעות מודלים מפורטים במחשב הן של הפלטפורמה המעופפת והן של הזרוע, הם מדמים כיצד כוחות, מומנטים והתפלגות מסה מתפתחים כאשר הזרוע נעה וכשהרחפן נתקל ברוח או נושא משקלים שונים.
לתת לבינה לנחש את ההפרעה הבאה
אפילו חוק בקרה טוב עלול להיכשל אם הוא לא יודע מה עומד להתרחש. כדי להתמודד עם זאת, הצוות מוסיף שכבת בינה מלאכותית מבוססת רשת עצבית חוזרת מסוג LSTM. רשת זו מאומנת בעשרות אלפי דוגמאות מתוך סימולציות וטיסות אמיתיות, כולל מצבי זרוע שונים, מטענים וזעמי רוח סינתטיים. תפקידה לחזות את הכוחות המסתלסלים הנוספים ואת הזזות האיזון שיתגלו במרווח זמן קצר בעתיד כאשר הזרוע נעה. תחזיות אלה ואז מתמזגות עם קריאות חיישנים בזמן אמת בשלב מיזוג דומה למסנן קלמן. התוצאה היא אומדן נקי של האופן שבו הרחפן יופרע, שאותו מזינים אל הבקר הגיאומטרי כתיקון מוגבל בקפידה, מבלי להחליף את חוקי הבקרה הבטוחים שבבסיס.
כיצד הבקר החכם מתנהג במבחנים
כדי לבחון האם הגישה הזאת באמת עוזרת, החוקרים משווים שלוש אסטרטגיות: בקר PID סטנדרטי, בקרה גיאומטרית ללא בינה מלאכותית והבקר הגיאומטרי המשופר בבינה מלאכותית שלהם. הם בודקים אותן בסימולטור בר־דיוק גבוה המקשר בין MATLAB ל־CoppeliaSim, ובניסויים אמיתיים עם HANA-26 המבצע ציפה במקום, תנועות זרוע וטיפול במטענים בסביבות פנימיות וחיצוניות. בקר ה־PID פועל מקובל עבור משקלים קלים אך מראה תנודות חזקות והתייצבות איטית כשהזרוע נעה במהירות או נושאת מסת גדולה יותר. בקרה גיאומטרית טהורה משפרת את היציבות ומפחיתה את ההתנדנדות, אך עדיין מתקשה כאשר המטען גדל או זעמי הרוח מתחזקים. עם הוספת שכבת הבינה המלאכותית, הרחפן משמור על שגיאות תנוחה קטנות יותר, מתאושש מהר יותר לאחר הפרעות ומנמיך את התנהלות המנועים לשיאים לעתים רחוקות יותר, אפילו כאשר הזרוע מתנודדת עם מטענים עד כמה מאות גרמים.
מה המשמעות של זה לעוזרים מעופפים בעתיד
במלים פשוטות, המחקר מראה שהענקת תחושה של בעיות עתידיות לרחפן משפרת באופן משמעותי את יכולתו לשמור על שיווי משקל בזמן העבודה באוויר. על ידי שילוב של בקרה גיאומטרית איתנה עם חזה צפייה מבוסס למידה שמנבא כיצד הזרוע והמטען יפריעו לטיסה, המערכת יכולה להישאר יציבה, לבזבז פחות אנרגיה ולבצע משימות מדויקות יותר. אסטרטגיה היברידית זו עשויה לסייע לאפשר רובוטים מעופפים מעשיים שיבצעו בדיקות מבנים, יאספו דגימות או יסייעו בחירום, וכל זאת תוך שימוש בטוח בזרועות רובוטיות בתנאי רוח ואי־ודאות בעולם האמיתי.
ציטוט: Oqda, K., El-Gendy, E.M., Marie, H.S. et al. Enhanced geometry control powered by AI for UAVS with a robotic arm for compensating for disturbances. Sci Rep 16, 15989 (2026). https://doi.org/10.1038/s41598-026-52048-y
מילות מפתח: מניפולציה אווירית, זרוע רובוטית לכלי טיס, בקרה גיאומטרית, בקרת בינה מלאכותית, דחיית הפרעות