Clear Sky Science · zh
优化机器人摇摆宽度改善冷金属传输WAAM中4043铝合金的显微组织与力学性能
用智能机器人运动打造更好的金属零件
增材制造,常称为3D打印,正从塑料小件向用于航空、汽车和能源系统的大型金属部件迈进。本研究考察了一个非常实用的问题:当焊接机器人通过“摇摆”来逐层构建铝制墙体时,摇摆的横向宽度应当是多少,才能制造出既坚固可靠又高效的零件?答案对在实际零件中权衡生产速度、内部结构与安全性至关重要。
为什么铝墙需要新的制造方式
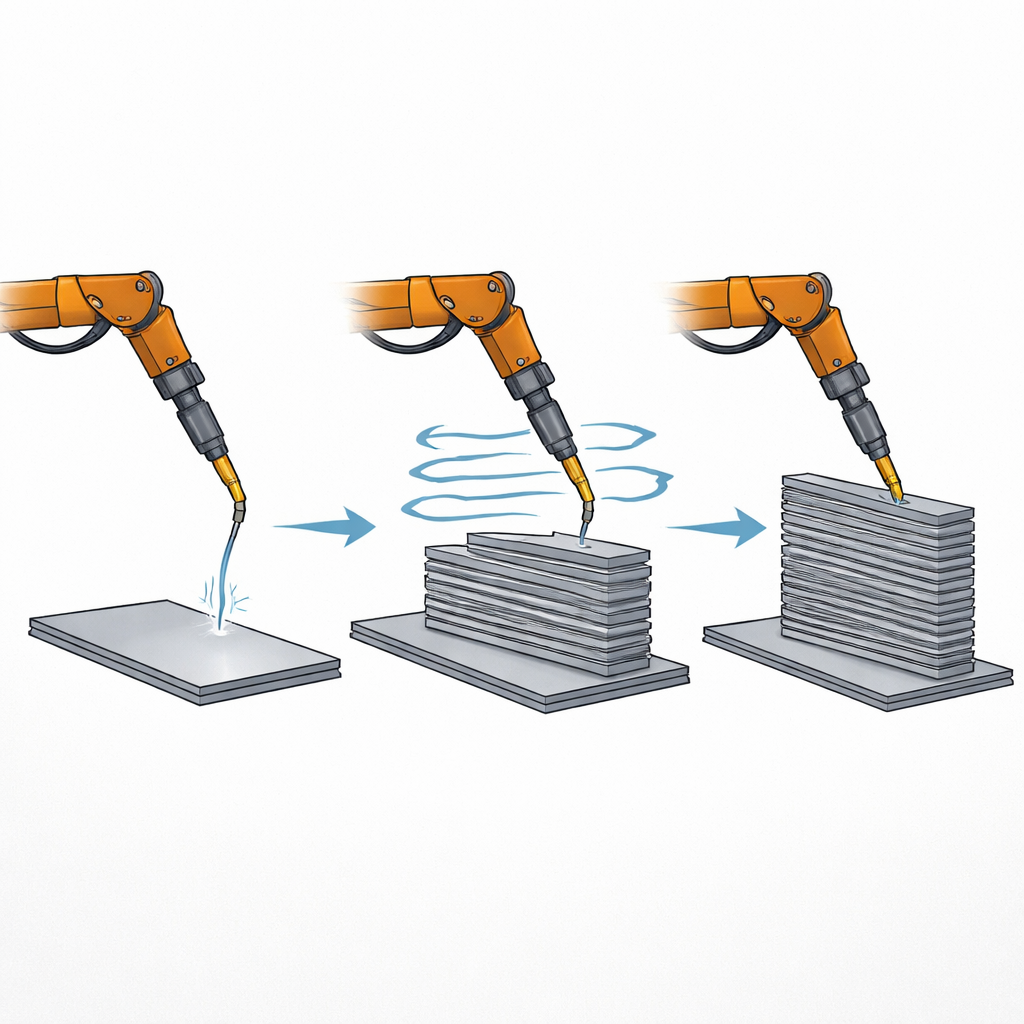
铝合金因其轻质、高强度和耐腐蚀而备受青睐,广泛用于飞机、车辆和海上设备。传统铸造和锻造在需要大尺寸且形状复杂的零件时常显得力不从心,而一些基于激光的3D打印技术则因铝对光的反射性和高导热性而面临挑战。焊丝-电弧增材制造提供了另一条路径:机器人臂将金属焊丝送入电弧中,以堆叠熔融金属道的方式成形零件。在此工作中,研究团队采用了一种更温和的电弧焊形式——冷金属传输(CMT),其热输入低、飞溅少,尤其适合铝材加工。他们聚焦于常用且易加工的4043铝合金,探讨机器人横向摇摆宽度如何影响成品墙体的晶粒结构与力学性能。
测试窄、中、宽三种机器人轨迹
研究者用三种摇摆宽度构建了约20层的薄铝墙:4毫米(窄)、6毫米(中)和8毫米(宽)。层间他们严格控制温度,暂停焊接直至墙体冷却至低于100°C,以抑制热量积累。随后从墙体的顶部、中部和底部切取样品,用光学和电子显微镜、X射线衍射以及晶取向与晶粒尺寸绘图技术进行观察。他们还测量了从底部到顶部的硬度,并沿行进方向与纵向(构建方向)拉伸试验,以评估材料的强度、延展性及各向异性差异。
摇摆如何改变内部金属组织
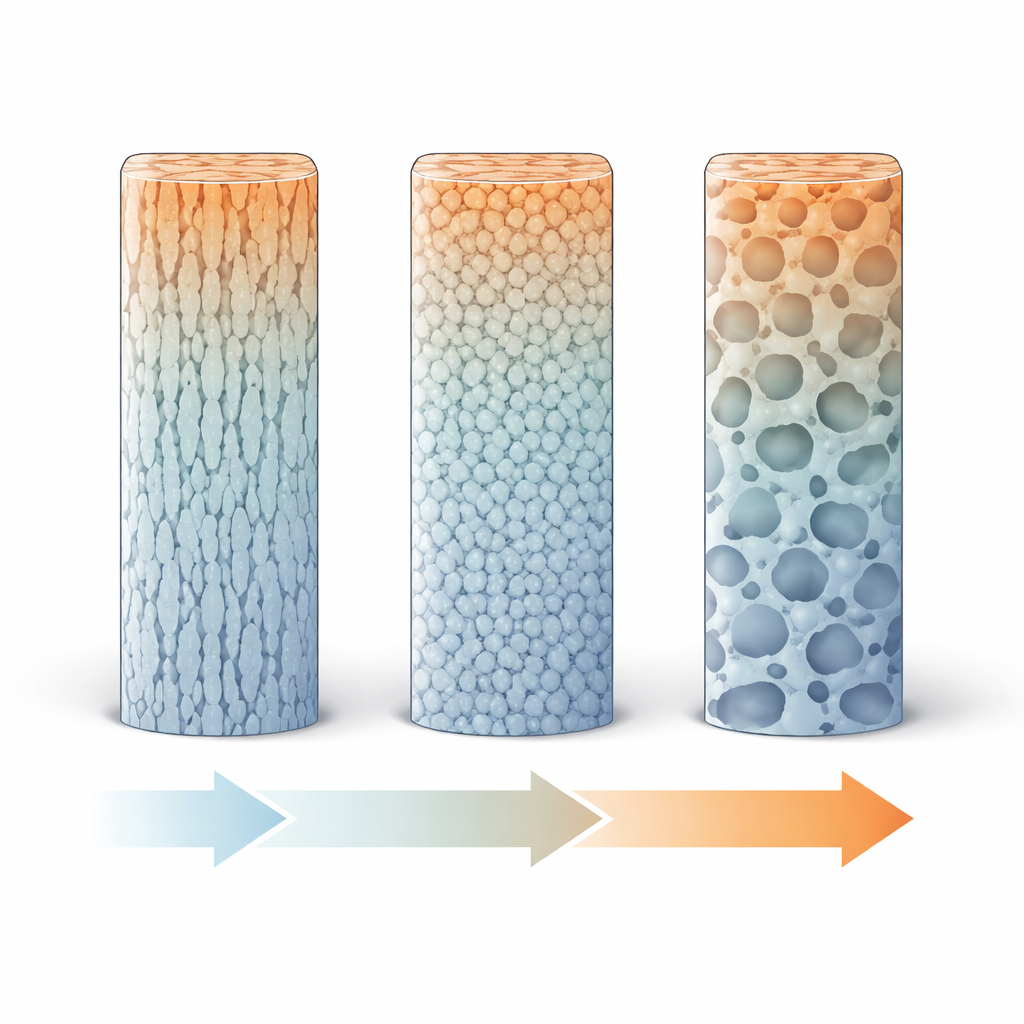
在所有摇摆宽度下,合金均含有相同的基本组分:富铝区域被富硅通道包围,呈树枝状(树枝晶)排列。随摇摆宽度变化的是这些模式的尺寸与形态。更宽的摇摆增大了每层暴露的表面积,使其冷却更快。从4毫米扩展到6毫米时,这种额外的冷却细化了内部晶粒与树枝晶,将粗厚的板状特征打散为更细小的形态组合,从而更能阻止裂纹扩展。进一步增至8毫米虽可进一步细化晶粒,但也促使更多圆润的球状组织与孔隙形成,这些特征对阻止裂纹不利。通过全高度的温度控制,该工艺使结构从底到顶相对均匀,有别于许多焊接构建件中性能随高度大幅变化的现象。
强度、伸长与方向性平衡
在力学测试中,三种摇摆宽度均能产出具有合理硬度与延性的铝材,但出现了重要差异。平均硬度变化不大,然而硬度自底到顶的波动取决于摇摆宽度,反映出晶粒尺寸与硬质硅相之间的平衡变化。拉伸试验显示,中等的6毫米摇摆提供了特别理想的组合:在行进方向与构建方向上都具有良好的强度与较高的伸长率,并且两者之间的差异最小。相比之下,最宽的8毫米摇摆降低了延性,尤其在纵向表现更差,并使断裂行为偏向兼具韧性与脆性特征。断口表面证实了这一点:4毫米和6毫米样品主要以微小凹坑失效,典型的韧性撕裂特征;而8毫米样品出现更多孔洞与准解理特征,表明材料更不宽容。
对实际零件的意义
对旨在用焊丝电弧打印大型铝部件的工程师而言,本研究表明机器人摇摆宽度并非仅是一个编程细节——它是决定冷却、内部组织及最终性能的重要调节参数。本研究中约6毫米的中等摇摆在效率与强度、延性及各向异性一致性之间提供了最佳折衷:既提高了构建效率,又保持了结构的韧性与稳定性。简单来说,摇摆过小或过大可能分别导致组织过于粗糙或引入有害特征,而中间值有助于合金“冻结”成细小且坚韧的网络。配合层间的精确温控,这为快速制造且结构可靠的大型铝零件提供了实用方案。
引用: Liu, S., Sun, Y., Yuan, X. et al. Optimizing robot weaving width improves the microstructure and mechanical performance of 4043 aluminum alloy in CMT-WAAM. Sci Rep 16, 14005 (2026). https://doi.org/10.1038/s41598-026-43670-x
关键词: 电弧焊丝增材制造, 铝合金, 机器人摇摆, 冷金属传输, 显微组织