Clear Sky Science · es
Optimizar el ancho de tejido robótico mejora la microestructura y el comportamiento mecánico de la aleación de aluminio 4043 en CMT-WAAM
Construir piezas metálicas mejores con un movimiento robótico inteligente
La fabricación aditiva, frecuentemente llamada impresión 3D, está avanzando desde pequeñas piezas de plástico hacia grandes componentes metálicos para aviones, automóviles y sistemas energéticos. Este estudio aborda una cuestión muy práctica: cuando un robot de soldadura "teje" de un lado a otro para construir muros de aluminio capa a capa, ¿qué ancho debe tener ese movimiento de tejido para producir piezas que sean resistentes, fiables y rápidas de fabricar? La respuesta resulta crucial para equilibrar la velocidad, la estructura interna y la seguridad en componentes del mundo real.
Por qué los muros de aluminio necesitan una nueva forma de construirse
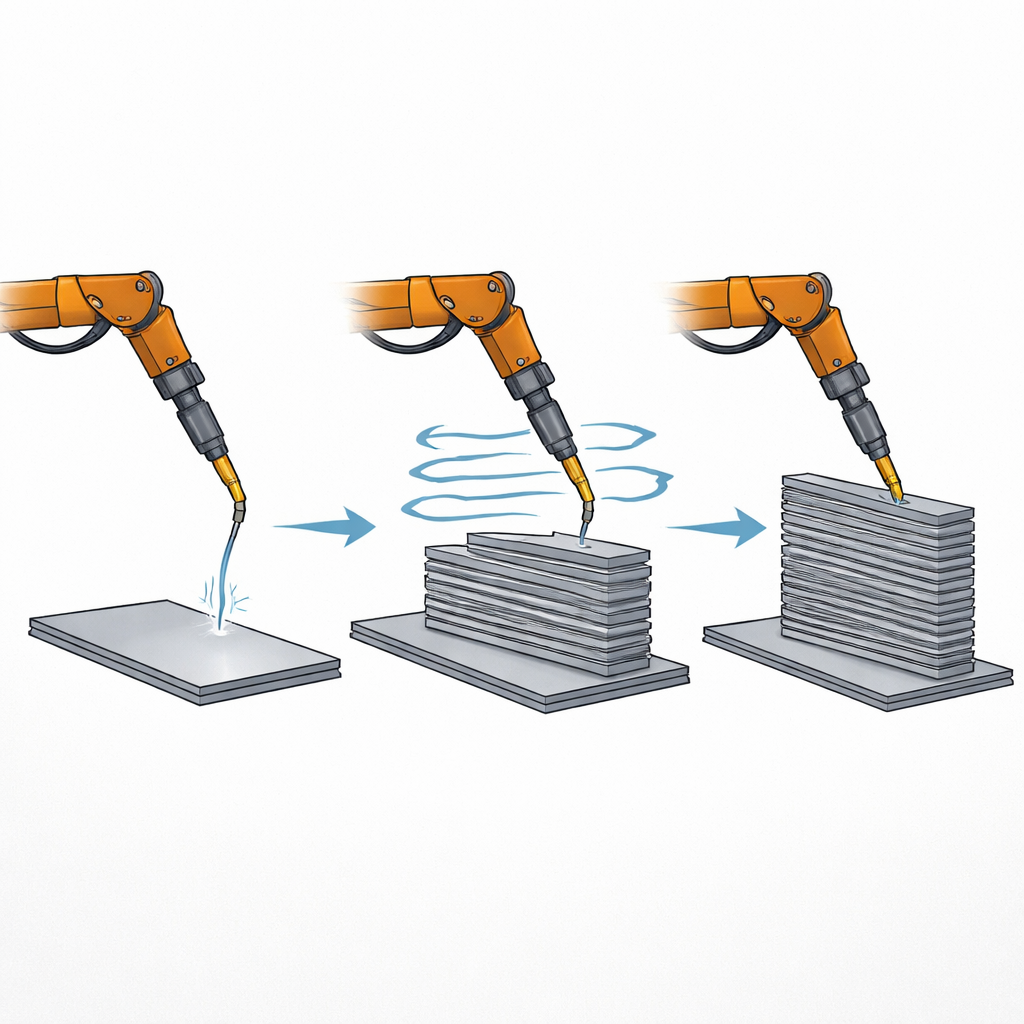
Las aleaciones de aluminio son valoradas porque son ligeras, resistentes y resistentes a la corrosión, lo que las hace ideales para aeronaves, vehículos y equipos en alta mar. Los métodos tradicionales como la fundición y el forjado tienen limitaciones cuando las piezas deben ser grandes y de geometrías complejas, y algunas técnicas láser de impresión 3D tienen problemas por la tendencia del aluminio a reflejar la luz y conducir el calor. La fabricación aditiva por arco de alambre ofrece una vía alternativa: un brazo robótico alimenta un alambre metálico en un arco eléctrico, depositando metal fundido en cordones apilados para formar una pieza. En este trabajo, el equipo usó una versión más suave de la soldadura por arco llamada transferencia de metal en frío, que deposita metal con baja energía térmica y salpicaduras mínimas, adecuada para aluminio. Se centraron en la aleación de aluminio 4043, un material común y fácil de procesar, y preguntaron cómo el ancho de tejido lateral del robot afecta el patrón interno de granos y el comportamiento mecánico del muro acabado.
Probando recorridos robóticos estrechos, medios y anchos
Los investigadores construyeron muros delgados de aluminio de aproximadamente 20 capas de altura usando tres anchos de tejido: 4 milímetros (estrecho), 6 milímetros (medio) y 8 milímetros (ancho). Entre capas, controlaron cuidadosamente la temperatura, esperando hasta que el muro se enfriara por debajo de 100 °C para mantener bajo control la acumulación de calor. Luego cortaron muestras de la parte superior, media e inferior de los muros y las examinaron con microscopía óptica y electrónica, difracción de rayos X y una técnica que cartografía las orientaciones cristalinas y el tamaño de grano. También midieron la dureza de abajo arriba y realizaron ensayos de tracción en la dirección de avance y en la dirección de construcción vertical para evaluar la resistencia y la ductilidad del material, y cuánto diferían según la dirección.
Cómo el tejido cambia el metal por dentro
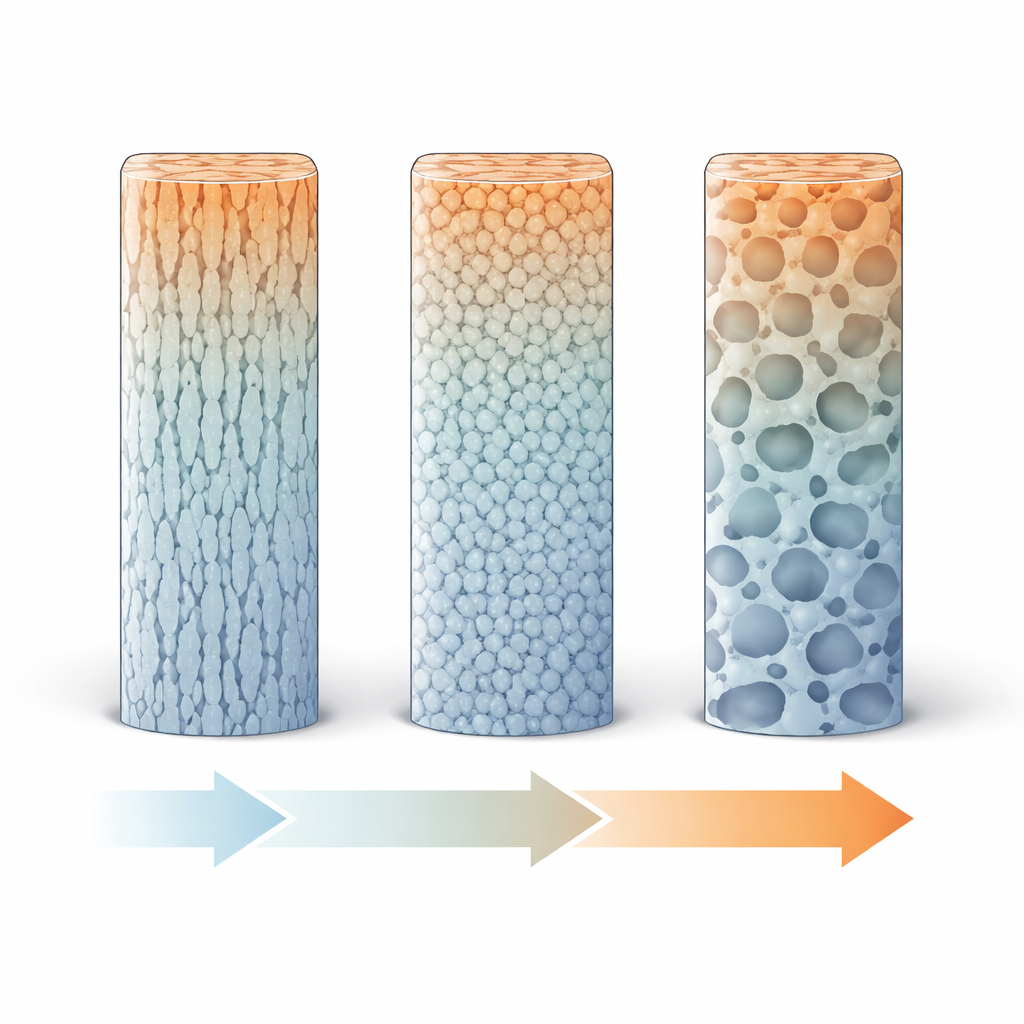
En todos los anchos de tejido, la aleación contenía los mismos componentes básicos: regiones ricas en aluminio rodeadas por canales ricos en silicio, dispuestas en un patrón dendrítico similar a un árbol. Lo que cambió con el ancho de tejido fue el tamaño y la forma de estos patrones. Un tejido más amplio aumenta el área superficial expuesta de cada capa, permitiendo que se enfríe más rápido. Al pasar de 4 a 6 milímetros, este enfriamiento adicional refinó los granos y las dendritas internas, fragmentando características gruesas y laminares en una mezcla más fina de formas que resisten mejor el crecimiento de grietas. Al aumentar el ancho hasta 8 milímetros, los granos se refinaron aún más, pero también se favorecieron estructuras más redondeadas y globulares y la aparición de poros, que son menos eficaces para detener grietas. A lo largo de la altura del muro, el control deliberado de la temperatura mantuvo la estructura relativamente uniforme de abajo arriba, a diferencia de muchas piezas construidas por soldadura donde las propiedades varían mucho con la altura.
Resistencia, alargamiento y equilibrio direccional
En las pruebas, los tres anchos de tejido produjeron aluminio con dureza y ductilidad razonables, pero surgieron diferencias importantes. La dureza promedio cambió poco, sin embargo su variación de abajo arriba dependió del ancho de tejido, reflejando el equilibrio cambiante entre el tamaño de grano y las partículas duras de silicio. Los ensayos de tracción mostraron que el tejido medio de 6 milímetros ofreció una combinación especialmente atractiva: buena resistencia y una elongación relativamente alta en ambas direcciones (de avance y de construcción), junto con la menor diferencia entre esas direcciones. En contraste, el tejido más amplio de 8 milímetros redujo la ductilidad, especialmente en vertical, y desplazó el comportamiento de fractura hacia una mezcla de rasgos dúctiles y frágiles. Las superficies de fractura confirmaron este panorama: a 4 y 6 milímetros, el metal falló principalmente por pequeños hoyuelos, típico del desgarro dúctil, mientras que a 8 milímetros aparecieron más poros y características de cuasi-clivaje, señales de un material menos tolerante.
Qué implica esto para piezas del mundo real
Para los ingenieros que buscan imprimir en 3D grandes componentes de aluminio con alambre y arco, este trabajo demuestra que el ancho de tejido del robot no es solo un detalle de programación: es un control potente que modela la solidificación, la estructura interna y, en última instancia, el rendimiento. Un tejido moderado de aproximadamente 6 milímetros ofreció el mejor compromiso en este estudio, mejorando la eficiencia de construcción mientras preservaba la resistencia, la ductilidad y la uniformidad en diferentes direcciones. En términos sencillos, tejer demasiado poco o demasiado puede dejar el metal demasiado grueso o introducir características dañinas, pero un tejido intermedio ayuda a que la aleación "congele" una red fina y resistente. Combinado con un control térmico cuidadoso entre capas, esto proporciona una receta práctica para fabricar piezas grandes de aluminio que sean rápidas de producir y estructuralmente fiables.
Cita: Liu, S., Sun, Y., Yuan, X. et al. Optimizing robot weaving width improves the microstructure and mechanical performance of 4043 aluminum alloy in CMT-WAAM. Sci Rep 16, 14005 (2026). https://doi.org/10.1038/s41598-026-43670-x
Palabras clave: fabricación aditiva por arco de alambre, aleación de aluminio, tejido robótico, transferencia de metal en frío, microestructura