Clear Sky Science · ja
ロボット織り幅を最適化するとCMT-WAAMにおける4043アルミ合金の微細構造と機械的特性が改善される
賢いロボット動作で金属部品をより良く作る
付加製造、いわゆる3Dプリントは、プラスチック製の小物から航空機、自動車、エネルギー設備向けの大型金属部品へと広がりつつあります。本研究は非常に実用的な問いに取り組みます:溶接ロボットがアルミニウムの壁を層ごとに“織る”ように往復させる際、その横方向の織り幅は部品を強く、信頼性高く、かつ迅速に製造するためにどれくらいが適切か?その答えは、速度、内部構造、安全性のバランスを取る上で極めて重要であることがわかりました。
なぜアルミの壁は新しい作り方を必要とするのか
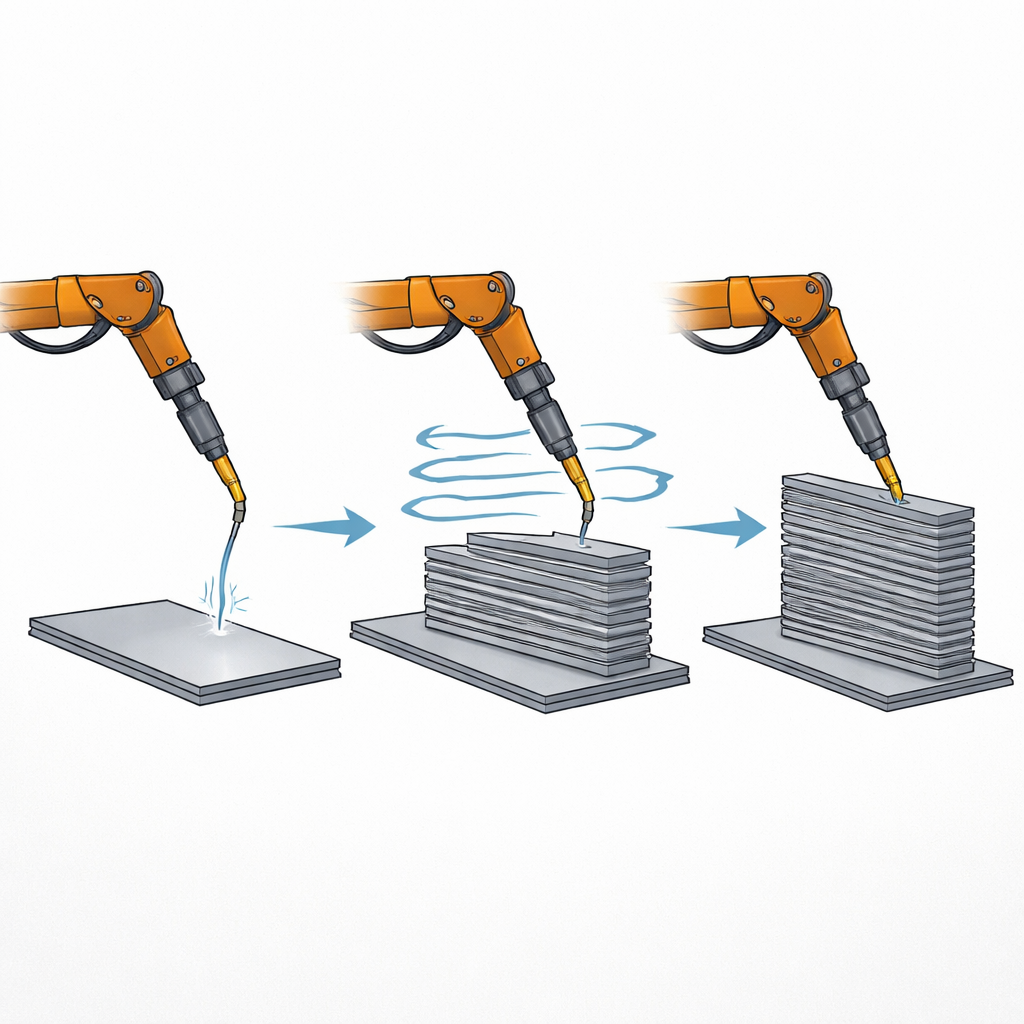
アルミニウム合金は軽量で強く、耐食性にも優れるため、航空機、車両、オフショア機器に最適です。鋳造や鍛造のような従来法は、大型かつ複雑形状の部品を扱うのが難しく、レーザー系の一部3Dプリント技術はアルミの反射性や高い熱伝導性に悩まされます。ワイヤーアーク積層造形(WAAM)は別の道を示します:ロボットアームが金属ワイヤを電弧に送り込み、溶融金属を積層して部品を形成します。本研究では、熱入力が低くスパッタも少ない“コールドメタルトランスファー(CMT)”という穏やかなアーク溶接法を使用し、アルミに適した条件で進めました。対象は加工性の良い一般的な4043アルミ合金で、ロボットの横方向織り幅が完成した壁の結晶組織(粒子配列)と機械的特性にどのように影響するかを検討しました。
狭い・中間・広いロボット経路を比較する試験
研究者たちは高さ約20層の薄いアルミ壁を、3種類の織り幅で作製しました:4ミリ(狭い)、6ミリ(中間)、8ミリ(広い)。層間では温度を厳密に管理し、壁が100℃以下に冷えるまで待機して熱蓄積を抑えました。次に壁の上部・中部・下部から試料を取り出し、光学顕微鏡や電子顕微鏡、X線回折、結晶方位や粒径をマッピングする手法で観察しました。底部から上部までの硬さも測定し、移動方向(走行方向)と積層方向(垂直方向)で引張試験を行い、強度・延性・方向性の違いを評価しました。
織り幅が内部金属組織に与える影響
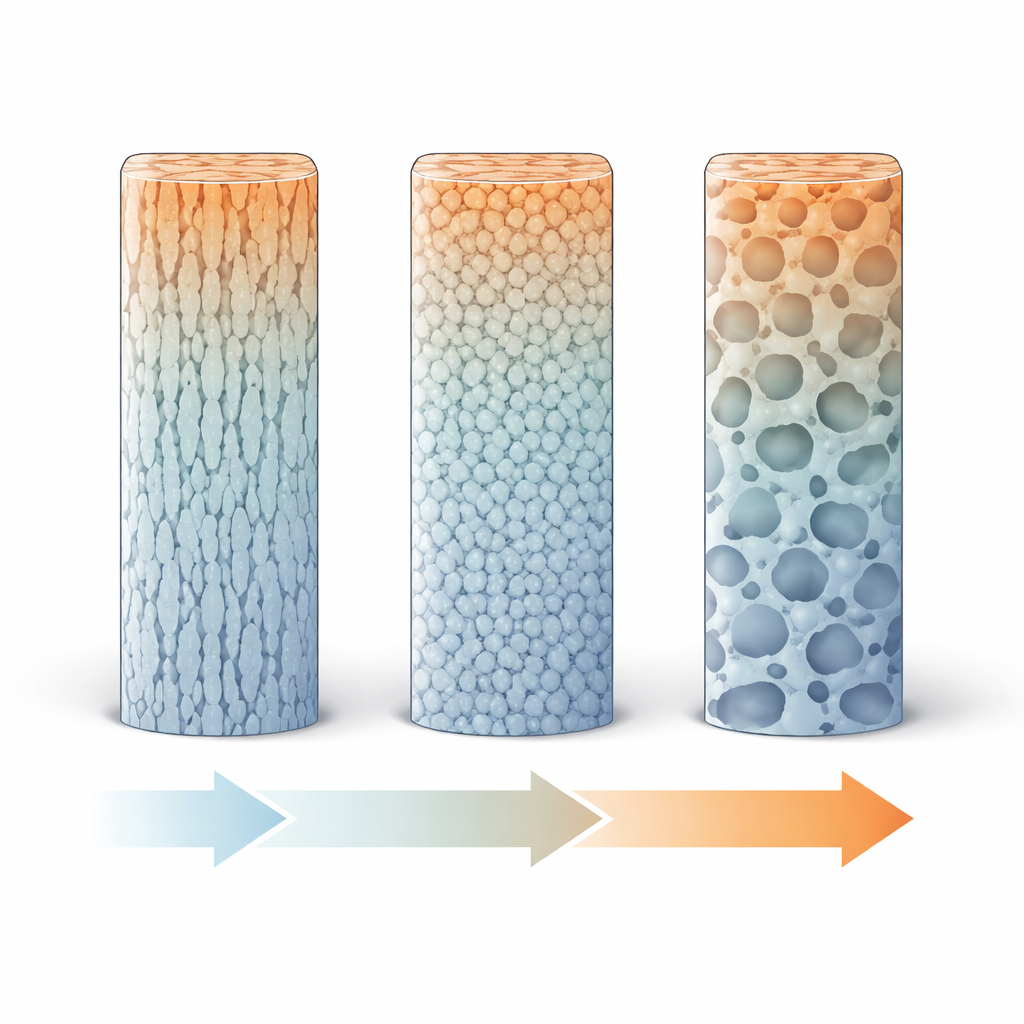
どの織り幅でも、合金は同じ基本的な構成を示しました:アルミ豊富相の周りにシリコン豊富相が樹枝状(デンドライト)に配列しています。織り幅によって変わったのはこれらの模様の大きさと形状です。織り幅が広くなると各層の露出表面積が増え、冷却が速くなります。4ミリから6ミリへ移ると、この追加冷却によって内部の結晶粒やデンドライトが微細化し、粗大で板状の特徴が壊れて破壊に強い細かな構造に変わりました。幅をさらに8ミリにすると粒はさらに微細化したものの、球状化した組織や気孔の発生が促され、これらはき裂伝播を抑える効果が低下します。層高にわたっては、意図的な温度管理により底部から上部まで比較的一様な構造が保たれ、多くの溶接積層部品に見られるような高さによる大きな特性変化は抑えられました。
強さ、伸び、方向性のバランス
評価の結果、3つの織り幅はいずれも実用的な硬さと延性を示しましたが重要な差が現れました。平均硬さは大きく変わらない一方で、底部から上部への硬さのばらつきは織り幅に依存し、粒径と硬いシリコン粒子の比率変化を反映していました。引張試験では中間の6ミリ織り幅が特に魅力的な組合せを示しました:走行方向と積層方向の両方で良好な強度と比較的高い伸びを備え、方向による差も最小でした。対照的に最も広い8ミリ織り幅では延性が低下し、特に垂直方向で顕著で、破壊挙動は延性破壊と脆性破壊の混合へと傾きました。破面観察はこの傾向を裏付けます:4ミリと6ミリでは微小な窪み(ダイムプル)が主体で延性破断の特徴を示す一方、8ミリでは気孔や準割れ特徴が増え、より許容性の低い材料特性を示しました。
実用部品にとっての意味
ワイヤーアークで大型アルミ部品を3Dプリントしようとするエンジニアにとって、本研究はロボットの織り幅が単なるプログラム上の細部ではなく、冷却、内部構造、最終的な性能を決める強力な調整項目であることを示しています。本研究では約6ミリの中間的な織り幅が最良のトレードオフを示し、製造効率を高めつつ強度、延性、方向性の一貫性を保ちました。簡潔に言えば、織り幅が小さすぎると組織が粗くなりすぎ、大きすぎると有害な特徴が導入される可能性がありますが、中間的な織り幅は合金を細かく粘り強いネットワークに“凍結”させるのに役立ちます。層間での慎重な温度管理と組み合わせることで、迅速に製造でき、構造的にも信頼できる大型アルミ部品を作るための実用的な指針を提供します。
引用: Liu, S., Sun, Y., Yuan, X. et al. Optimizing robot weaving width improves the microstructure and mechanical performance of 4043 aluminum alloy in CMT-WAAM. Sci Rep 16, 14005 (2026). https://doi.org/10.1038/s41598-026-43670-x
キーワード: ワイヤーアーク積層造形, アルミニウム合金, ロボット織り, コールドメタルトランスファー, 微細構造