Clear Sky Science · zh
使用全阶自适应观测器和精确离散时间模型的重构预测转矩与磁通控制,用于无传感器感应机驱动
无需脆弱传感器的更智能电机
电动机无处不在——从厂内的输送带到风力涡轮,无声地把电能转化为机械运动。保持其高效运行通常需要精密传感器来跟踪内部转速和磁场,但这些传感器在恶劣的工业环境中容易失效。本文探讨了一种在无需这些传感器的情况下,用仅有的电气测量和嵌入控制软件中的巧妙数学方法来精确驱动强大工业电机的途径。
为什么要去掉硬件传感器?
工业感应电机因其坚固、低成本且能在宽广转速范围内工作而广受欢迎。传统上,工程师依赖安装在电机轴或磁路上的硬件传感器来测量转速和磁通。然而,这些器件易受灰尘、振动、热和电磁干扰的影响,并且增加成本与维护负担。因此,越来越多的趋势是构建“无传感器”驱动,即控制系统从端点易测的电流中估计电机的内部状态。要可靠实现这一点存在挑战:如果电机的内部模型哪怕略有不准,性能就会下降,导致额外损耗、转矩波动或不稳定行为。
把方程变成数字孪生
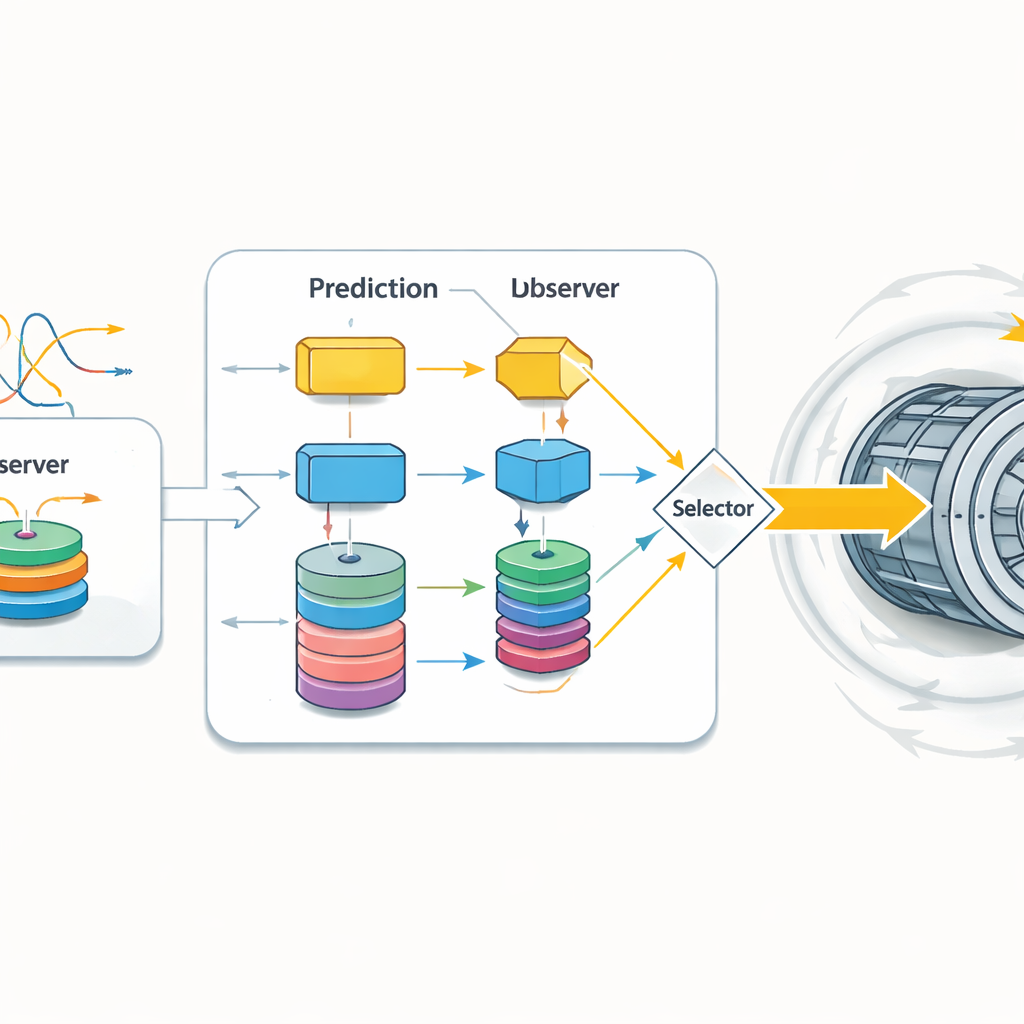
作者关注一类称为模型预测控制的技术,该技术使用电机的数字“孪生”来预测在施加不同电压指令时会发生什么。控制器从这些预测中选择能在下一时刻实现期望转矩和磁通的方案。为了跟踪未测量的内部量,他们使用全阶自适应观测器,这是一种基于预测与测量之间不匹配不断校正电流、磁通和转速估计的数学结构。核心创新在于将电机模型改写为仅以定子电流和定子磁通作为状态变量,去除方程中的转子磁通。这减少了必须跟踪的量,简化了观测器,并加强了模型与对转矩控制真正重要量之间的联系。
为数字控制打造更精确的离散时间模型
由于实际控制器以离散时间步工作,连续的电机方程必须被近似为逐步更新规则。大多数驱动依赖简单的欧拉法,这种方法计算量小但在采样率不极高时可能变得不准确。作者研究了基于泰勒级数和龙格—库塔方法的更精确替代方法,这些方法使用更高阶的信息来表示电机状态在采样区间内的演化。他们为观测器和预测控制器一致地推导了二阶及更高阶的离散时间模型。尽管这些方法每步需要更多计算,但在实用采样率下它们有望显著提高数值精度,进而改善对隐藏变量的估计和控制决策的质量。
在实时环境中检验算法
为评估这些想法在实践中的表现,研究人员搭建了硬件在环平台。实时仿真器模拟了一个4千瓦的感应电机及其电力电子装置,而无传感器控制算法在独立的处理器核上运行,就像在实际工业驱动中那样。该平台允许对不同模型变体进行快速且可重复的试验。他们将传统的观测器和控制器与重构后的版本进行比较,并将欧拉、泰勒与龙格—库塔离散化方法互相对照。评估不仅包括转矩、转速和磁通跟踪目标的精度,还包括速度变化后的响应时间、转矩波动幅度以及每种方法消耗的处理器时间。
这些结果对实际电机意味着什么
测试表明,仅仅提升观测器的精度——而不改变基本的预测控制策略——就能显著改善无传感器性能。重构的框架避免了显式的转子磁通估计,在稳态行为上至少与传统方案相当并且在达到期望转速方面更快,尽管所依赖的状态变量更少。在离散时间方法中,基于泰勒的方法表现突出:它带来了最小的转速和磁通误差以及最快的动态响应,计算成本适度增加且转矩波动仅略有上升。尽管理论上更精细的高阶龙格—库塔方法在该控制设置下因无法充分利用未来输入信息而实际收益有限。总体而言,研究表明精心设计的高精度数字模型可以使坚固的无传感器感应电机驱动既更简洁又更精确——这对要求严苛的工业应用而言具有很强吸引力。
引用: Herrera-Hernández, R., Reusser, C., Carvajal, R. et al. Reformulated predictive torque and flux control with a full-order adaptive observer and accurate discrete-time models for sensorless induction machine drives. Sci Rep 16, 12757 (2026). https://doi.org/10.1038/s41598-026-41944-y
关键词: 无传感器电机控制, 感应机驱动, 模型预测控制, 自适应观测器, 离散时间建模