Clear Sky Science · he
בקרה חוזית מחודשת למומנט ולשטף עם משקיף הסתגלותי מלא ומודלים מדויקים בדיסקרט-טיים לדרייבים של מכונות אינדוקציה ללא חיישנים
מנועים חכמים בלי חיישנים עדינים
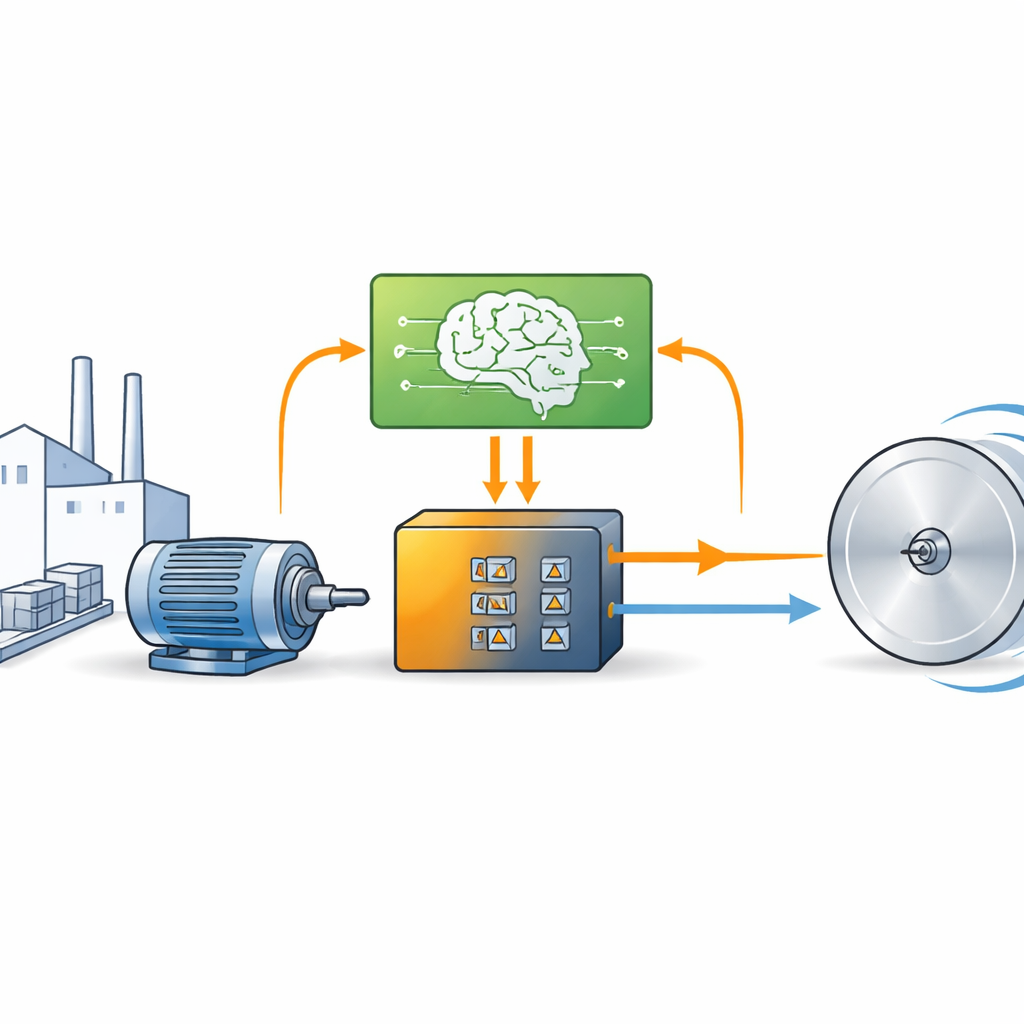
מנועים חשמליים נמצאים בכל מקום — מקווי ייצור ועד טורבינות רוח — והופכים חשמל לתנועה באופן כמעט בלתי נראה. שמירה על יעילותם דורשת בדרך כלל חיישנים רגישים למעקב אחרי המהירות והשדות המגנטיים הפנימיים, אך חיישנים אלה עלולים להיכשל בסביבות תעשייתיות קשות. מאמר זה בוחן דרך להפעיל מנועים תעשייתיים חזקים בדיוק גבוה בלי חיישנים כאלה, בעזרת מדידות חשמליות בלבד ומתמטיקה חכמה שעומדת בבסיס התוכנה שמבצעת את הבקרה.
למה לוותר על חיישני החומרה?
מנועי אינדוקציה תעשייתיים פופולריים בזכות העמידות, המחיר הזול והיכולת לפעול על טווח מהירויות רחב. בדרך המקובלת מהנדסים מסתמכים על חיישני חומרה המחוברים לציר המנוע או למעגל המגנטי כדי למדוד מהירות ושטף מגנטי. התקנים אלה פגיעים לאבק, רטט, חום והפרעות אלקטרומגנטיות, והם מגדילים עלויות ותחזוקה. לכן עולה הטרנד של בניית דרייבים 'ללא חיישנים', שבהם מערכת הבקרה מעריכה את המצב הפנימי של המנוע מן הזרמים החשמליים הניתנים למדידה בטרמינלים. השגת אמינות במצב זה היא אתגר: אם המודל הפנימי של המנוע אינו מדויק אפילו במעט, הביצועים עלולים להיפגע, לגרום לאובדנים נוספים, תנודות מומנט או התנהגות לא יציבה.
הפיכת משוואות לתאום דיגיטלי
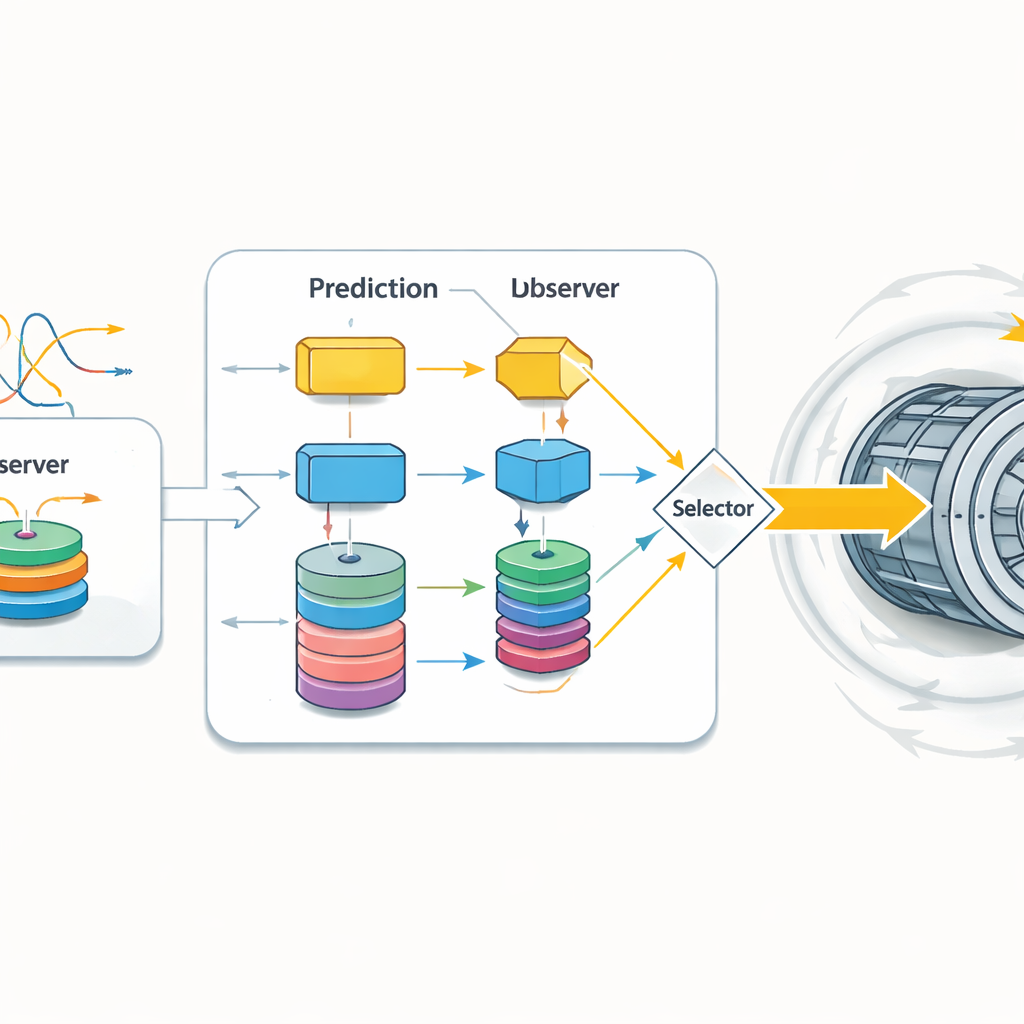
המחברים מתמקדים בקבוצת טכניקות הנקראות בקרת חיזוי מבוססת מודל, שעושה שימוש ב"תאום" דיגיטלי של המנוע כדי לחזות מה יקרה אם יחולו פקודות מתח שונות. מתוך תחזיות אלה הבקר בוחר את האופציה שצפויה לספק את המומנט והשטף המגנטי הרצויים ברגע הבא. כדי לעקוב אחרי הכמויות הפנימיות שלא נמדדות הם משתמשים במשקיף הסתגלותי מלא, מבנה מתמטי שמעדכן ברציפות את האומדנים של הזרם, השטף והמהירות על בסיס הפער בין חיזוי למדידה. החדשנות המרכזית היא לשכתב את מודל המנוע כך שישתמש רק בזרם הסטטור ובשטף הסטטור כמשתני מצב, ולהסיר את שטף הרוטור מהמשוואות. זה מפחית את מספר הכמויות שיש לעקוב אחריהן, מפשט את המשקיף ומחזק את הקשר בין מה שמודגם לבין מה שבאמת חשוב לבקרת המומנט.
מודלים דיסקרטיים חדים יותר לבקרה דיגיטלית
מכיוון שמערכות בקרה אמיתיות פועלות בצעדי זמן דיסקרטיים, יש לקרב את משוואות המנוע הרציפות לכללי עדכון צעד-אחר-צעד. רוב הדרייבים מסתמכים על שיטת אאולר הפשוטה, שהיא קלה לחישוב אך עלולה להיות לא מדויקת אם קצב הדגימה אינו גבוה במיוחד. המחברים בודקים חלופות מדויקות יותר המבוססות על טור טיילור ושיטות רן-קוטה, המייצגות כיצד מצב המנוע מתפתח על פני מרווח דגימה תוך שימוש במידע מדרגה גבוהה יותר. הם גוזרים גרסאות מדרגה שנייה ומעלה של מודלים דיסקרטיים אלה בעקביות גם למשקיף וגם לבקר החיזוי. אמנם שיטות אלה דורשות חישובים נוספים לכל צעד, אך הן מבטיחות דיוק מספרי טוב יותר בקצבי דגימה מעשיים, מה שיכול לשפר הן את האומדן של המשתנים הנסתרים והן את איכות החלטות הבקרה.
בדיקת האלגוריתמים בזמן-אמיתי
כדי לראות כיצד הרעיונות הללו מתפקדים במציאות, החוקרים בנו מערכת חומרה-במעגל (hardware-in-the-loop). סימולטור בזמן-אמיתי חיקה מנוע אינדוקציה בהספק 4 קילוואט ואת האלקטרוניקה ההספקתית שלו, בעוד אלגוריתמי הבקרה ללא חיישנים רצו על ליבת מעבד נפרדת, כפי שיהיו בדורייב תעשייתי אמיתי. זה איפשר ניסויים מהירים ומחזוריים עם וריאציות מודל שונות. הם השוו את המשקיף והבקר המסורתיים לגרסאותיהם המשוכותבות, וכן התחרו שיטות דיסקרטיזציה של אאולר, טיילור ורן-קוטה זו בזו. הם העריכו לא רק עד כמה המומנט, המהירות והשטף עקבו אחרי היעדים, אלא גם כמה במהירות המערכת התייצבה לאחר שינויים במהירות, מה גודל תנודת המומנט וכמה זמן עיבוד כל שיטה צרכה.
מה המשמעות של התוצאות למכונות אמיתיות
המבחנים הראו ששיפור בדיוק המשקיף — מבלי לשנות את אסטרטגיית בקרת החיזוי הבסיסית — כבר מניב שיפור ניכר בביצועים ללא חיישנים. המסגרת המשוכתבת, שממנעת אומדן מפורש של שטף הרוטור, התאימה או עלתה על הסכימה המקובלת בהתנהגות במצב יציב והגיעה למהירות הרצויה מהר יותר, אף שהסתמכה על פחות משתני מצב. בין שיטות הזמן-דיסקרטיות, הגישה המבוססת טיילור בלטה: היא סיפקה את השגיאות הקטנות ביותר במהירות ובשטף ואת התגובה הדינמית המהירה ביותר, בעלייה מתונה בעלות המחשוב ורק עלייה קלה בתנודת המומנט. שיטות רן-קוטה מדרגה גבוהה יותר, אף שנראות מתמטית משופרות יותר, הציעו מעט תועלת מעשית מכיוון שאינן מנצלות במלואן מידע עתידי על הקלט בהקשר הבקרה הזה. בסך הכול, המחקר מרמז שמודלים דיגיטליים מדויקים יותר, המעוצבים בקפידה, יכולים להפוך דרייבים חסינים של מנועי אינדוקציה ללא חיישנים לפשוטים ומדויקים יותר — שילוב אטרקטיבי ליישומים תעשייתיים תובעניים.
ציטוט: Herrera-Hernández, R., Reusser, C., Carvajal, R. et al. Reformulated predictive torque and flux control with a full-order adaptive observer and accurate discrete-time models for sensorless induction machine drives. Sci Rep 16, 12757 (2026). https://doi.org/10.1038/s41598-026-41944-y
מילות מפתח: בקרת מנועים ללא חיישנים, דרייבים של מכונות אינדוקציה, בקרת חיזוי מבוססת מודל, משקיפים הסתגלותיים, דגימת זמן דיסקרטית