Clear Sky Science · sv
Reformulerad prediktiv vridmoment- och flödesreglering med en fullordnings adaptiv observatör och noggranna diskreta-tidsmodeller för sensorlösa induktionsmaskindrifter
Smartare motorer utan ömtåliga sensorer
Elektriska motorer finns överallt — från fabriksband till vindkraftverk — och omvandlar elektricitet till rörelse. Att hålla dem effektiva kräver ofta känsliga sensorer för att mäta intern hastighet och magnetfält, men dessa sensorer kan sluta fungera i krävande industrimiljöer. Denna artikel utforskar ett sätt att driva kraftfulla industriella motorer exakt utan sådana sensorer, med endast elektriska mätningar och smart matematik inbyggd i styrprogramvaran.
Varför ta bort hårdvarusensorerna?
Industriella induktionsmotorer är populära eftersom de är robusta, billiga och kan köras över ett brett varvtalsområde. Traditionellt förlitar sig ingenjörer på hårdvarusensorer fästa på motoraxeln eller i det magnetiska kretsloppet för att mäta hastighet och magnetiskt flöde. Dessa enheter är dock känsliga för damm, vibrationer, värme och elektromagnetiska störningar, och de ökar kostnaderna och underhållet. En växande trend är därför att bygga ”sensorlösa” drivsystem där styrsystemet uppskattar motorns interna tillstånd från lätt mätbara elektriska strömmar vid terminalerna. Att uppnå detta pålitligt är en utmaning: om den interna motormodellen är ens lite felaktig kan prestandan försämras, vilket leder till ökade förluster, vridmomentsvängningar eller instabilt beteende.
Att omvandla ekvationer till en digital tvilling
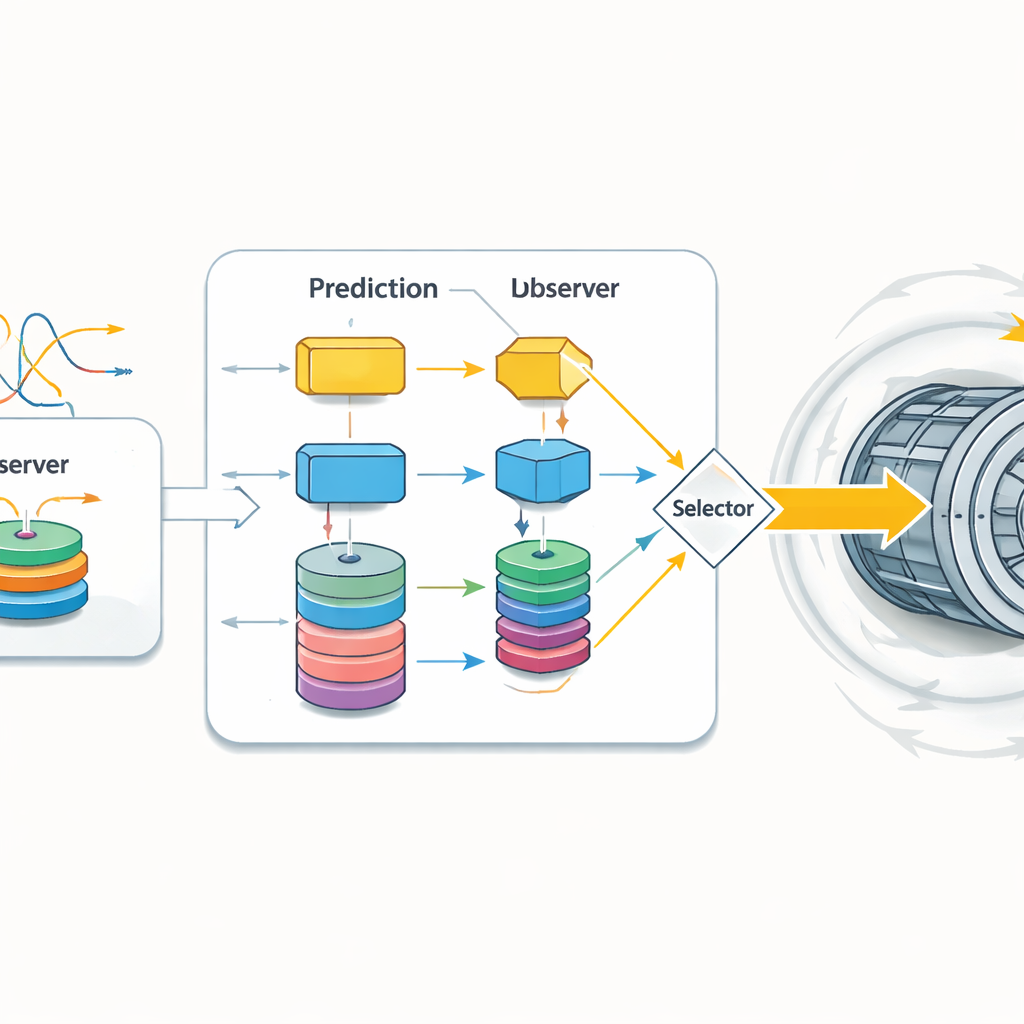
Författarna fokuserar på en klass av tekniker kallade modellprediktiv styrning, som använder en digital ”tvilling” av motorn för att förutsäga vad som händer om olika spänningskommando appliceras. Utifrån dessa prognoser väljer styrenheten den åtgärd som bör ge önskat vridmoment och magnetiskt flöde i nästa ögonblick. För att hålla reda på de omätbara interna storheterna använder de en fullordnings adaptiv observatör, en matematisk struktur som kontinuerligt förfinar sina uppskattningar av ström, magnetiskt flöde och hastighet baserat på avvikelsen mellan prediktion och mätning. Den centrala innovationen är att skriva om motormodellen så att endast statorström och statorflöde används som tillståndsvariabler, och rotorflödet tas bort ur ekvationerna. Det minskar antalet storheter som måste följas, förenklar observatören och stärkt kopplingen mellan vad som modelleras och vad som faktiskt är viktigt för vridmomentsstyrning.
Skarpare diskreta-tidsmodeller för digital styrning
Eftersom verkliga styrenheter arbetar i diskreta tidssteg måste kontinuerliga motorekvationer approximeras som steg-för-steg-uppdateringsregler. De flesta drivsystem förlitar sig på den enkla Eulermetoden, som är lätt att beräkna men kan bli otillräckligt noggrann om samplingsfrekvensen inte är extremt hög. Författarna undersöker mer precisa alternativ baserade på Taylors serier och Runge–Kutta-metoder, som beskriver hur motorns tillstånd utvecklas över ett samplingsintervall med hjälp av högre ordningens information. De härleder andra- och högreordningsversioner av dessa diskreta-tidsmodeller konsekvent både för observatören och för den prediktiva regulatorn. Även om dessa metoder kräver fler beräkningar per steg lovar de mycket bättre numerisk noggrannhet vid praktiska samplingsfrekvenser, vilket potentiellt förbättrar både uppskattningen av dolda variabler och kvaliteten på styrbesluten.
Sätta algoritmerna på realtidstest
För att se hur dessa idéer fungerar i praktiken byggde forskarna en hardware-in-the-loop-uppställning. En realtidssimulator emulerade en 4 kilowatt induktionsmotor och dess kraftelektronik, medan de sensorlösa styralgoritmerna kördes på en separat processorkärna, precis som i ett faktiskt industriellt drivsystem. Detta möjliggjorde snabba, upprepbara experiment med olika modellvarianter. De jämförde den traditionella observatören och regulatorn med deras omformulerade versioner, och ställde även Euler-, Taylor- och Runge–Kutta-diskretiseringarna mot varandra. De utvärderade inte bara hur väl vridmoment, hastighet och flöde följde sina mål, utan också hur snabbt systemet stabiliserade sig efter varvtalsändringar, hur stor vridmomentsvippningen var och hur mycket processortid varje metod förbrukade.
Vad resultaten betyder för riktiga maskiner
Tester visade att enbart förbättrad observatörsnoggrannhet — utan att ändra den grundläggande prediktiva styrstrategin — redan ger märkbart bättre sensorlös prestanda. Det omformulerade ramverket, som undviker explicit uppskattning av rotorflödet, matchade eller överträffade det konventionella schemat i steady-state-beteende och nådde önskat varvtal snabbare, trots att det förlitade sig på färre tillståndsvariabler. Bland diskreta-tidsmetoderna utmärkte sig Taylor-baserade angreppssättet: det gav de minsta felen i hastighet och flöde och snabbast dynamiskt svar, med en måttlig ökning i beräkningskostnad och endast en liten ökning i vridmomentsvippning. Högreordnade Runge–Kutta-metoder, även om de teoretiskt är mer förfinade, gav liten praktisk nytta eftersom de inte kan utnyttja framtida insignal-information fullt ut i denna styrkontext. Sammanfattningsvis tyder studien på att noggrant utformade, högreprecisiona digitala modeller kan göra robusta sensorlösa induktionsmaskindrifter både enklare och mer precisa — en attraktiv kombination för krävande industriella tillämpningar.
Citering: Herrera-Hernández, R., Reusser, C., Carvajal, R. et al. Reformulated predictive torque and flux control with a full-order adaptive observer and accurate discrete-time models for sensorless induction machine drives. Sci Rep 16, 12757 (2026). https://doi.org/10.1038/s41598-026-41944-y
Nyckelord: sensorlös motorstyrning, induktionsmaskindrifter, modellprediktiv styrning, adaptiva observatörer, diskret tidsmodellering