Clear Sky Science · pt
Controle preditivo reformulado de torque e fluxo com observador adaptativo de ordem total e modelos discretos de tempo precisos para acionamentos de máquinas de indução sem sensores
Motores mais inteligentes sem sensores frágeis
Motores elétricos estão por toda parte — desde esteiras industriais até turbinas eólicas — convertendo silenciosamente eletricidade em movimento. Mantê‑los operando de forma eficiente geralmente requer sensores delicados para monitorar sua velocidade interna e campos magnéticos, mas esses sensores podem falhar em ambientes industriais agressivos. Este artigo explora uma forma de acionar motores industriais potentes com precisão sem esses sensores, usando apenas medições elétricas e matemática inteligente incorporada ao software de controle.
Por que abandonar os sensores de hardware?
Os motores de indução industriais são populares porque são robustos, baratos e podem operar em uma ampla faixa de velocidades. Tradicionalmente, os engenheiros dependem de sensores de hardware acoplados ao eixo do motor ou ao circuito magnético para medir velocidade e fluxo magnético. Esses dispositivos, entretanto, são vulneráveis a pó, vibração, calor e interferência eletromagnética, além de aumentar custo e manutenção. Assim, há uma tendência crescente de construir acionamentos “sem sensor”, onde o sistema de controle estima o estado interno do motor a partir das correntes elétricas medidas facilmente em seus terminais. Conseguir isso de forma confiável é um desafio: se o modelo interno do motor for minimamente impreciso, o desempenho pode piorar, causando perdas adicionais, ondulação de torque ou comportamento instável.
Transformando equações em um gêmeo digital
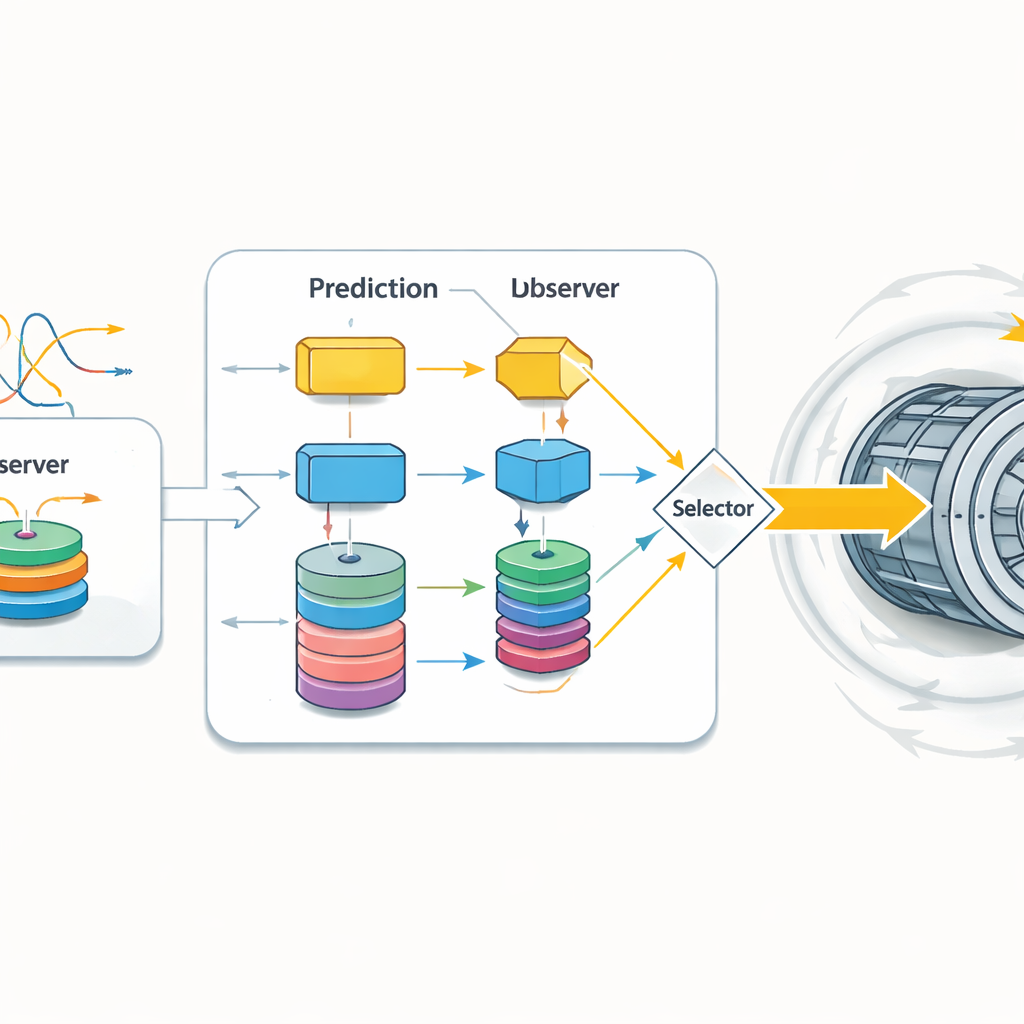
Os autores concentram‑se em uma classe de técnicas chamadas controle preditivo baseado em modelo, que usa um “gêmeo” digital do motor para prever o que acontecerá se diferentes comandos de tensão forem aplicados. A partir dessas previsões, o controlador escolhe a opção que deve fornecer o torque e o fluxo magnético desejados no instante seguinte. Para acompanhar as grandezas internas não medidas, eles usam um observador adaptativo de ordem total, uma estrutura matemática que refina continuamente suas estimativas de corrente, fluxo magnético e velocidade com base no erro entre previsão e medida. A inovação central é reescrever o modelo do motor usando apenas corrente do estator e fluxo magnético do estator como variáveis de estado, eliminando o fluxo do rotor das equações. Isso reduz o número de grandezas que precisam ser estimadas, simplifica o observador e estreita a ligação entre o que é modelado e o que realmente importa para o controle de torque.
Modelos discretos mais precisos para controle digital
Como controladores reais operam em passos de tempo discretos, as equações contínuas do motor devem ser aproximadas por regras de atualização passo a passo. A maioria dos acionamentos usa o método simples de Euler, que é fácil de computar mas pode se tornar impreciso se a taxa de amostragem não for extremamente alta. Os autores investigam alternativas mais precisas baseadas em séries de Taylor e em métodos de Runge–Kutta, que representam como o estado do motor evolui ao longo de um intervalo de amostragem usando informação de ordem superior. Eles derivam versões de segunda e ordem superior desses modelos em tempo discreto de forma consistente tanto para o observador quanto para o controlador preditivo. Embora esses métodos exijam mais cálculos por passo, eles prometem muito melhor precisão numérica em taxas de amostragem práticas, potencialmente melhorando tanto a estimação das variáveis ocultas quanto a qualidade das decisões de controle.
Testando os algoritmos em tempo real
Para avaliar como essas ideias se comportam na prática, os pesquisadores construíram um sistema hardware‑in‑the‑loop. Um simulador em tempo real emulou um motor de indução de 4 quilowatts e sua eletrônica de potência, enquanto os algoritmos de controle sem sensor rodaram em um núcleo de processador separado, exatamente como fariam em um acionamento industrial real. Isso permitiu experimentos rápidos e repetíveis com diferentes variantes de modelo. Eles compararam o observador e o controlador tradicionais com suas versões reformuladas, e também colocaram os métodos de discretização Euler, Taylor e Runge–Kutta frente a frente. Avaliaram não apenas quão de perto torque, velocidade e fluxo seguiram suas referências, mas também quão rápido o sistema se estabilizou após mudanças de velocidade, quão grande foi a ondulação de torque e quanto tempo de processador cada método consumiu.
O que os resultados significam para máquinas reais
Os testes mostraram que melhorar simplesmente a precisão do observador — sem alterar a estratégia básica de controle preditivo — já proporciona desempenho sem sensor claramente melhor. A estrutura reformulada, que evita a estimação explícita do fluxo do rotor, igualou ou superou o esquema convencional no comportamento em regime permanente e atingiu a velocidade desejada mais rapidamente, apesar de depender de menos variáveis de estado. Entre os métodos em tempo discreto, a abordagem baseada em Taylor se destacou: entregou os menores erros de velocidade e fluxo e a resposta dinâmica mais rápida, com um aumento moderado no custo computacional e apenas uma leve elevação na ondulação de torque. Métodos de Runge–Kutta de ordem mais alta, embora teoricamente mais refinados, ofereceram pouco benefício prático porque não conseguem explorar totalmente informação futura de entradas nesse contexto de controle. De modo geral, o estudo sugere que modelos digitais projetados com maior precisão podem tornar acionamentos de motores de indução sem sensor mais robustos e mais precisos — uma combinação atraente para aplicações industriais exigentes.
Citação: Herrera-Hernández, R., Reusser, C., Carvajal, R. et al. Reformulated predictive torque and flux control with a full-order adaptive observer and accurate discrete-time models for sensorless induction machine drives. Sci Rep 16, 12757 (2026). https://doi.org/10.1038/s41598-026-41944-y
Palavras-chave: controle de motor sem sensor, acionamentos de máquinas de indução, controle preditivo baseado em modelo, observadores adaptativos, modelagem em tempo discreto