Clear Sky Science · ru
Реформулированное предиктивное управление крутящим моментом и потоком с адаптивным наблюдателем полного порядка и точными дискретными моделями для бесдатчиковых приводов асинхронных машин
Более «умные» моторы без хрупких датчиков
Электродвигатели повсюду — от конвейеров на заводах до ветряных турбин — тихо превращают электричество в движение. Для поддержания их высокой эффективности обычно требуются чувствительные датчики, отслеживающие скорость и магнитные поля, но такие датчики подвержены отказам в суровых промышленных условиях. В этой работе рассматривается способ точного управления мощными промышленными двигателями без применения этих датчиков, используя только электрические измерения и продуманные математические алгоритмы, реализованные в программном обеспечении управления.
Зачем отказываться от аппаратных датчиков?
Промышленные асинхронные двигатели популярны благодаря прочности, невысокой стоимости и способности работать в широком диапазоне скоростей. Традиционно инженеры используют аппаратные датчики, установленные на валу двигателя или в магнитной цепи, чтобы измерять скорость и магнитный поток. Однако такие устройства уязвимы к пыли, вибрации, высокой температуре и электромагнитным помехам, а также увеличивают стоимость и объем обслуживания. Поэтому набирает обороты тренд на «бесдатчиковые» приводы, в которых система управления оценивает внутреннее состояние двигателя по легко измеряемым токам на клеммах. Добиться при этом надежности непросто: при даже небольшой неточности внутренней модели двигателя характеристики могут ухудшиться, появляются дополнительные потери, пульсации момента или нестабильное поведение.
Преобразование уравнений в цифрового двойника
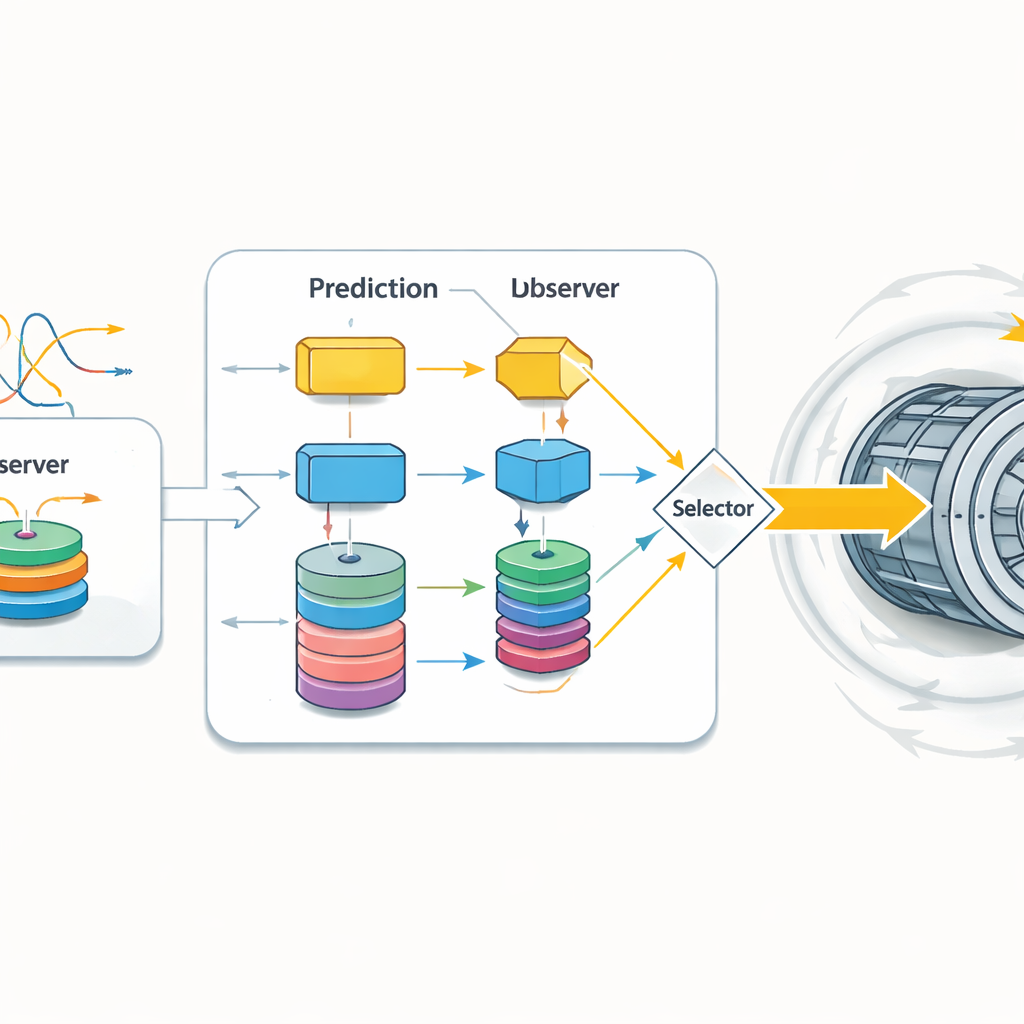
Авторы сосредотачиваются на классе методов, называемых предиктивным управлением по модели, которые используют цифровой «двойник» двигателя для прогнозирования последствий применения разных заданных напряжений. Исходя из этих прогнозов, контроллер выбирает вариант, который должен обеспечить требуемый крутящий момент и магнитный поток в следующий инстант. Для отслеживания немеряемых внутренних величин они используют адаптивный наблюдатель полного порядка — математическую структуру, которая непрерывно уточняет оценки токов, магнитного потока и скорости на основе несоответствия между предсказанием и измерением. Центральное новшество состоит в переписывании модели двигателя с использованием только тока статора и магнитного потока статора в качестве переменных состояния, исключив из уравнений поток ротора. Это снижает число отслеживаемых величин, упрощает наблюдатель и укрепляет связь между моделируемым и тем, что действительно важно для управления крутящим моментом.
Более точные дискретные модели для цифрового управления
Поскольку реальные контроллеры работают в дискретные интервалы, непрерывные уравнения двигателя нужно аппроксимировать шаговыми правилами обновления. Большинство приводов опираются на простой метод Эйлера, который легко вычислять, но он может стать неточным при недостаточно высокой частоте дискретизации. Авторы исследуют более точные альтернативы на основе рядов Тейлора и методов Рунге — Кутты, которые описывают эволюцию состояния двигателя за интервал дискретизации с учётом членами более высоких порядков. Они последовательно выводят вторые и более высокие порядковые версии этих дискретных моделей как для наблюдателя, так и для предиктивного контроллера. Хотя эти методы требуют больших вычислительных затрат на шаг, они обещают заметно лучшую числовую точность при практических частотах дискретизации, что потенциально улучшает и оценку скрытых переменных, и качество управляющих решений.
Проверка алгоритмов в реальном времени
Чтобы оценить практическую работоспособность идей, исследователи собрали стенд аппаратной в петле (hardware-in-the-loop). Реальный симулятор имитировал 4-киловаттный асинхронный двигатель и его силовую электронику, тогда как бесдатчиковые алгоритмы управления выполнялись на отдельном ядре процессора, как это было бы в реальном промышленном приводе. Это позволило проводить быстрые и повторяемые эксперименты с разными вариантами моделей. Они сравнивали традиционный наблюдатель и контроллер с их реформулированными версиями, а также противостояли дискретизации Эйлера, Тейлора и Рунге — Кутты. Оценивали не только насколько точно крутящий момент, скорость и поток следуют заданным значениям, но и как быстро система устанавливается после изменения скорости, величину пульсаций момента и сколько процессорного времени требует каждый метод.
Что означают результаты для реальных машин
Испытания показали, что даже простое повышение точности наблюдателя — без изменения базовой стратегии предиктивного управления — уже заметно улучшает бесдатчиковые характеристики. Реформулированная схема, которая избегает явной оценки потока ротора, сравнялась или превзошла традиционную в установившемся режиме и достигала требуемой скорости быстрее, несмотря на меньшее число переменных состояния. Среди дискретных методов особенно выделился подход на основе рядов Тейлора: он обеспечивал наименьшие ошибки по скорости и потоку и самую быструю динамическую реакцию при умеренном увеличении вычислительной нагрузки и лишь незначительном росте пульсаций момента. Методы Рунге — Кутты более высокого порядка, хотя теоретически более точные, принесли мало практической пользы, поскольку в этой конфигурации управления они не могут в полной мере использовать информацию о будущих входах. В целом исследование показывает, что тщательно спроектированные цифровые модели повышенной точности способны сделать прочные бесдатчиковые приводы асинхронных машин одновременно проще и точнее — привлекательное сочетание для требовательных промышленных применений.
Цитирование: Herrera-Hernández, R., Reusser, C., Carvajal, R. et al. Reformulated predictive torque and flux control with a full-order adaptive observer and accurate discrete-time models for sensorless induction machine drives. Sci Rep 16, 12757 (2026). https://doi.org/10.1038/s41598-026-41944-y
Ключевые слова: управление мотором без датчиков, приводы асинхронных машин, предиктивное моделирование управления, адаптивные наблюдатели, дискретное моделирование