Clear Sky Science · fr
Commande prédictive reformulée de couple et de flux avec un observateur adaptatif d’ordre complet et modèles discrets précis pour entraînements de machines à induction sans capteur
Des moteurs plus intelligents sans capteurs fragiles
Les moteurs électriques sont partout — des tapis roulants d’usine aux éoliennes — convertissant discrètement l’électricité en mouvement. Les maintenir efficaces exige généralement des capteurs délicats pour suivre leur vitesse interne et leurs champs magnétiques, mais ces capteurs peuvent tomber en panne dans des environnements industriels agressifs. Cet article explore une façon de faire fonctionner des moteurs industriels puissants avec précision sans ces capteurs, en n’utilisant que des mesures électriques et des mathématiques ingénieuses intégrées au logiciel de commande.
Pourquoi se débarrasser des capteurs matériels ?
Les moteurs asynchrones industriels sont populaires parce qu’ils sont robustes, peu coûteux et peuvent fonctionner sur une large plage de vitesses. Traditionnellement, les ingénieurs s’appuient sur des capteurs matériels fixés à l’arbre du moteur ou au circuit magnétique pour mesurer la vitesse et le flux magnétique. Ces dispositifs, toutefois, sont vulnérables à la poussière, aux vibrations, à la chaleur et aux interférences électromagnétiques, et ils augmentent le coût et la maintenance. Une tendance croissante consiste donc à concevoir des variateurs « sans capteur », où le système de commande estime l’état interne du moteur à partir des courants électriques facilement mesurables à ses bornes. Obtenir cela de façon fiable est un défi : si le modèle interne du moteur est même légèrement inexact, les performances peuvent se détériorer, entraînant des pertes supplémentaires, des ondulations de couple ou un comportement instable.
Transformer des équations en jumeau numérique
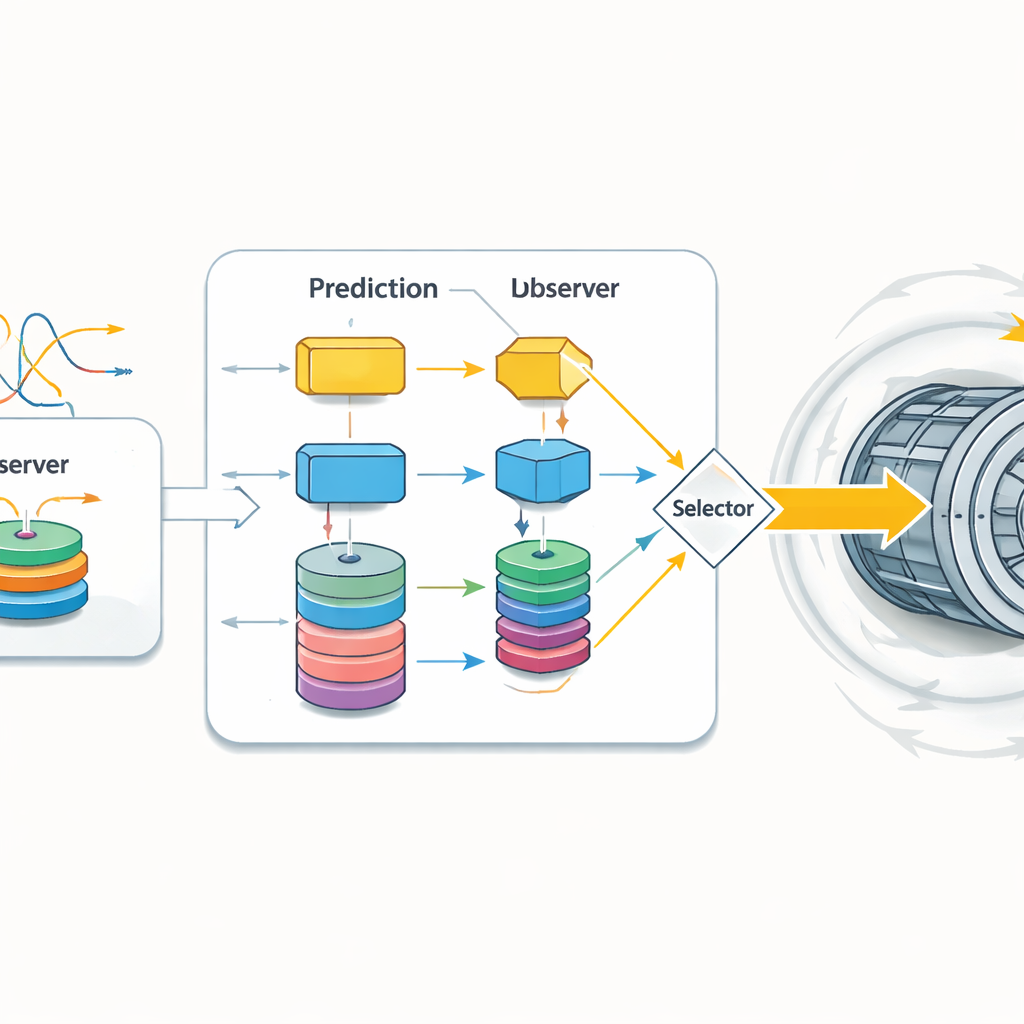
Les auteurs se concentrent sur une classe de techniques appelée commande prédictive par modèle, qui utilise un « jumeau » numérique du moteur pour prévoir ce qui se produira si différentes commandes de tension sont appliquées. À partir de ces prévisions, le contrôleur choisit l’option qui devrait fournir le couple et le flux magnétique souhaités à l’instant suivant. Pour suivre les grandeurs internes non mesurées, ils utilisent un observateur adaptatif d’ordre complet, une structure mathématique qui affine en continu ses estimations de courant, de flux magnétique et de vitesse en se basant sur l’écart entre la prédiction et la mesure. L’innovation centrale consiste à réécrire le modèle du moteur en n’utilisant que le courant statorique et le flux statorique comme variables d’état, en éliminant le flux rotorique des équations. Cela réduit le nombre de quantités à suivre, simplifie l’observateur et resserre le lien entre ce qui est modélisé et ce qui importe réellement pour la commande du couple.
Modèles discrets plus précis pour la commande numérique
Parce que les contrôleurs réels fonctionnent par pas de temps discrets, les équations continues du moteur doivent être approchées par des règles de mise à jour pas à pas. La plupart des variateurs utilisent la méthode d’Euler, simple à calculer mais susceptible de devenir inexacte si la fréquence d’échantillonnage n’est pas extrêmement élevée. Les auteurs étudient des alternatives plus précises basées sur les séries de Taylor et les méthodes de Runge–Kutta, qui représentent l’évolution de l’état du moteur sur un intervalle d’échantillonnage en utilisant des informations d’ordre supérieur. Ils dérivent de manière cohérente des versions d’ordre deux et supérieur de ces modèles en temps discret pour l’observateur et le contrôleur prédictif. Bien que ces méthodes exigent plus de calculs par pas, elles promettent une bien meilleure précision numérique à des fréquences d’échantillonnage pratiques, améliorant potentiellement à la fois l’estimation des variables cachées et la qualité des décisions de commande.
Tester les algorithmes en temps réel
Pour évaluer ces idées en pratique, les chercheurs ont construit un banc « hardware-in-the-loop ». Un simulateur temps réel a émulé un moteur asynchrone de 4 kilowatts et son électronique de puissance, tandis que les algorithmes de commande sans capteur s’exécutaient sur un cœur de processeur séparé, comme ils le feraient dans un variateur industriel réel. Cela a permis des expériences rapides et reproductibles avec différentes variantes de modèle. Ils ont comparé l’observateur et le contrôleur traditionnels à leurs versions reformulées, et ont aussi opposé les discrétisations d’Euler, de Taylor et de Runge–Kutta. Ils ont évalué non seulement la précision avec laquelle le couple, la vitesse et le flux suivaient leurs consignes, mais aussi la rapidité de stabilisation après des variations de vitesse, l’amplitude des ondulations de couple et le temps processeur consommé par chaque méthode.
Ce que signifient les résultats pour les machines réelles
Les tests ont montré que l’amélioration de la précision de l’observateur — sans changer la stratégie de commande prédictive de base — apporte déjà des performances sensiblement meilleures en mode sans capteur. Le cadre reformulé, qui évite l’estimation explicite du flux rotorique, a égalé ou surpassé le schéma conventionnel en régime permanent et atteint la vitesse désirée plus rapidement, malgré un nombre réduit de variables d’état. Parmi les méthodes en temps discret, l’approche basée sur Taylor s’est distinguée : elle a fourni les plus faibles erreurs de vitesse et de flux et la réponse dynamique la plus rapide, avec une augmentation modérée du coût de calcul et une légère hausse de l’ondulation de couple. Les méthodes de Runge–Kutta d’ordre supérieur, bien que théoriquement plus raffinées, ont offert peu d’avantages pratiques car elles ne peuvent pas exploiter pleinement l’information sur les entrées futures dans ce contexte de commande. Dans l’ensemble, l’étude suggère que des modèles numériques de plus haute précision, conçus avec soin, peuvent rendre les variateurs sans capteur pour moteurs asynchrones à la fois plus simples et plus précis — une combinaison séduisante pour des applications industrielles exigeantes.
Citation: Herrera-Hernández, R., Reusser, C., Carvajal, R. et al. Reformulated predictive torque and flux control with a full-order adaptive observer and accurate discrete-time models for sensorless induction machine drives. Sci Rep 16, 12757 (2026). https://doi.org/10.1038/s41598-026-41944-y
Mots-clés: commande de moteur sans capteur, entraînements de machines à induction, commande prédictive par modèle, observateurs adaptatifs, modélisation en temps discret