Clear Sky Science · pl
Przeformułowane predykcyjne sterowanie momentem i strumieniem z obserwatorem adaptacyjnym pełnego rzędu oraz dokładnymi modelami dyskretnymi dla bezczujnikowych napędów maszyn indukcyjnych
Inteligentniejsze silniki bez delikatnych czujników
Silniki elektryczne są wszędzie — od taśm produkcyjnych po turbiny wiatrowe — cicho przekształcając energię elektryczną w ruch. Utrzymanie ich wydajnej pracy zwykle wymaga precyzyjnych czujników do śledzenia prędkości i pól magnetycznych, lecz te urządzenia mogą zawodzić w surowych warunkach przemysłowych. Artykuł bada sposób na dokładne sterowanie mocnymi silnikami przemysłowymi bez takich czujników, wykorzystując jedynie pomiary elektryczne i sprytne metody matematyczne zaimplementowane w oprogramowaniu sterującym.
Dlaczego rezygnować ze sprzętowych czujników?
Silniki indukcyjne przemysłowe są popularne, ponieważ są wytrzymałe, tanie i mogą pracować w szerokim zakresie prędkości. Tradycyjnie inżynierowie polegają na czujnikach montowanych na wale silnika lub w układzie magnetycznym do pomiaru prędkości i strumienia magnetycznego. Urządzenia te są jednak podatne na kurz, drgania, wysoką temperaturę i zakłócenia elektromagnetyczne, a także zwiększają koszty i nakłady konserwacyjne. Coraz częściej stosuje się więc napędy „bezczujnikowe”, w których system sterowania estymuje wewnętrzny stan silnika na podstawie łatwo mierzalnych prądów stojana na jego zaciskach. Uzyskanie tego w sposób niezawodny jest wyzwaniem: nawet niewielka nieścisłość modelu wewnętrznego może pogorszyć osiągi, powodując dodatkowe straty, pulsacje momentu lub niestabilne zachowanie.
Przekształcanie równań w cyfrowego bliźniaka
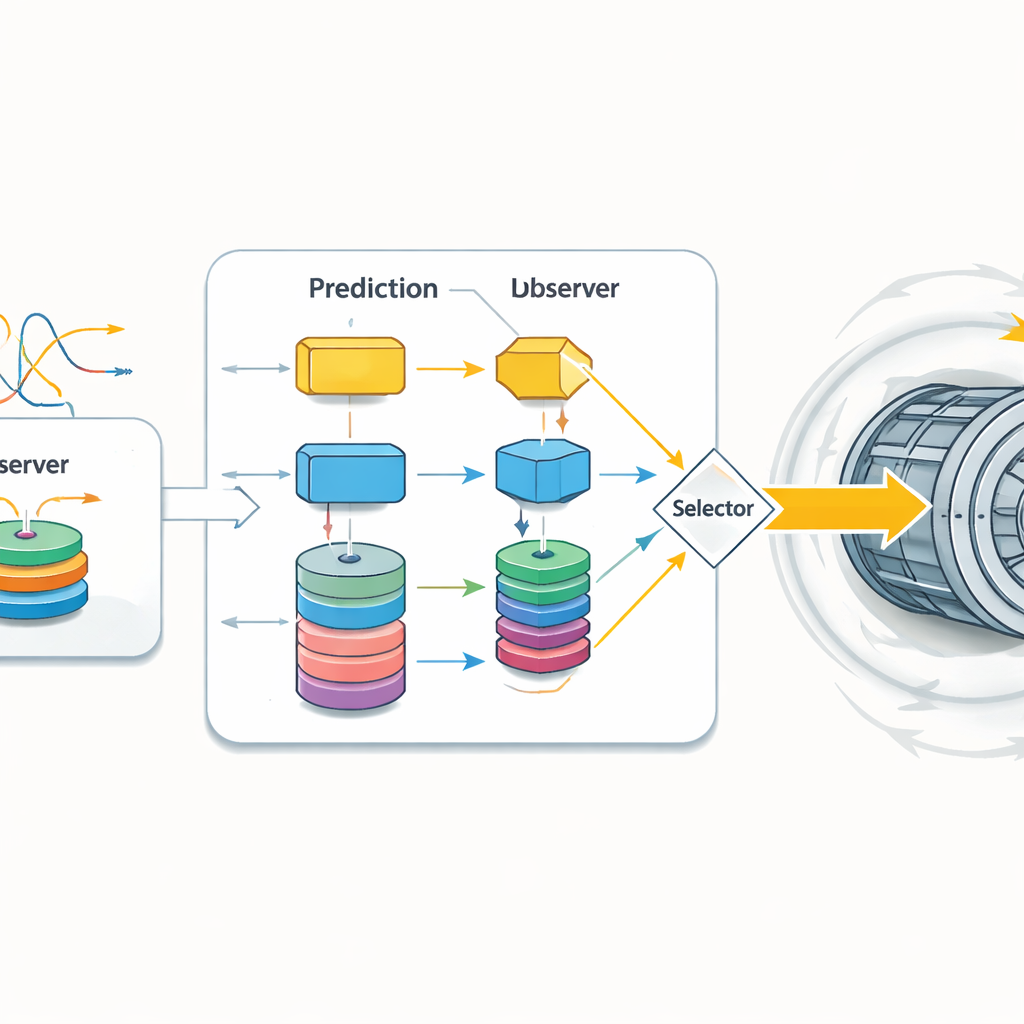
Autorzy koncentrują się na klasie technik zwanych sterowaniem predykcyjnym modelowym, które wykorzystuje cyfrowego „bliźniaka” silnika do prognozowania, co się stanie przy różnych przebiegach napięcia. Na podstawie tych prognoz kontroler wybiera wariant, który powinien zapewnić pożądany moment i strumień magnetyczny w następnej chwili. Aby śledzić niemierzalne wielkości wewnętrzne, stosują obserwator adaptacyjny pełnego rzędu — strukturę matematyczną, która stale udoskonala estymaty prądu, strumienia magnetycznego i prędkości na podstawie rozbieżności między przewidywaniem a pomiarem. Kluczową innowacją jest przepisanie modelu silnika tak, by jako zmienne stanu wykorzystywać tylko prąd stojana i strumień stojana, eliminując strumień wirnika z równań. Zmniejsza to liczbę wielkości do śledzenia, upraszcza obserwator i wzmacnia związek między modelem a tym, co faktycznie ma znaczenie dla sterowania momentem.
Dokładniejsze modele dyskretne dla sterowania cyfrowego
Ponieważ rzeczywiste sterowniki działają w krokach czasu dyskretnego, równania ciągłe muszą być przybliżone jako reguły aktualizacji krok po kroku. Większość napędów opiera się na prostej metodzie Eulera, łatwej w obliczeniach, lecz mogącej stać się niedokładną, jeśli częstotliwość próbkowania nie jest bardzo wysoka. Autorzy badają bardziej precyzyjne alternatywy oparte na rozwinięciach Taylora i metodach Rungego–Kutty, które opisują ewolucję stanu silnika w przedziale próbkowania z wykorzystaniem informacji wyższych rzędów. Wyprowadzają wersje dyskretne drugiego i wyższych rzędów spójne zarówno dla obserwatora, jak i kontrolera predykcyjnego. Chociaż metody te wymagają większej liczby obliczeń na krok, obiecują znacznie lepszą dokładność numeryczną przy praktycznych częstotliwościach próbkowania, co potencjalnie poprawia zarówno estymację ukrytych zmiennych, jak i jakość decyzji sterujących.
Testy algorytmów w czasie rzeczywistym
Aby sprawdzić, jak te pomysły sprawdzają się w praktyce, badacze zbudowali układ sprzęt-w-pętli. Symulator czasu rzeczywistego emulował silnik indukcyjny o mocy 4 kW oraz jego elektronikę mocy, podczas gdy algorytmy sterowania bezczujnikowego działały na oddzielnym rdzeniu procesora, tak jak w rzeczywistym napędzie przemysłowym. Pozwoliło to na szybkie, powtarzalne eksperymenty z różnymi wariantami modeli. Porównali tradycyjny obserwator i kontroler z ich przeformułowanymi wersjami, a także zmierzyli się z dyskretyzacjami Euler, Taylor i Rungego–Kutty. Oceniali nie tylko, jak ściśle moment, prędkość i strumień podążają za zadanymi wartościami, lecz także, jak szybko układ ustala się po zmianach prędkości, jak duże są pulsacje momentu i ile czasu procesora konsumuje każda metoda.
Co wyniki oznaczają dla rzeczywistych maszyn
Testy wykazały, że samo zwiększenie dokładności obserwatora — bez zmiany podstawowej strategii sterowania predykcyjnego — już przynosi zauważalną poprawę działania bezczujnikowego. Przeformułowane podejście, które unika jawnej estymacji strumienia wirnika, dorównywało lub przewyższało konwencjonalny schemat w zachowaniu stacjonarnym i osiągało zadaną prędkość szybciej, pomimo polegania na mniejszej liczbie zmiennych stanu. Wśród metod dyskretnych wyróżniło się podejście oparte na rozwinięciu Taylora: zapewniało najmniejsze błędy prędkości i strumienia oraz najszybszą odpowiedź dynamiczną, przy umiarkowanym wzroście kosztów obliczeniowych i jedynie nieznacznym wzroście pulsacji momentu. Metody Rungego–Kutty wyższych rzędów, choć teoretycznie bardziej wyrafinowane, przyniosły niewielkie praktyczne korzyści, ponieważ nie mogą w pełni wykorzystać informacji o przyszłych wejściach w tym ustawieniu sterowania. Ogólnie rzecz biorąc, badanie sugeruje, że starannie zaprojektowane, wysoce dokładne modele cyfrowe mogą uczynić wytrzymałe bezczujnikowe napędy indukcyjne jednocześnie prostszymi i bardziej precyzyjnymi — atrakcyjne połączenie dla wymagających zastosowań przemysłowych.
Cytowanie: Herrera-Hernández, R., Reusser, C., Carvajal, R. et al. Reformulated predictive torque and flux control with a full-order adaptive observer and accurate discrete-time models for sensorless induction machine drives. Sci Rep 16, 12757 (2026). https://doi.org/10.1038/s41598-026-41944-y
Słowa kluczowe: sterowanie silnikiem bez czujników, napędy maszyn indukcyjnych, sterowanie predykcyjne modelowe, obserwatory adaptacyjne, modelowanie w czasie dyskretnym