Clear Sky Science · tr
Sensörsüz indüksiyon makinesi sürücüleri için tam mertebe adaptif gözlemci ve doğru ayrık-zaman modelleri ile yeniden formüle edilmiş öngörücü tork ve akı kontrolü
Hassas Sensörler Olmadan Daha Akıllı Motorlar
Elektrikli motorlar fabrikalardaki konveyör bantlarından rüzgâr türbinlerine kadar her yerde—elektriği harekete sessizce dönüştürüyor. Bunları verimli çalıştırmak genellikle iç hız ve manyetik alanlarını izlemek için hassas sensörler gerektirir, ancak bu sensörler zorlu endüstriyel ortamlarda arızalanabilir. Bu makale, yalnızca elektriksel ölçümler ve kontrol yazılımına gömülü akıllı matematik kullanarak güçlü endüstriyel motorları bu tür sensörler olmadan doğru çalıştırmanın bir yolunu araştırıyor.
Neden Donanım Sensörlerinden Vazgeçelim?
Endüstriyel indüksiyon motorları sağlam, ucuz olmaları ve geniş bir hız aralığında çalışabilmeleri nedeniyle popülerdir. Geleneksel olarak mühendisler, hıza ve manyetik akıya ilişkin ölçümler almak için motor şaftına veya manyetik devreye takılan donanım sensörlerine güvenirler. Ancak bu cihazlar toz, titreşim, ısı ve elektromanyetik parazite karşı savunmasızdır ve maliyet ile bakım gerektirir. Bu nedenle giderek artan bir eğilim, kontrol sisteminin motorun terminalindeki kolayca ölçülen elektrik akımlarından iç durumunu tahmin ettiği “sensörsüz” sürücüler geliştirmektir. Bunu güvenilir şekilde başarmak zordur: motorun iç modelinde en ufak bir doğruluk eksikliği performansı etkileyebilir; bu da ek kayıplara, tork dalgalanmasına veya kararsız davranışa yol açabilir.
Denklemleri Dijital İkize Dönüştürmek
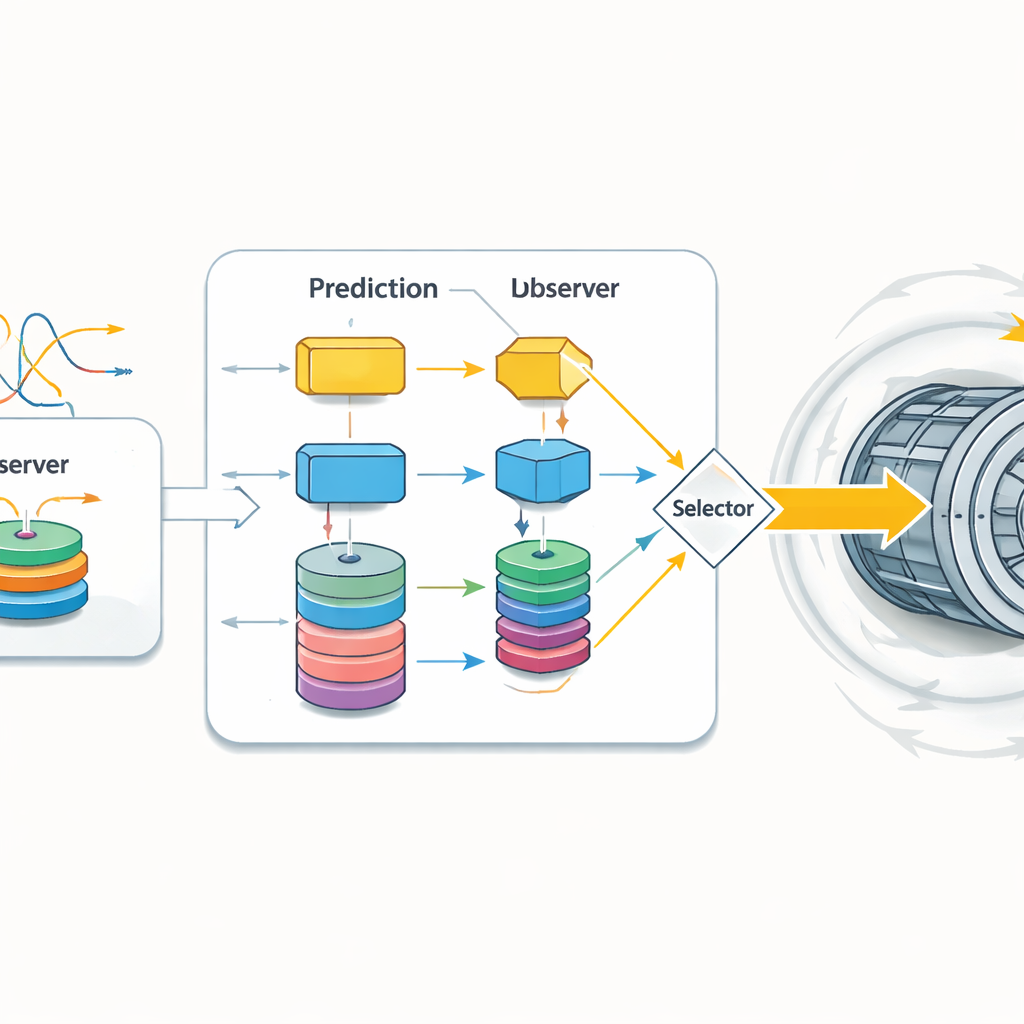
Yazarlar, hangi gerilim komutlarının uygulanacağına göre ne olacağını tahmin etmek için motorun dijital bir “ikizini” kullanan model öngörücü kontrol adı verilen teknikler sınıfına odaklanıyor. Bu tahminlerden kontrolör, bir sonraki anda istenen tork ve manyetik akıyı sağlayacak seçeneği seçer. Ölçülmeyen iç nicelikleri izlemek için, tahmin ile ölçüm arasındaki uyumsuzluğa dayanarak akım, manyetik akı ve hızı sürekli olarak rafine eden tam mertebeli bir adaptif gözlemci kullanıyorlar. Temel yenilik, stator akımı ve stator manyetik akısını durum değişkenleri olarak kullanıp rotor akısını denklemlerden çıkartarak motor modelini yeniden yazmaktır. Bu, izlenmesi gereken niceliklerin sayısını azaltır, gözlemciyi basitleştirir ve modellenen ile tork kontrolü için gerçekten önemli olan arasındaki bağı kuvvetlendirir.
Dijital Kontrol İçin Daha Keskin Ayrık-Zaman Modelleri
Gerçek kontrolörler ayrık zaman adımlarında çalıştığı için sürekli motor denklemleri adım adım güncelleme kuralları olarak yaklaşıklanmalıdır. Çoğu sürücü basit ve hesaplaması kolay olan Euler yöntemine dayanır, fakat örnekleme hızı çok yüksek değilse bu yöntem hatalı olabilir. Yazarlar, örnekleme aralığı boyunca motor durumunun daha yüksek mertebeden bilgiyi kullanarak nasıl evrildiğini temsil eden Taylor serileri ve Runge–Kutta yöntemlerine dayalı daha kesin alternatifleri inceliyorlar. Hem gözlemci hem de öngörücü kontrolör için tutarlı şekilde ikinci ve daha yüksek mertebeli bu ayrık-zaman modellerini türetiyorlar. Bu yöntemler adım başına daha fazla hesaplama gerektirse de, pratik örnekleme hızlarında çok daha iyi sayısal doğruluk vaat eder; bu da gizli değişkenlerin tahminini ve kontrol kararlarının kalitesini iyileştirebilir.
Algoritmaları Gerçek Zamanlı Bir Sınamaya Koymak
Bu fikirlerin pratikte nasıl performans gösterdiğini görmek için araştırmacılar donanım içinde döngü (hardware-in-the-loop) bir kurulum inşa ettiler. Gerçek zamanlı bir simülatör 4 kilovatlık bir indüksiyon motorunu ve güç elektroniğini taklit ederken, sensörsüz kontrol algoritmaları ayrı bir işlemci çekirdeğinde, tıpkı gerçek bir endüstriyel sürücuda olduğu gibi çalıştırıldı. Bu, farklı model varyantlarıyla hızlı ve tekrarlanabilir deneylere olanak verdi. Geleneksel gözlemci ve kontrolörleri yeniden formüle edilmiş versiyonlarıyla karşılaştırdılar ve ayrıca Euler, Taylor ve Runge–Kutta ayrıklaştırmalarını birbirine karşı sınadılar. Değerlendirme yalnızca tork, hız ve akının hedeflerine ne kadar yakın takip ettiğini değil, aynı zamanda hız değişikliklerinden sonra sistemin ne kadar çabuk kararlı duruma geldiğini, tork dalgalanmasının büyüklüğünü ve her yöntemin ne kadar işlemci zamanı tükettiğini de kapsadı.
Sonuçların Gerçek Makineler İçin Anlamı
Testler, temel öngörücü kontrol stratejisini değiştirmeden yalnızca gözlemcinin doğruluğunu iyileştirmenin bile sensörsüz performansı belirgin şekilde artırdığını gösterdi. Rotor akısı tahmininden kaçınan yeniden formüle edilmiş çerçeve, daha az durum değişkenine dayanmasına rağmen kararlı hal davranışında geleneksel şemaya eşit veya üstün performans sergiledi ve istenen hıza daha hızlı ulaştı. Ayrık-zaman yöntemleri arasında Taylor tabanlı yaklaşım öne çıktı: orta düzeyde artan hesaplama maliyeti ve yalnızca hafif bir tork dalgalanması artışıyla en küçük hız ve akı hatalarını ve en hızlı dinamik cevabı sundu. Teorik olarak daha rafine olan daha yüksek mertebeli Runge–Kutta yöntemleri ise, bu kontrol düzeninde gelecek giriş bilgilerini tam olarak kullanamamaları nedeniyle pratikte çok az fayda sağladı. Genel olarak çalışma, iyi tasarlanmış, daha yüksek doğruluklu dijital modellerin sağlam sensörsüz indüksiyon motoru sürücülerini hem daha basit hem de daha hassas hale getirebileceğini; bu ikilinin zorlu endüstriyel uygulamalar için çekici olduğunu öne sürüyor.
Atıf: Herrera-Hernández, R., Reusser, C., Carvajal, R. et al. Reformulated predictive torque and flux control with a full-order adaptive observer and accurate discrete-time models for sensorless induction machine drives. Sci Rep 16, 12757 (2026). https://doi.org/10.1038/s41598-026-41944-y
Anahtar kelimeler: sensörsüz motor kontrolü, indüksiyon makine sürücüleri, model öngörücü kontrol, adaptif gözlemciler, ayrık zaman modelleme