Clear Sky Science · de
Neugestaltete prädiktive Drehmoment- und Flussregelung mit einem vollordentlichen adaptiven Beobachter und genauen diskreten Modellen für sensorlose Asynchronmaschinen-Antriebe
Intelligentere Motoren ohne empfindliche Sensoren
Elektromotoren sind allgegenwärtig – von Förderbändern in Fabriken bis zu Windturbinen – und wandeln leise Elektrizität in Bewegung um. Damit sie effizient laufen, werden üblicherweise empfindliche Sensoren benötigt, die ihre innere Drehzahl und magnetischen Felder überwachen; diese Sensoren können jedoch in rauen Industrieumgebungen ausfallen. Diese Arbeit untersucht einen Weg, leistungsstarke Industriemotoren genau anzutreiben, ohne solche Sensoren zu verwenden, allein mit elektrischen Messgrößen und ausgeklügelter Mathematik, die in der Steuerungssoftware steckt.
Warum auf Hardware-Sensoren verzichten?
Industrielle Asynchronmotoren sind beliebt, weil sie robust, kostengünstig und über einen weiten Drehzahlbereich einsetzbar sind. Traditionell verlassen sich Ingenieure auf Hardware-Sensoren, die an der Motorwelle oder im magnetischen Kreis angebracht sind, um Drehzahl und magnetischen Fluss zu messen. Diese Geräte sind jedoch anfällig für Staub, Vibrationen, Hitze und elektromagnetische Störungen und erhöhen Kosten sowie Wartungsaufwand. Ein wachsender Trend geht daher zu „sensorlosen“ Antrieben, bei denen das Regelsystem den inneren Zustand des Motors aus den leicht messbaren elektrischen Strömen an den Anschlüssen schätzt. Dies zuverlässig zu erreichen ist eine Herausforderung: Ist das interne Modell des Motors auch nur leicht ungenau, kann die Performance leiden, was zu höheren Verlusten, Drehmomentwelligkeit oder instabilem Verhalten führen kann.
Gleichungen in einen digitalen Zwilling verwandeln
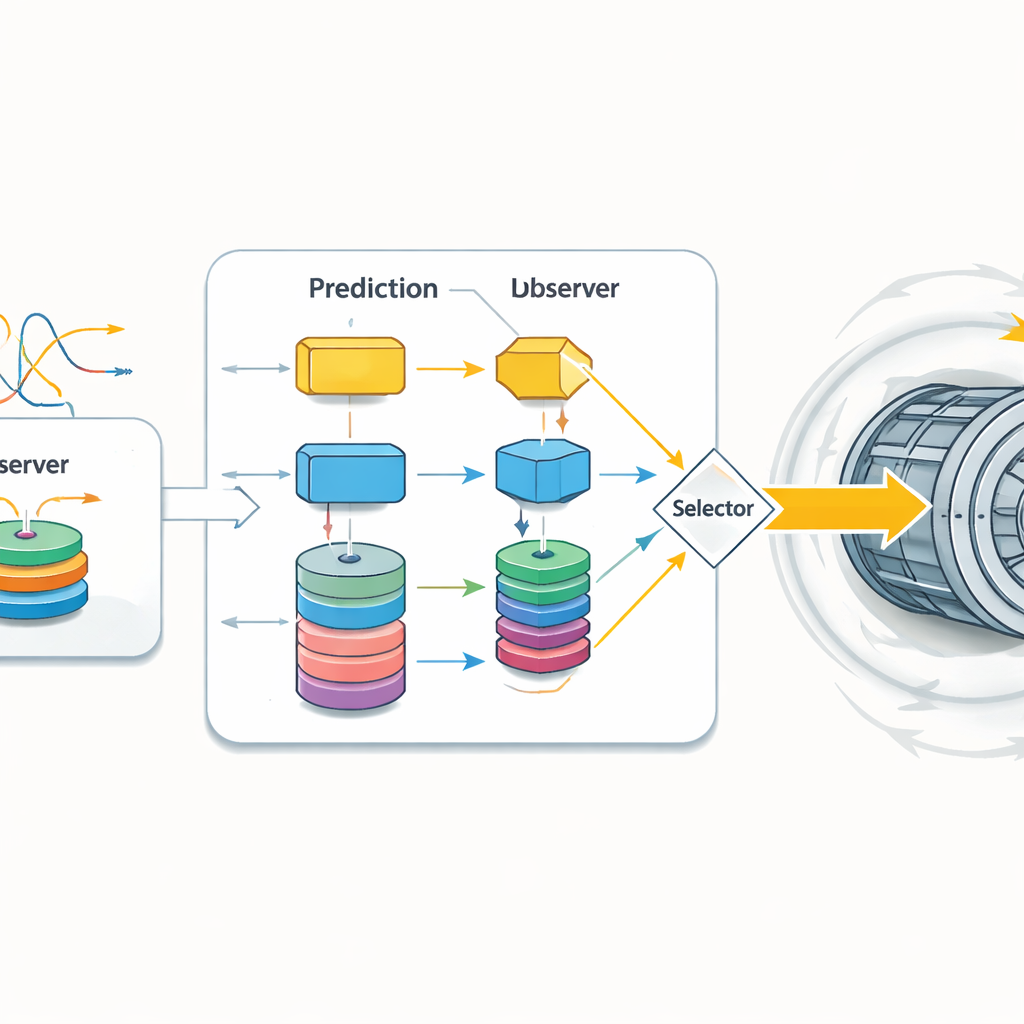
Die Autoren konzentrieren sich auf eine Klasse von Techniken, die als modellprädiktive Regelung bekannt sind und einen digitalen „Zwilling“ des Motors nutzen, um vorherzusagen, was passiert, wenn verschiedene Spannungsbefehle angelegt werden. Aus diesen Vorhersagen wählt der Regler die Option, die im nächsten Augenblick das gewünschte Drehmoment und den gewünschten magnetischen Fluss liefern sollte. Um die nicht gemessenen inneren Größen nachzuführen, verwenden sie einen vollordentlichen adaptiven Beobachter, eine mathematische Struktur, die ihre Schätzungen von Strom, magnetischem Fluss und Drehzahl kontinuierlich anhand der Abweichung zwischen Vorhersage und Messung verfeinert. Die zentrale Innovation besteht darin, das Motormodell so umzuformulieren, dass nur noch Statorstrom und statorischer magnetischer Fluss als Zustandsvariablen verwendet werden und der Rotorfluss aus den Gleichungen entfernt wird. Das reduziert die Anzahl der nachzuführenden Größen, vereinfacht den Beobachter und stärkt die Verbindung zwischen dem Modell und dem, was für die Drehmomentregelung tatsächlich relevant ist.
Präzisere diskrete Modelle für digitale Regelung
Da reale Regler in diskreten Zeitschritten arbeiten, müssen kontinuierliche Motorgleichungen als schrittweise Aktualisierungsregeln angenähert werden. Die meisten Antriebe verlassen sich auf die einfache Euler-Methode, die leicht zu berechnen ist, aber ungenau werden kann, wenn die Abtastrate nicht extrem hoch ist. Die Autoren untersuchen genauere Alternativen auf Basis von Taylor-Reihen und Runge–Kutta-Verfahren, die beschreiben, wie sich der Motorzustand über ein Abtastintervall mithilfe höherer Ordnung entwickelt. Sie leiten konsistent zweifache und höherordentliche Versionen dieser diskreten Modelle sowohl für den Beobachter als auch für den prädiktiven Regler her. Zwar erfordern diese Verfahren pro Schritt mehr Rechenaufwand, doch versprechen sie bei praxisgerechten Abtastraten deutlich bessere numerische Genauigkeit, was sowohl die Schätzung versteckter Größen als auch die Qualität der Regelentscheidungen verbessern kann.
Die Algorithmen im Echtzeit-Test
Um die praktische Leistungsfähigkeit dieser Ideen zu prüfen, bauten die Forscher ein Hardware-in-the-Loop-Setup auf. Ein Echtzeit-Simulator emulierte einen 4-Kilowatt-Asynchronmotor und seine Leistungselektronik, während die sensorlosen Regelalgorithmen auf einem separaten Prozessorkern liefen, so wie in einem echten Industrieantrieb. Das ermöglichte schnelle, reproduzierbare Experimente mit verschiedenen Modellvarianten. Sie verglichen den traditionellen Beobachter und Regler mit ihren umformulierten Versionen und stellten Euler-, Taylor- und Runge–Kutta-Disretisierungen gegeneinander. Bewertet wurde nicht nur, wie genau Drehmoment, Geschwindigkeit und Fluss ihre Sollwerte einhielten, sondern auch, wie schnell das System nach Drehzahlanforderungen eingespannt war, wie groß die Drehmomentwelligkeit war und wie viel Prozessorzeit jede Methode beanspruchte.
Was die Ergebnisse für reale Maschinen bedeuten
Die Tests zeigten, dass allein eine Verbesserung der Beobachtergenauigkeit – ohne die grundlegende prädiktive Regelstrategie zu ändern – bereits spürbar bessere sensorlose Leistung liefert. Das umformulierte Framework, das auf eine explizite Rotorfluss-Schätzung verzichtet, erreichte im stationären Betrieb gleichwertige oder bessere Ergebnisse als das konventionelle Schema und die gewünschte Drehzahl schneller, obwohl weniger Zustandsvariablen nachgeführt wurden. Unter den diskreten Methoden hob sich der Taylor-basierte Ansatz hervor: Er lieferte die geringsten Fehler bei Drehzahl und Fluss und die schnellste dynamische Reaktion bei moderatem Mehrverbrauch an Rechenzeit und nur geringfügig erhöhter Drehmomentwelligkeit. Höherordentliche Runge–Kutta-Verfahren boten, obwohl theoretisch feiner, wenig praktischen Nutzen, da sie in diesem Regelungszusammenhang nicht vollständig von zukünftigen Eingangsinformationen profitieren können. Insgesamt legt die Studie nahe, dass sorgfältig entworfene, höhergenaue digitale Modelle sensorlose robuste Asynchronantriebe sowohl einfacher als auch präziser machen können – eine attraktive Kombination für anspruchsvolle industrielle Anwendungen.
Zitation: Herrera-Hernández, R., Reusser, C., Carvajal, R. et al. Reformulated predictive torque and flux control with a full-order adaptive observer and accurate discrete-time models for sensorless induction machine drives. Sci Rep 16, 12757 (2026). https://doi.org/10.1038/s41598-026-41944-y
Schlüsselwörter: sensorlose Motorregelung, Asynchronmaschinen-Antriebe, modellprädiktive Regelung, adaptive Beobachter, diskrete Zeitmodellierung