Clear Sky Science · it
Controllo predittivo riformulato di coppia e flusso con un osservatore adattivo a ordine completo e modelli discreti accurati per azionamenti a macchina a induzione senza sensori
Motori più intelligenti senza sensori fragili
I motori elettrici sono ovunque — dalle nastri trasportatori delle fabbriche alle turbine eoliche — convertendo silenziosamente elettricità in movimento. Mantenere la loro efficienza di norma richiede sensori delicati per monitorare velocità e campi magnetici interni, ma questi sensori possono guastarsi in ambienti industriali difficili. Questo articolo esplora un modo per pilotare con precisione potenti motori industriali senza tali sensori, utilizzando solo misure elettriche e matematica ingegnosa incorporata nel software di controllo.
Perché eliminare i sensori hardware?
I motori a induzione industriali sono diffusi perché sono robusti, economici e possono funzionare su un ampio intervallo di velocità. Tradizionalmente, gli ingegneri si affidano a sensori hardware collegati all’albero del motore o al circuito magnetico per misurare la velocità e il flusso magnetico. Questi dispositivi, tuttavia, sono vulnerabili a polvere, vibrazioni, calore e interferenze elettromagnetiche, e aumentano i costi e la manutenzione. Perciò sta crescendo la tendenza a realizzare azionamenti “senza sensori”, in cui il sistema di controllo stima lo stato interno del motore a partire dalle correnti elettriche misurate facilmente ai suoi terminali. Raggiungere questa affidabilità è una sfida: se il modello interno del motore è anche solo leggermente impreciso, le prestazioni possono risentirne, causando maggiori perdite, ondulazione della coppia o comportamenti instabili.
Trasformare le equazioni in un gemello digitale
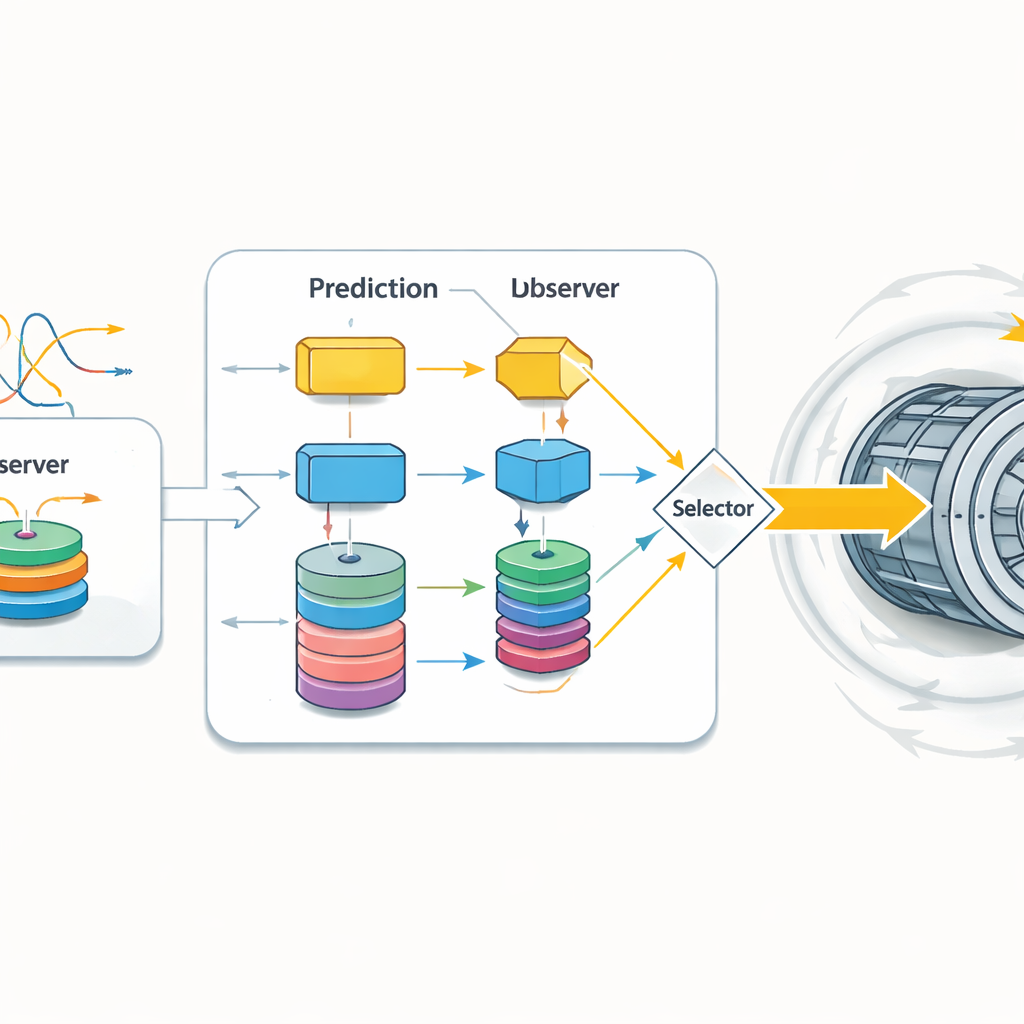
Gli autori si concentrano su una classe di tecniche chiamate controllo predittivo modello, che utilizza un “gemello” digitale del motore per prevedere cosa succederà se vengono applicati diversi comandi di tensione. Da queste previsioni, il controllore sceglie l’opzione che dovrebbe fornire la coppia e il flusso magnetico desiderati nell’istante successivo. Per tenere traccia delle grandezze interne non misurate, utilizzano un osservatore adattivo a ordine completo, una struttura matematica che affina continuamente le sue stime di corrente, flusso magnetico e velocità in base allo scostamento tra previsione e misura. L’innovazione centrale è riscrivere il modello del motore usando solo la corrente statorica e il flusso magnetico statorico come variabili di stato, rimuovendo il flusso del rotore dalle equazioni. Questo riduce il numero di grandezze da stimare, semplifica l’osservatore e rafforza il legame tra ciò che è modellato e ciò che conta realmente per il controllo della coppia.
Modelli tempo-discreto più accurati per il controllo digitale
Poiché i controllori reali operano a passi temporali discreti, le equazioni continue del motore devono essere approssimate con regole di aggiornamento passo-passo. La maggior parte degli azionamenti si basa sul semplice metodo di Eulero, che è facile da calcolare ma può diventare impreciso se la frequenza di campionamento non è estremamente alta. Gli autori indagano alternative più precise basate sulle serie di Taylor e sui metodi di Runge–Kutta, che rappresentano l’evoluzione dello stato del motore su un intervallo di campionamento usando informazioni di ordine superiore. Sviluppano versioni di secondo e ordine superiore di questi modelli tempo-discreto in modo coerente sia per l’osservatore sia per il controllore predittivo. Sebbene questi metodi richiedano più calcoli per passo, promettono una precisione numerica molto migliore a frequenze di campionamento pratiche, migliorando potenzialmente sia la stima delle variabili nascoste sia la qualità delle decisioni di controllo.
Mettere gli algoritmi alla prova in tempo reale
Per verificare come si comportano queste idee nella pratica, i ricercatori hanno costruito un sistema hardware-in-the-loop. Un simulatore in tempo reale ha emulato un motore a induzione da 4 kilowatt e la sua elettronica di potenza, mentre gli algoritmi di controllo senza sensori sono stati eseguiti su un core processore separato, proprio come in un azionamento industriale reale. Questo ha permesso esperimenti rapidi e ripetibili con diverse varianti del modello. Hanno confrontato l’osservatore e il controllore tradizionali con le loro versioni riformulate e hanno anche messo a confronto le discretizzazioni di Eulero, Taylor e Runge–Kutta. Hanno valutato non solo quanto fedelmente coppia, velocità e flusso seguivano i loro riferimenti, ma anche la rapidità con cui il sistema si stabilizzava dopo variazioni di velocità, l’entità dell’ondulazione di coppia e quanto tempo processore ciascun metodo consumava.
Cosa significano i risultati per le macchine reali
I test hanno mostrato che migliorare semplicemente l’accuratezza dell’osservatore — senza cambiare la strategia di controllo predittivo di base — offre già prestazioni senza sensori nettamente migliori. Il quadro riformulato, che evita la stima esplicita del flusso del rotore, ha eguagliato o superato lo schema convenzionale nel comportamento a regime e ha raggiunto la velocità desiderata più rapidamente, pur facendo affidamento su meno variabili di stato. Tra i metodi tempo-discreto, l’approccio basato su Taylor si è distinto: ha fornito gli errori di velocità e flusso più piccoli e la risposta dinamica più rapida, con un aumento moderato del costo computazionale e solo un lieve incremento dell’ondulazione di coppia. I metodi di Runge–Kutta di ordine superiore, sebbene teoricamente più raffinati, hanno offerto pochi benefici pratici perché non possono sfruttare pienamente le informazioni sugli ingressi futuri in questo contesto di controllo. Nel complesso, lo studio suggerisce che modelli digitali a maggiore accuratezza, progettati con cura, possono rendere gli azionamenti a induzione senza sensori più semplici e più precisi — una combinazione interessante per applicazioni industriali esigenti.
Citazione: Herrera-Hernández, R., Reusser, C., Carvajal, R. et al. Reformulated predictive torque and flux control with a full-order adaptive observer and accurate discrete-time models for sensorless induction machine drives. Sci Rep 16, 12757 (2026). https://doi.org/10.1038/s41598-026-41944-y
Parole chiave: controllo motore senza sensori, azionamenti per macchine a induzione, controllo predittivo modello, osservatori adattivi, modellazione tempo discreto