Clear Sky Science · ja
完全次元適応オブザーバと高精度離散時間モデルによる再定式化予測トルク・フラックス制御を用いたセンサレス誘導機駆動
壊れやすいセンサなしで賢いモーターを
電動機は工場のコンベアベルトから風力タービンまで至る所にあり、静かに電気を運動に変換している。効率よく動かし続けるには通常、内部の回転速度や磁束を追跡する繊細なセンサが必要だが、こうしたセンサは過酷な産業環境では故障しやすい。本論文は、端子で測定できる電気量と制御ソフトに組み込んだ巧みな数学だけで、強力な産業用モーターを正確に駆動する方法を探る。
なぜハードウェアセンサをやめるのか?
産業用誘導電動機は堅牢で安価、広い回転域で動作できるため広く使われている。従来は軸や磁気回路に取り付けたハードウェアセンサで速度や磁束を計測してきた。しかしこれらはほこり、振動、熱、電磁的干渉に弱く、コストや保守も増やす。そこで制御系が端子電流など容易に測れる電気量から内部状態を推定する“センサレス”駆動が注目されている。これを確実に実現するのは難しい。モータの内部モデルがわずかに不正確でも性能が低下し、損失増大やトルクリップル、あるいは不安定動作を招く可能性があるためだ。
方程式をデジタルツインに変える
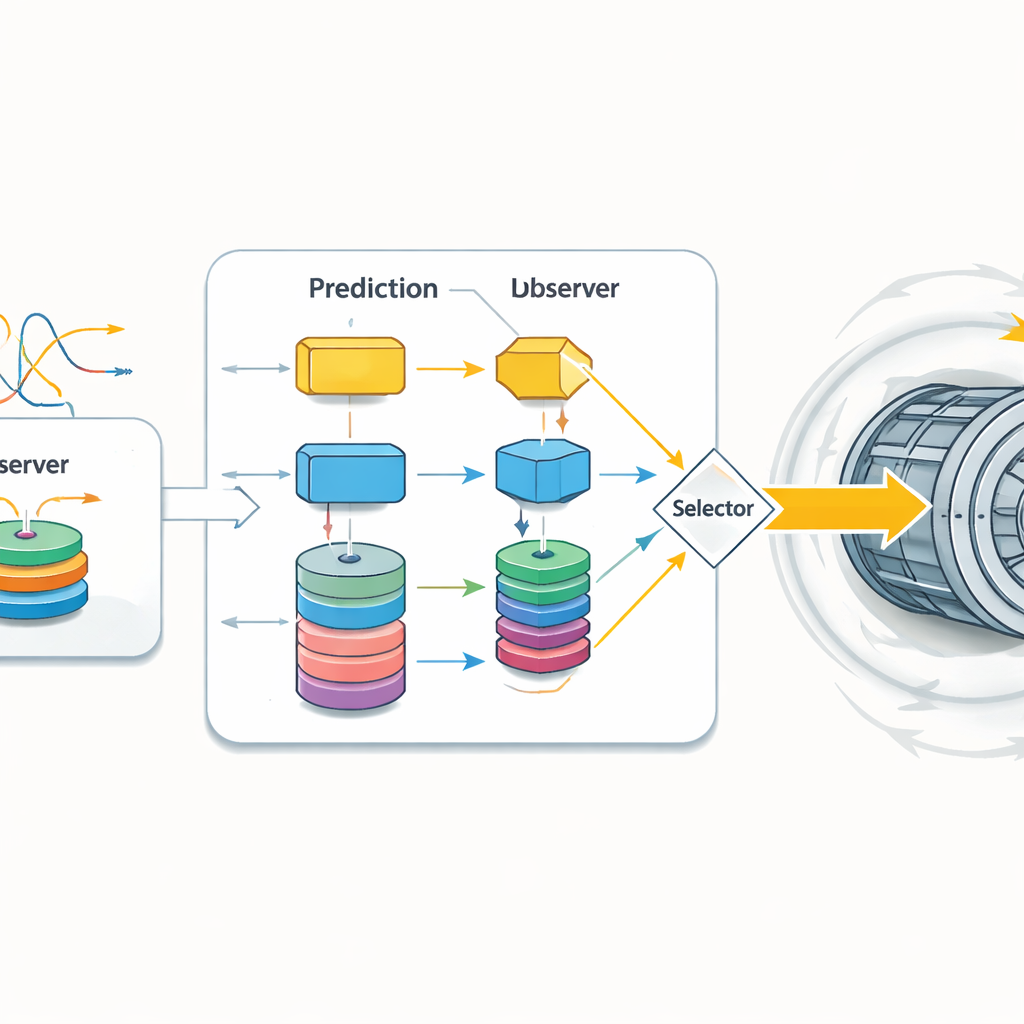
著者らはモデル予測制御と呼ばれる手法に注目する。この手法はモーターのデジタル“ツイン”を用いて、異なる電圧指令を加えたときに何が起きるかを予測する。予測に基づき、次の瞬間に望ましいトルクと磁束を与える指令を選ぶ。未測定の内部量を追跡するために、彼らは完全次元の適応オブザーバを用いる。これは予測と測定の不一致に基づき、電流、磁束、速度の推定を継続的に洗練する数学的構造である。中心的な革新は、状態変数として定常子電流と定常子磁束だけを用い、方程式から回転子磁束を除くようにモータモデルを書き換えた点だ。これにより追跡すべき量が減り、オブザーバが簡素化され、トルク制御に実際に重要なものとモデルとの結びつきが強まる。
デジタル制御のための高精度離散時間モデル
実際の制御器は離散時間で動作するため、連続時間のモータ方程式は区間ごとの更新則として近似する必要がある。多くの駆動系は計算が簡単なオイラー法に頼るが、サンプリング周波数が非常に高くないと誤差が大きくなることがある。著者らはテイラー級数やルンゲ=クッタ法に基づく、より精度の高い代替手法を検討する。これらはサンプリング間隔内での状態変化を高次の情報で表現する。観測器と予測制御器の両方に対して二次以上の離散時間モデルを一貫して導出した。これらの手法はステップごとの計算量が増えるが、実用的なサンプリングレートで数値精度が大幅に向上することが期待され、隠れた変数の推定精度や制御判断の品質の改善につながる可能性がある。
アルゴリズムをリアルタイムで試す
これらのアイデアの実際の性能を検証するため、研究者らはハードウェアインザループのセットアップを構築した。リアルタイムシミュレータが4キロワットの誘導機とそのパワーエレクトロニクスを模擬し、センサレス制御アルゴリズムは別のプロセッサコア上で実行された。これは実際の産業用ドライブと同様の環境で、異なるモデル変種を速やかに再現可能に試験することを可能にした。従来のオブザーバと制御器を再定式化したものと比較し、オイラー、テイラー、ルンゲ=クッタの離散化を相互に比較した。評価はトルク、速度、磁束が目標にどれだけ近いかだけでなく、速度変化後の定常化の速さ、トルクリップルの大きさ、各手法の処理時間も含めて行った。
実機にとっての結果の意味
試験の結果、基本的な予測制御戦略を変えずにオブザーバの精度を向上させるだけでも、センサレス性能が明らかに改善することが示された。回転子磁束の明示的推定を回避する再定式化フレームワークは、状態変数を減らしながら定常状態の挙動で従来方式と同等かそれ以上の性能を示し、目標速度への到達も速かった。離散時間手法の中ではテイラーに基づくアプローチが際立ち、速度誤差と磁束誤差が最小で動的応答も最も速く、計算コストは中程度に増加するのみでトルクリップルのわずかな増加にとどまった。高次のルンゲ=クッタ法は理論的にはより精密であるが、本制御設定では将来入力情報を十分に活用できないため実用上の利点はほとんどなかった。総じて、本研究は注意深く設計された高精度なデジタルモデルが、堅牢なセンサレス誘導機駆動をより簡素かつ高精度にできることを示しており、過酷な産業用途にとって魅力的な組合せであることが示唆される。
引用: Herrera-Hernández, R., Reusser, C., Carvajal, R. et al. Reformulated predictive torque and flux control with a full-order adaptive observer and accurate discrete-time models for sensorless induction machine drives. Sci Rep 16, 12757 (2026). https://doi.org/10.1038/s41598-026-41944-y
キーワード: センサレスモーター制御, 誘導機駆動, モデル予測制御, 適応オブザーバ, 離散時間モデリング