Clear Sky Science · nl
Herschreven predictieve koppel- en fluxregeling met een adaptieve waarnemer van volledige orde en nauwkeurige discrete-tijdmodellen voor sensoloze inductiemachinedrives
Slimmere motoren zonder kwetsbare sensoren
Elektrische motoren zijn overal — van transportbanden in fabrieken tot windturbines — en zetten stilletjes elektriciteit om in beweging. Om ze efficiënt te laten werken zijn doorgaans gevoelige sensoren nodig om hun interne snelheid en magnetische velden te volgen, maar die sensoren kunnen falen in ruwe industriële omgevingen. Dit artikel onderzoekt een manier om krachtige industriële motoren nauwkeurig te laten draaien zonder dergelijke sensoren, alleen met elektrische metingen en slimme wiskunde in de regelsoftware.
Waarom de hardware-sensoren wegdoen?
Industriële inductiemotoren zijn populair omdat ze robuust, goedkoop en inzetbaar over een groot snelheidsbereik zijn. Traditioneel vertrouwen ingenieurs op hardware-sensoren die aan de motoras of aan het magnetische circuit zijn bevestigd om snelheid en magnetische flux te meten. Deze apparaten zijn echter kwetsbaar voor stof, trillingen, hitte en elektromagnetische storing, en ze verhogen kosten en onderhoud. Een groeiende trend is daarom het bouwen van “sensoloze” drives, waarbij het regelsysteem de interne toestand van de motor schat op basis van de eenvoudig meetbare elektrische stromen aan de klemmen. Dit betrouwbaar realiseren is een uitdaging: als het interne model van de motor ook maar iets onnauwkeurig is, kan de prestatie lijden, met extra verliezen, koppelrimpel of onstabiel gedrag tot gevolg.
Vergelijkingen omzetten in een digitale tweeling
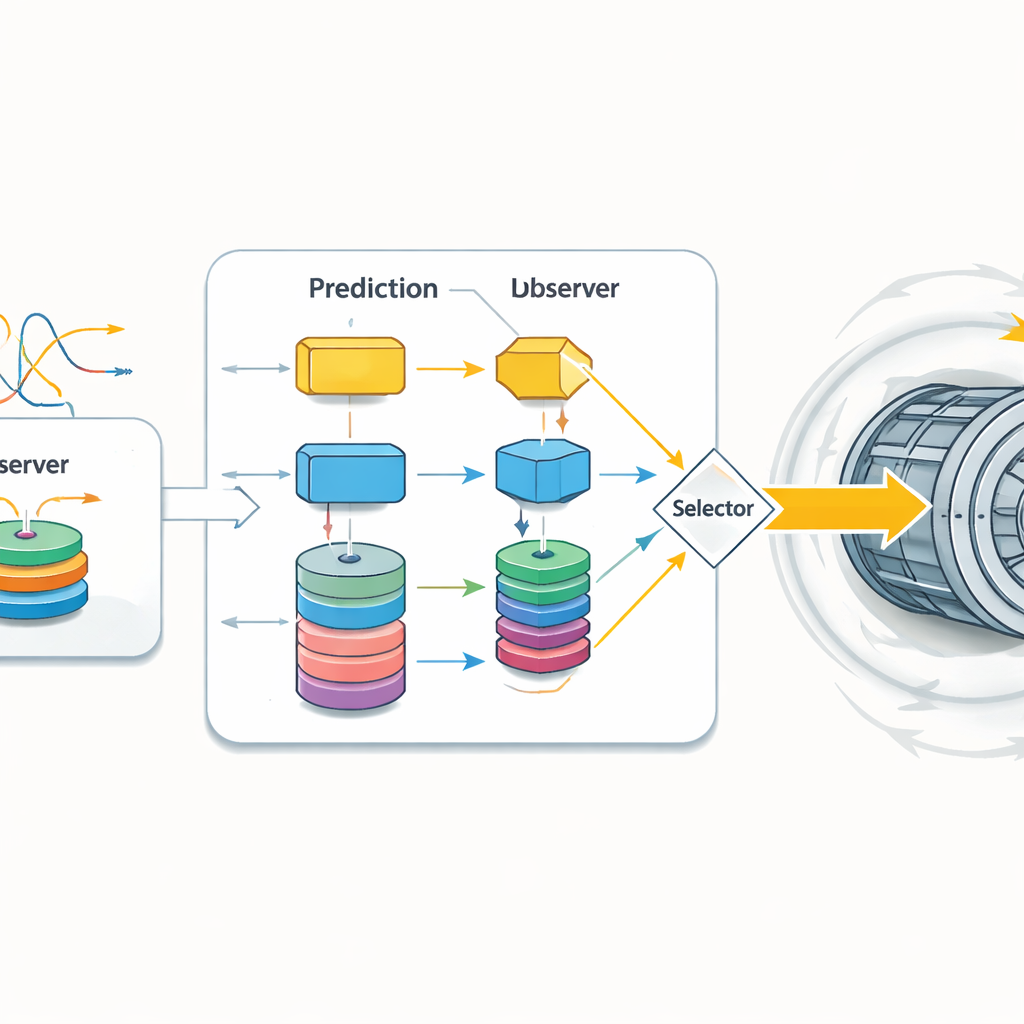
De auteurs richten zich op een klasse technieken die modelpredictieve besturing heet, waarbij een digitale “tweeling” van de motor wordt gebruikt om te voorspellen wat er gebeurt als verschillende spanningscommando’s worden toegepast. Uit deze voorspellingen kiest de regelaar de optie die het gewenste koppel en de gewenste magnetische flux in het volgende ogenblik zou moeten geven. Om de onmeetbare interne grootheden bij te houden, gebruiken ze een adaptieve waarnemer van volledige orde, een wiskundige structuur die continu zijn schattingen van stroom, magnetische flux en snelheid verfijnt op basis van de afwijking tussen voorspelling en meting. De centrale innovatie is het herschrijven van het motormodel met alleen statorstroom en statorflux als toestandsvariabelen, waarbij de rotorflux uit de vergelijkingen verdwijnt. Dit vermindert het aantal grootheden dat gevolgd moet worden, vereenvoudigt de waarnemer en versterkt de koppeling tussen wat wordt gemodelleerd en wat er werkelijk toe doet voor koppelregeling.
Scherpere discrete-tijdmodellen voor digitale regeling
Aangezien echte regelaars in discrete tijdstappen werken, moeten continue motorgelijkingen worden benaderd als stap-voor-stap update-regels. De meeste drives vertrouwen op de eenvoudige Euler-methode, die makkelijk te berekenen is maar onnauwkeurig kan worden als de bemonsteringsfrequentie niet extreem hoog is. De auteurs onderzoeken preciesere alternatieven op basis van Taylor-reeksen en Runge–Kutta-methoden, die beschrijven hoe de motorstaat over een bemonsteringsinterval evolueert met hogere-orde informatie. Ze leiden consistent tweede- en hogere-orde versies van deze discrete-tijdmodellen af voor zowel de waarnemer als de predictieve regelaar. Hoewel deze methoden per stap meer rekenwerk vereisen, beloven ze veel betere numerieke nauwkeurigheid bij praktische bemonsteringsfrequenties, wat zowel de schatting van verborgen variabelen als de kwaliteit van regelbeslissingen kan verbeteren.
De algoritmen realtime testen
Om te zien hoe deze ideeën in de praktijk presteren, bouwden de onderzoekers een hardware-in-the-loop opstelling. Een realtime-simulator emuleerde een 4-kilowatt inductiemotor en zijn vermogenselektronica, terwijl de sensoloze regelalgoritmen op een aparte processorkern draaiden, net zoals in een echte industriële drive. Dit maakte snelle, herhaalbare experimenten met verschillende modelvarianten mogelijk. Ze vergeleken de traditionele waarnemer en regelaar met hun herschreven versies, en zetten Euler-, Taylor- en Runge–Kutta-discretiseringen tegen elkaar af. Ze evalueerden niet alleen hoe nauw koppel, snelheid en flux hun doelwaarden volgden, maar ook hoe snel het systeem stabiliseerde na snelheidsveranderingen, hoe groot de koppelrimpel was en hoeveel processortijd elke methode verbruikte.
Wat de resultaten betekenen voor echte machines
De tests toonden aan dat het eenvoudigweg verbeteren van de nauwkeurigheid van de waarnemer — zonder de basisstrategie van predictieve besturing te veranderen — al merkbaar betere sensoloze prestaties oplevert. Het herschreven kader, dat expliciete rotorfluxschatting vermijdt, kwam in stationair gedrag overeen met of overtrof het conventionele schema en bereikte de gewenste snelheid sneller, ondanks dat het met minder toestandsvariabelen werkte. Onder de discrete-tijdmethoden sprong de Taylor-gebaseerde aanpak eruit: deze leverde de kleinste snelheid- en fluxfouten en de snelste dynamische respons, tegen een matige toename in rekenkost en slechts een lichte toename van koppelrimpel. Hogere-orde Runge–Kutta-methoden, hoewel theoretisch verfijnder, boden weinig praktisch voordeel omdat ze in deze regelcontext niet volledig van toekomstige ingangsinformatie kunnen profiteren. Al met al suggereert de studie dat zorgvuldig ontworpen, hogere-nauwkeurigheids digitale modellen robuuste sensoloze inductiemotordrives zowel eenvoudiger als preciezer kunnen maken — een aantrekkelijke combinatie voor veeleisende industriële toepassingen.
Bronvermelding: Herrera-Hernández, R., Reusser, C., Carvajal, R. et al. Reformulated predictive torque and flux control with a full-order adaptive observer and accurate discrete-time models for sensorless induction machine drives. Sci Rep 16, 12757 (2026). https://doi.org/10.1038/s41598-026-41944-y
Trefwoorden: sensoloze motorbesturing, inductiemachinedrives, modelpredictieve besturing, adaptieve waarnemers, discrete-tijd modellering