Clear Sky Science · zh
簇状触觉纹理数据集:具有多速率与方向滑动接触的触觉纹理数据集
触觉数据为何与您数字生活相关
让手机有织物般的触感、让虚拟现实能感知木纹、让机器人分辨皮革与玻璃——这些都依赖于一件事:关于触觉的优质数据。尽管摄像头和麦克风拥有大量公开数据集供学习之用,我们的触觉却长期缺乏同等严谨采集的参照。本论文引入了一个新的数据集以填补这一空白,为科学家与工程师提供了一份关于当指尖以多种方式移动时不同表面触感的详尽库。
一座真实世界表面的库
研究团队构建了他们所称的簇状触觉纹理数据集,收录了来自118种日常材料的记录,涵盖木材、石材、玻璃、金属、塑料、织物、陶瓷、复合材料及多种皮革。研究者没有依赖志愿者以各自的方式探索表面,而是使用了由软橡胶制成的人工指尖。该指尖在严格可控的条件下被压入并滑过每种表面,从而使得所得数据可在材料与运动模式之间进行公平比较。
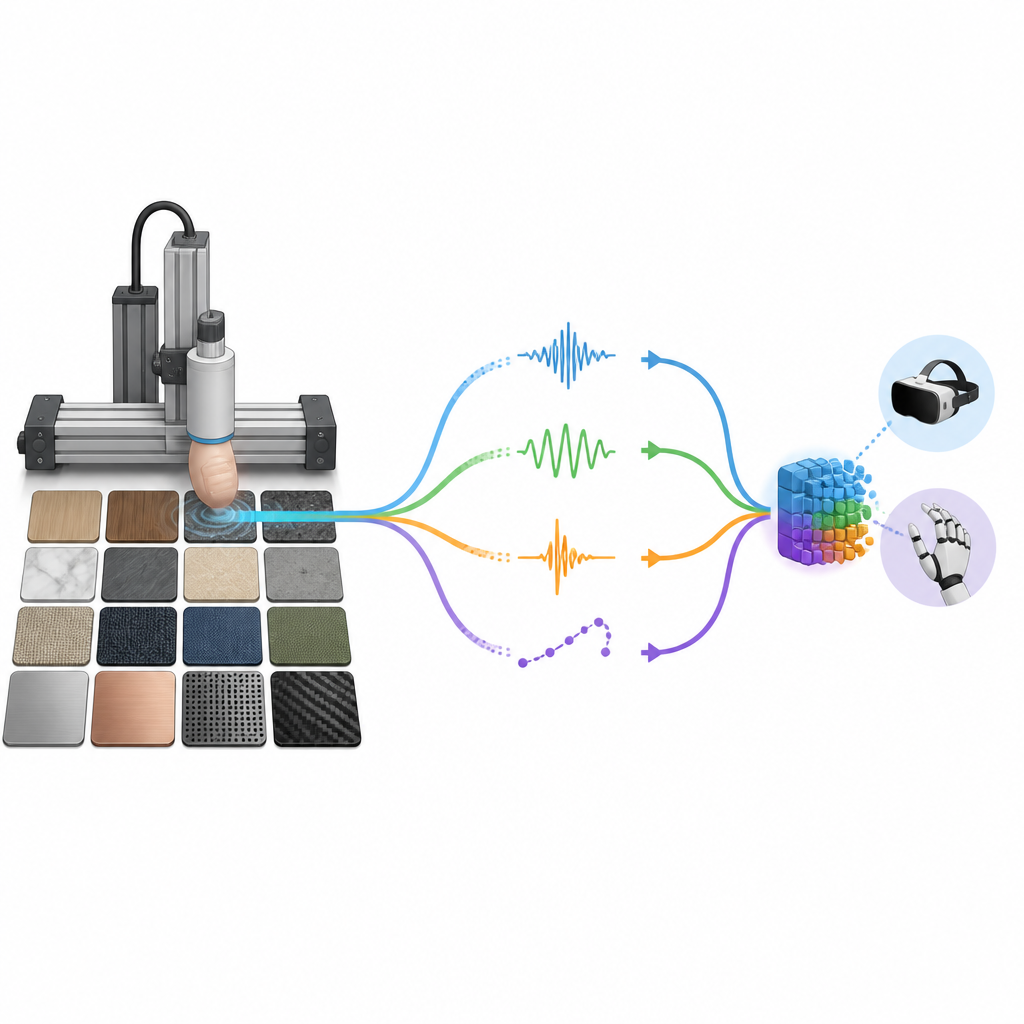
能听能感的机器人手指
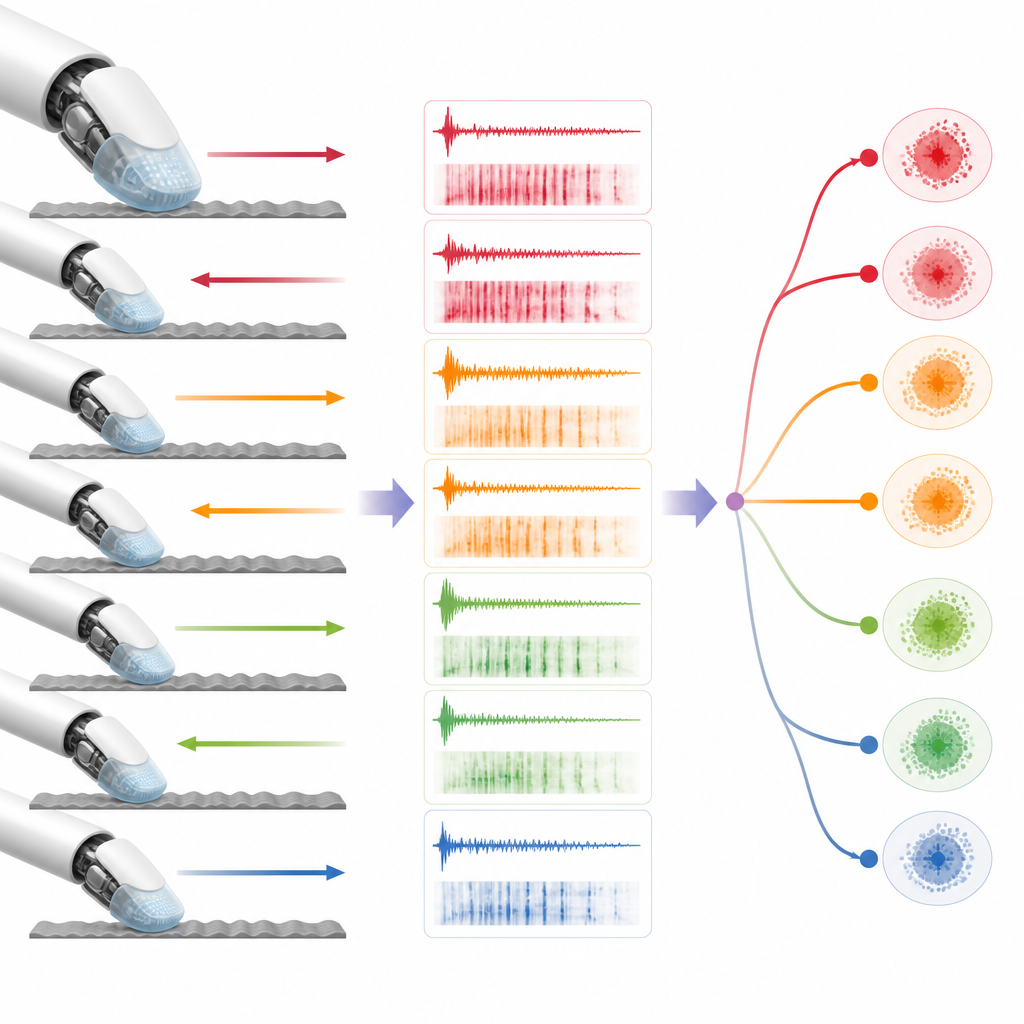
为了采集数据,研究者改装了一台三轴3D打印机,使其能以极高精度移动橡胶指尖。当指尖在各表面上滑动时,麦克风记录微弱声音,加速度计跟踪振动,力传感器测量接触力,机器同时记录指尖位置。测量在隔音箱内进行,团队在事后应用主动降噪以剔除机器运转产生的嗡嗡声。对于每种材料,他们测试了五种滑动速度、八个方向和两个力级,并对每一组合重复两次。由此每种表面生成160种运动条件,总计18,880条同步记录,以及高分辨率图像与摩擦测量数据。
从原始触觉到有用信号
采集数据只是第一步。作者还需证明这些数据包含计算机可学习的模式。他们将声音与振动记录转换为彩色时频图,并训练不同类型的算法来识别纹理、速度与方向。基于卷积神经网络的深度学习模型表现尤为出色,在同时使用声音与振动时,能约96%正确识别表面类型。他们还以约89%的准确率估计滑动速度,以约79%的准确率估计方向,表明这些记录保存了关于指尖运动方式的丰富信息。
速度与方向改变了什么
该数据集使团队得以探讨材料属性如何影响触觉传感器的读数。某些木材、金属与塑料等光滑、低摩擦样本随着速度变化产生规律性变化的传感信号,从而带来极高的速度识别率。相比之下,纱布与某些皮肤等柔软或不规则表面产生更混乱的信号,使速度估计更困难。就方向而言,具有明显纹理或条线图案的表面结果最清晰,因为跨纹理或沿纹理滑动会产生截然不同的振动与声音模式。毛糙或可变形表面则倾向于模糊这些差异。
对未来触觉技术的意义
对非专业读者来说,关键信息是:我们现在拥有一个公开且组织良好的触觉数据库,将物体外观与在多种移动方式下的声音与触感联系起来。该资源将有助于更容易地设计在你滑动或点击时能做出逼真反应的手机、控制器与虚拟现实系统,并训练能凭触觉判断材料的机器人。由于全球研究者均可下载该数据集与相关代码,他们可以公平比较方法并在彼此工作基础上构建,就像图像数据集推动计算机视觉发展那样。
引用: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
关键词: 触觉纹理数据集, 触觉传感, 虚拟现实触觉, 机器人触觉, 多模态机器学习