Clear Sky Science · ja
クラスタ触覚テクスチャデータセット:速度と方向を変えた滑り接触を含む触覚テクスチャデータセット
なぜ触覚データがあなたのデジタル生活に重要か
布のように感じるスマホ、木目を感じられるバーチャルリアリティ、革とガラスを見分けられるロボット――これらは全て共通してひとつの要素に依存しています:質の高い触覚データです。カメラやマイクには大量の公開データセットがありますが、触覚には同等の精緻に収集された参照データが不足してきました。本論文はその欠落を埋める新しいデータセットを紹介し、指先がさまざまな方法で移動したときに表面がどのように感じられるかを詳しく記録したライブラリを研究者や技術者に提供します。
現実世界の表面ライブラリ
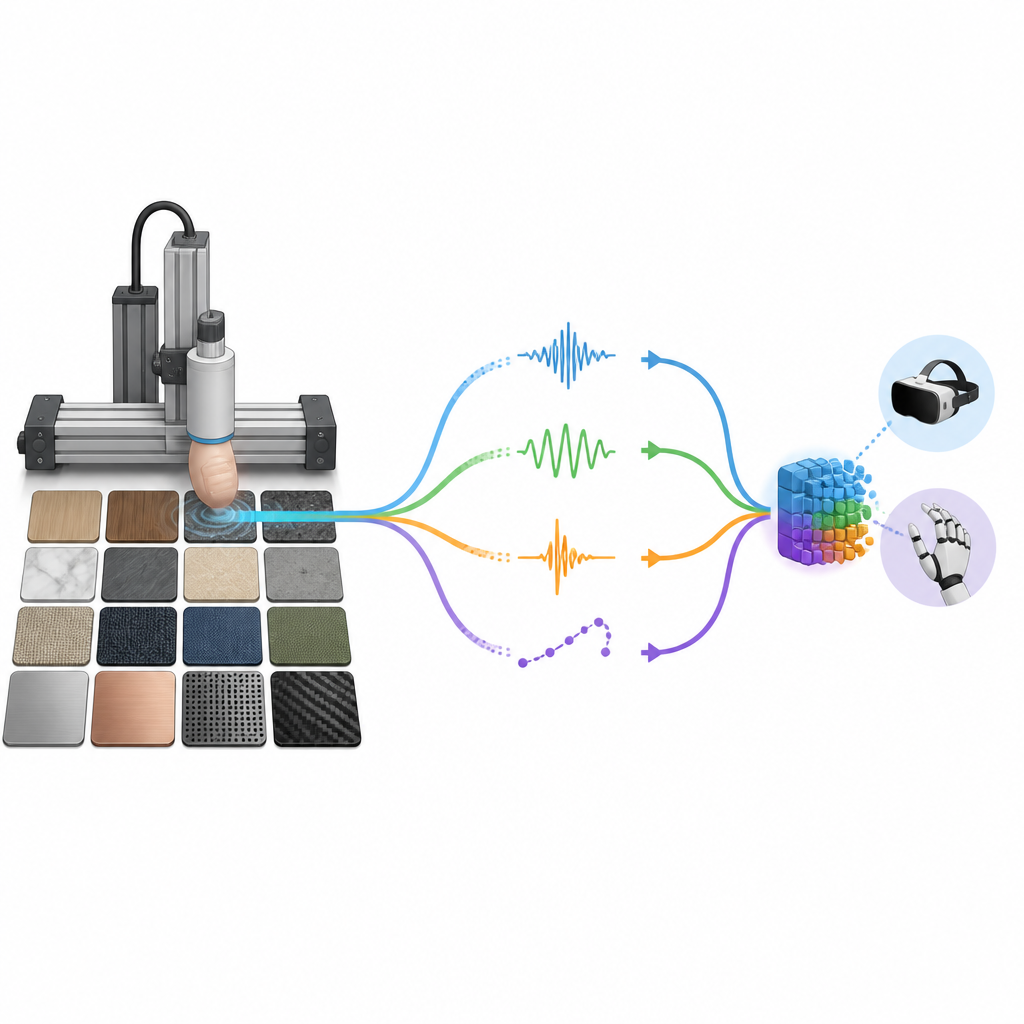
研究チームは「クラスタ触覚テクスチャデータセット」と名付けた、118種類の日常材料からの記録を収集しました。木材、石、ガラス、金属、プラスチック、布地、陶器、複合材料、各種レザーなどが含まれます。被験者が自分流に表面を触るのではなく、研究者は柔らかいゴム製の人工指先を使いました。この指先を一定条件で押し付け滑らせることで、材料や運動パターン間で公正に比較できるデータが得られるようにしています。
聴き、感じるロボット指
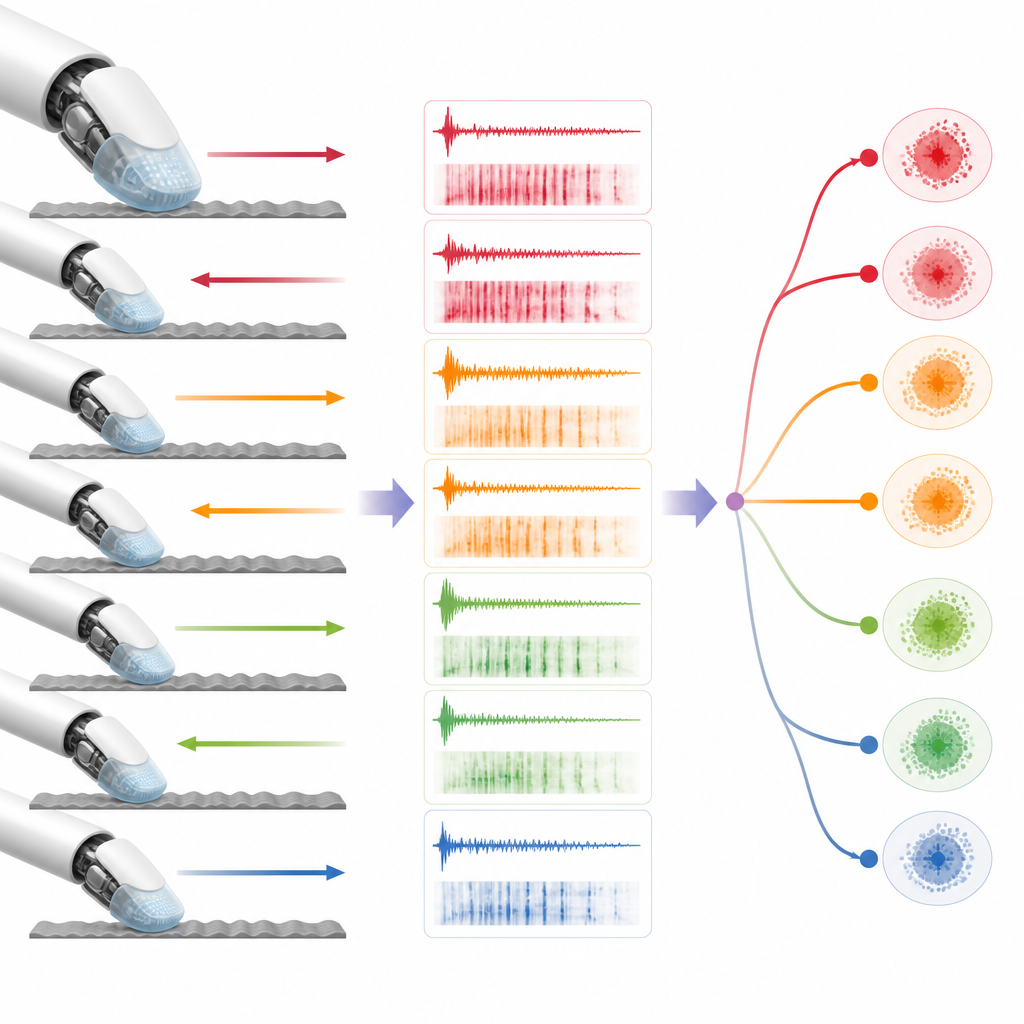
データ収集のため、研究者らは三軸の3Dプリンターを改造してゴム製指先を高精度に動かせるようにしました。指先が各表面を滑る間、マイクが微小な音を記録し、加速度計が振動を追跡し、ロードセルが接触力を測定し、機械が指先位置を記録しました。測定は防音ボックス内で行われ、後処理で機械の低周波ノイズを除去するアクティブノイズキャンセレーションを適用しました。各材料について5つの滑り速度、8つの方向、2段階の押し付け力をテストし、それぞれを2回繰り返しました。これにより表面ごとに160の運動条件、合計18,880の同期記録が得られ、高解像度画像や摩擦測定も付随しています。
生の触覚から有用な信号へ
データ収集は物語の一部にすぎません。著者らはそのデータが機械に学習可能なパターンを含むことを示す必要がありました。音と振動の記録を時間-周波数マップに変換し、複数のアルゴリズムでテクスチャ、速度、方向を認識するよう学習させました。畳み込みニューラルネットワークに基づく深層学習モデルが特に良好な性能を示し、音と振動の両方を与えられた場合、表面種別を約96%の正確さで識別しました。滑り速度は約89%、方向は約79%の精度で推定でき、記録が指先の動きに関する豊かな手がかりを保存していることが明らかになりました。
速度や方向で何が変わるか
このデータセットにより、材料特性が触覚センサーに何を伝えるかを問いかけることができました。特定の木材、金属、プラスチックなど滑らかで低摩擦の試料は、速度変化に伴って規則的に変化するセンサー信号を生み出し、速度認識が高精度になりました。これに対して、ガーゼや一部の皮膚のような柔らかく不規則な表面はより混沌とした信号を生み、速度推定を難しくしました。方向については、木目や線状パターンがはっきりした表面は、目に見える芯(グレイン)に対して横方向または沿った方向で滑ると振動や音が大きく異なるため、最も明瞭な結果をもたらしました。毛羽立ちや変形しやすい表面はこれらの差異をぼかしがちでした。
今後の触覚技術にとっての意味
専門外の人への要点は、見た目と、様々な動きでの音と感触を結び付けた公的でよく整理された触覚データライブラリが利用可能になったことです。この資源により、スワイプやタップに対してリアルに反応するスマホやコントローラー、VRシステムの設計が容易になり、触覚で材料を判別できるロボットの訓練も進むでしょう。世界中の研究者がデータセットと関連コードをダウンロードして手法を公正に比較し、画像データセットがコンピュータビジョンにもたらしたように互いの研究を発展させられるはずです。
引用: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
キーワード: 触覚テクスチャデータセット, 触覚センシング, バーチャルリアリティ触覚, ロボットの触覚, マルチモーダル機械学習