Clear Sky Science · ru
Набор данных тактильных текстур Cluster: набор данных тактильных текстур со скольжением под разными скоростями и направлениями
Почему данные о прикосновениях важны для вашей цифровой жизни
Телефоны, которые на ощупь похожи на ткань, виртуальная реальность, позволяющая чувствовать древесный рисунок, и роботы, которые отличают кожу от стекла — все это опирается на одно: качественные данные о прикосновениях. Пока камеры и микрофоны имеют большие общедоступные наборы данных для обучения, наше чувство осязания лишено аналогичной тщательно собранной эталонной базы. В этой статье представлен новый набор данных, заполняющий этот пробел и дающий учёным и инженерам подробную библиотеку того, как разные поверхности ощущаются при движении кончика пальца по ним многими способами.
Библиотека реальных поверхностей
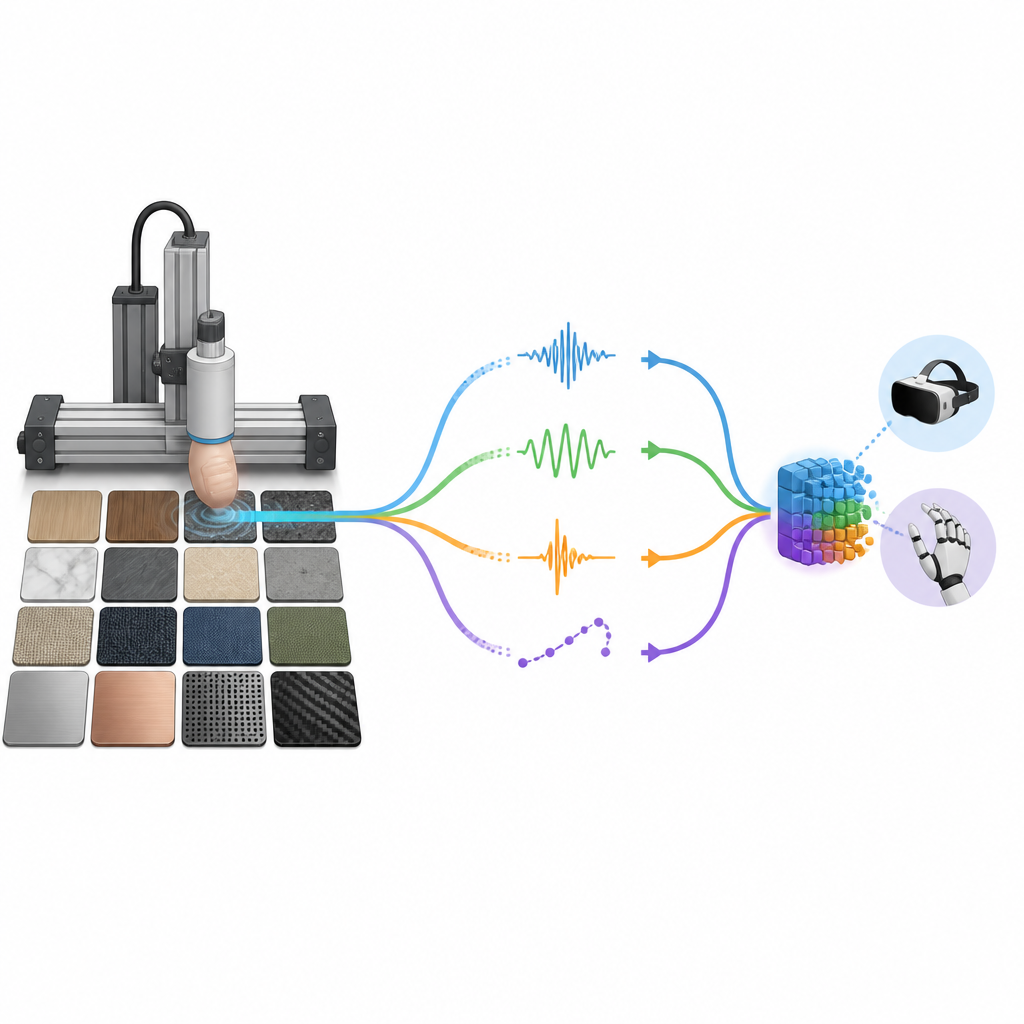
Команда создала то, что они называют Cluster Haptic Texture Dataset — коллекцию записей с 118 повседневных материалов. Сюда вошли древесина, камень, стекло, металл, пластики, ткани, керамика, композиты и различные виды кожи. Вместо того чтобы полагаться на добровольцев, изучающих поверхности собственным стилем, исследователи использовали искусственный кончик пальца из мягкой резины. Этот кончик прижимали и проводили по каждой поверхности в строго контролируемых условиях, чтобы полученные данные можно было справедливо сравнить между материалами и режимами движения.
Роботизированный палец, который слушает и чувствует
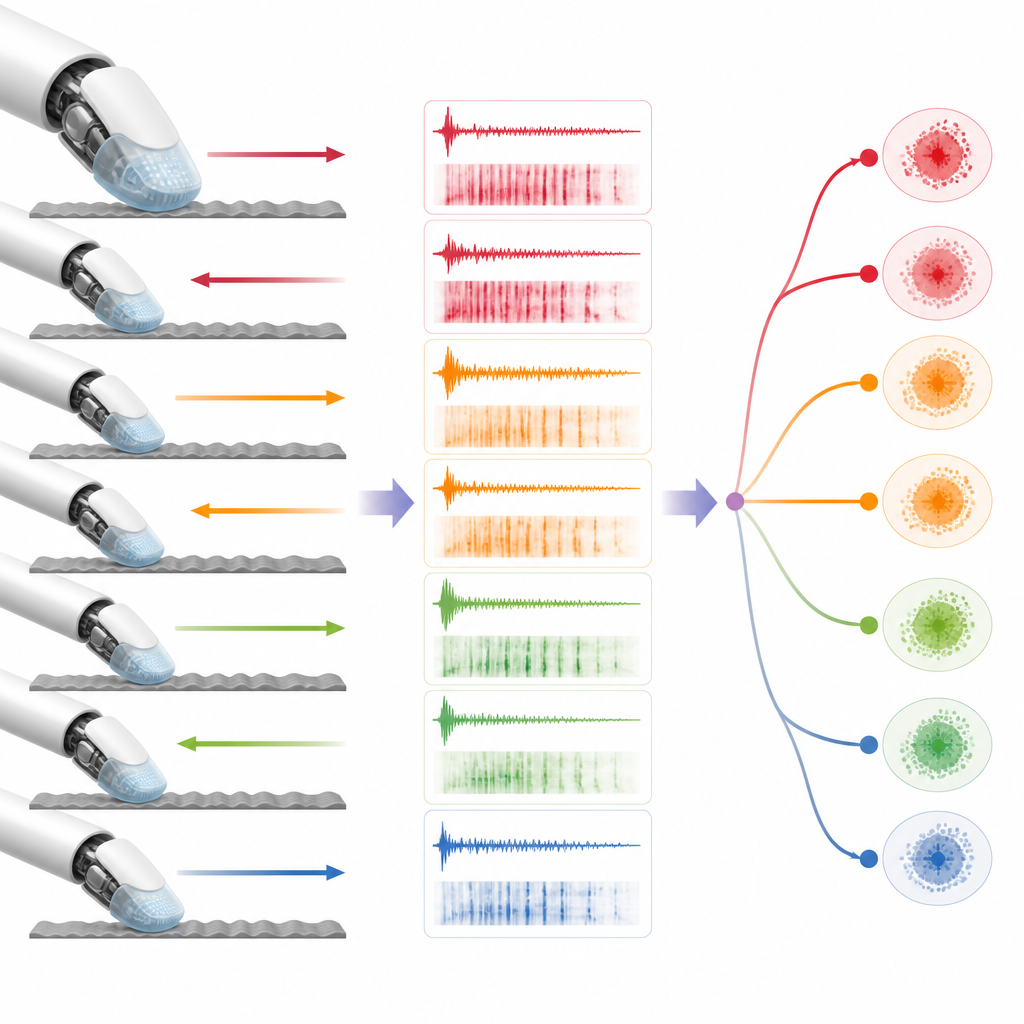
Для сбора данных исследователи модифицировали трёхосевой 3D-принтер, чтобы он мог с высокой точностью перемещать резиновый кончик. Пока кончик скользил по каждой поверхности, микрофоны записывали тонкие звуки, акселерометр отслеживал вибрации, тензометрический датчик измерял силу контакта, а машина логировала положение кончика. Измерения проводили внутри звукоизолированного ящика, а затем применяли активное подавление шума, чтобы убрать гул механизма. Для каждого материала они протестировали пять скоростей скольжения, восемь направлений и два уровня силы, повторяя каждый случай дважды. Это дало 160 условий движения на поверхность и в сумме 18 880 синхронизированных записей, а также снимки высокого разрешения и измерения трения.
От сырых данных прикосновения к полезным сигналам
Сбор данных — лишь часть работы. Авторам также нужно было показать, что в них содержатся шаблоны, которые компьютеры могут изучать. Они преобразовали звук и вибрации в красочные временно-частотные карты и обучили разные типы алгоритмов распознавать текстуры, скорости и направления. Модели глубокого обучения на основе сверточных нейронных сетей показали особенно хорошие результаты, правильно определяя тип поверхности примерно в 96 процентах случаев при наличии как звука, так и вибрации. Они также оценивали скорость скольжения с точностью около 89 процентов и направление с точностью около 79 процентов, что показывает — записи сохраняют богатые подсказки о том, как двигался кончик пальца.
Что меняется с изменением скорости и направления
Набор данных позволил команде исследовать, как свойства материала влияют на то, что улавливают сенсоры прикосновения. Гладкие, мало трение образцы, такие как некоторые породы древесины, металлы и пластики, давали сигналы сенсоров, которые менялись закономерно при изменении скорости, что приводило к высокой точности распознавания скорости. Напротив, мягкие или нерегулярные поверхности, такие как марля и некоторые виды кожи, создавали более хаотичные сигналы, что затрудняло оценку скорости. По направлению самые четкие результаты давали поверхности с выраженным рисунком или волокнами, потому что скольжение поперёк или вдоль рисунка давало очень разные вибрационные и звуковые паттерны. Материалы с пушистой или деформируемой поверхностью обычно размывали эти различия.
Что это значит для будущих тактильных технологий
Для неспециалистов главный вывод в том, что теперь существует публичная, хорошо организованная библиотека данных о прикосновениях, связывающая внешний вид с тем, как материалы звучат и ощущаются при разных типах движения. Этот ресурс должен упростить разработку телефонов, контроллеров и систем виртуальной реальности, которые реально реагируют при свайпе или касании, а также обучение роботов, способных оценивать материалы на ощупь. Поскольку исследователи по всему миру могут скачать набор данных и связанный код, они смогут честно сравнивать методы и развивать идеи друг друга, так же как наборы изображений продвинули компьютерное зрение.
Цитирование: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
Ключевые слова: набор данных тактильных текстур, тактильное восприятие, гиротехника для виртуальной реальности, осязание робота, мультимодальное машинное обучение