Clear Sky Science · pt
Conjunto de Dados Táteis Cluster: Conjunto de Texturas Hápticas com Contatos de Deslizamento em Velocidades e Direções Variadas
Por que os dados de toque importam para sua vida digital
Celulares que parecem tecido, realidade virtual que permite perceber o veio da madeira e robôs que distinguem couro de vidro dependem todos de uma coisa: bons dados sobre o toque. Enquanto câmeras e microfones contam com grandes conjuntos de dados públicos para aprendizado, nosso sentido do tato carecia desse tipo de referência coletada com rigor. Este artigo apresenta um novo conjunto de dados que preenche essa lacuna, oferecendo a cientistas e engenheiros uma biblioteca detalhada de como diferentes superfícies se sentem quando uma ponta de dedo se move sobre elas de várias maneiras.
Uma biblioteca de superfícies do mundo real
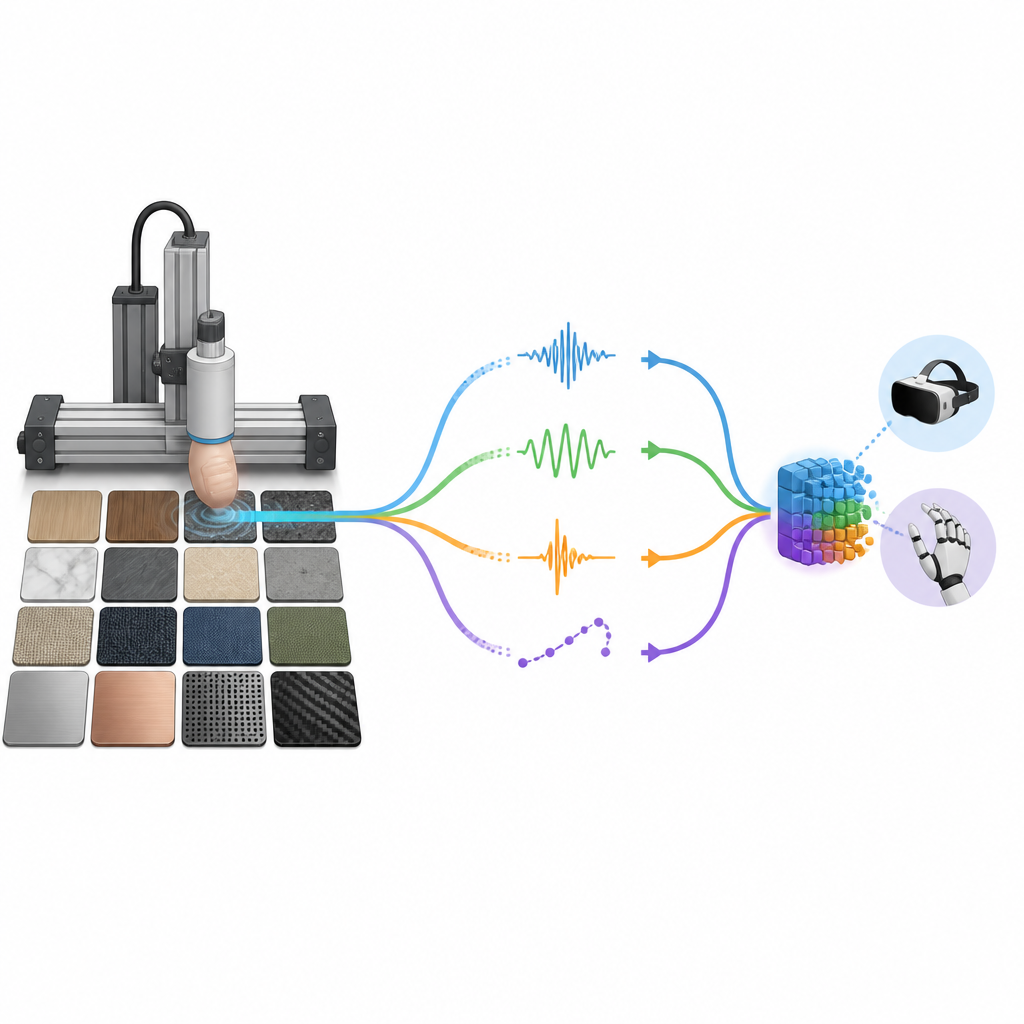
A equipe criou o que chamam de Cluster Haptic Texture Dataset, uma coleção de gravações de 118 materiais do dia a dia. Isso inclui madeira, pedra, vidro, metal, plásticos, tecidos, cerâmicas, compósitos e vários couros. Em vez de depender de voluntários humanos para explorar superfícies à sua maneira, os pesquisadores usaram uma ponta de dedo artificial feita de borracha macia. Essa ponta foi pressionada e deslizada sobre cada superfície sob condições rigorosamente controladas para que os dados obtidos pudessem ser comparados de forma justa entre materiais e padrões de movimento.
Um dedo robótico que escuta e sente
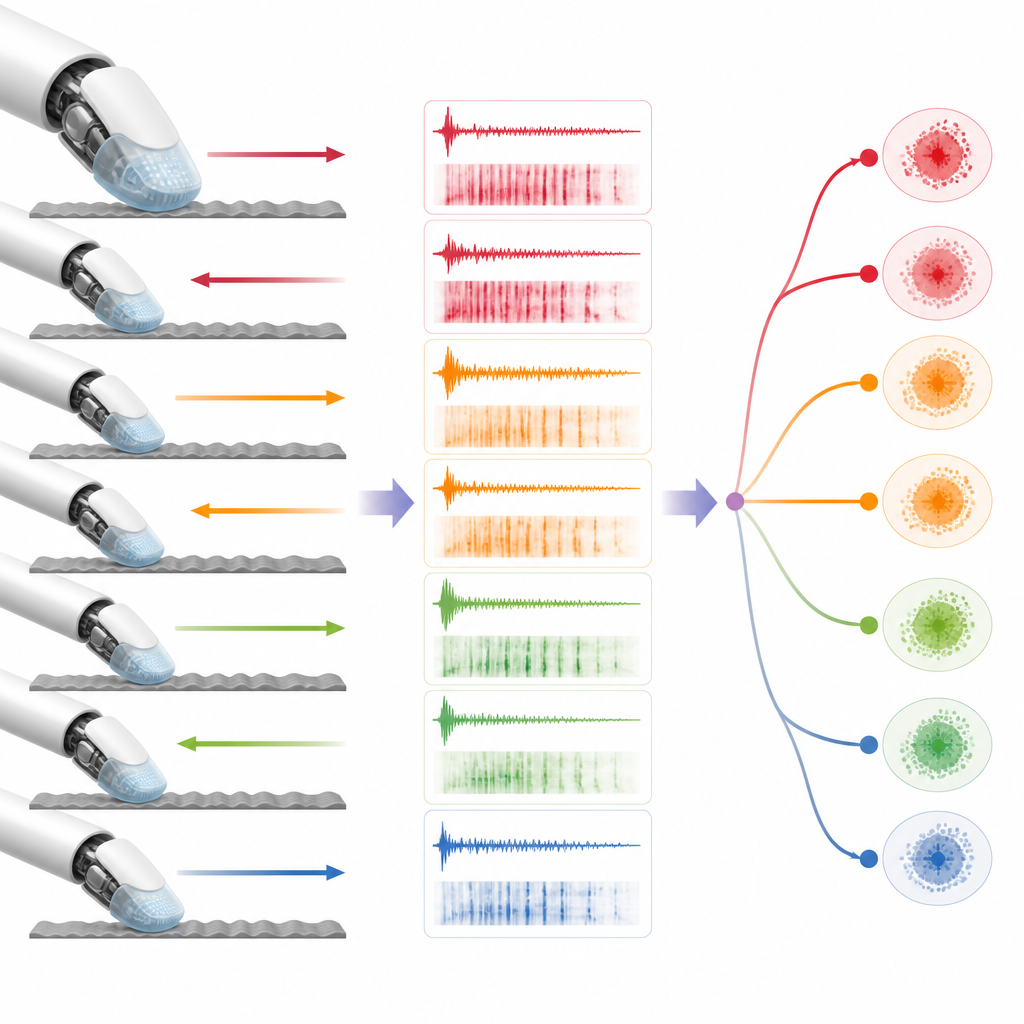
Para coletar os dados, os pesquisadores modificaram uma impressora 3D de três eixos para que pudesse mover a ponta de borracha com grande precisão. Enquanto a ponta deslizava sobre cada superfície, microfones registravam os sons mínimos, um acelerômetro acompanhava as vibrações, uma célula de carga mediu a força de contato e a máquina registrou a posição da ponta. As medições foram feitas dentro de uma caixa à prova de som, e a equipe aplicou cancelamento ativo de ruído posteriormente para remover o zumbido da máquina. Para cada material eles testaram cinco velocidades de deslizamento, oito direções e dois níveis de força, repetindo cada caso duas vezes. Isso produziu 160 condições de movimento por superfície e um total de 18.880 gravações sincronizadas, além de imagens em alta resolução e medidas de atrito.
Do toque bruto aos sinais úteis
Coletar os dados é apenas parte da história. Os autores também precisaram mostrar que eles contêm padrões que computadores podem aprender. Converteram as gravações de som e vibração em mapas tempo–frequência coloridos e treinaram diferentes tipos de algoritmos para reconhecer texturas, velocidades e direções. Modelos de deep learning baseados em redes neurais convolucionais tiveram desempenho especialmente bom, identificando corretamente o tipo de superfície em cerca de 96% das vezes quando receberam som e vibração. Também estimaram a velocidade de deslizamento com aproximadamente 89% de acurácia e a direção com cerca de 79% de acurácia, revelando que as gravações preservam pistas ricas sobre como a ponta estava se movendo.
O que muda com velocidade e direção
O conjunto de dados permitiu à equipe investigar como propriedades dos materiais influenciam o que os sensores de toque captam. Amostras lisas e de baixo atrito, como certas madeiras, metais e plásticos, produziram sinais de sensor que variavam de maneira mais regular conforme a velocidade mudava, levando a reconhecimento de velocidade altamente preciso. Em contraste, superfícies macias ou irregulares, como gazes e algumas peles, criaram sinais mais caóticos, o que tornou a velocidade mais difícil de estimar. Para a direção, superfícies com grão forte ou padrões alinhados deram os resultados mais claros, porque deslizar através ou ao longo do grão produziu padrões de vibração e som muito diferentes. Materiais com superfícies felpudas ou deformáveis tendiam a borrar essas diferenças.
O que isso significa para a tecnologia tátil futura
Para não especialistas, a mensagem principal é que agora temos uma biblioteca pública e bem organizada de dados táteis que relaciona como algo parece com como soa e se sente sob variadas maneiras de movimentação. Esse recurso deve facilitar o design de celulares, controles e sistemas de realidade virtual que respondem de forma realista quando você desliza ou toca, e treinar robôs que possam julgar materiais pelo toque. Como pesquisadores ao redor do mundo podem baixar o conjunto de dados e o código relacionado, eles poderão comparar métodos de forma justa e construir sobre o trabalho uns dos outros, da mesma forma que conjuntos de imagens fizeram pela visão computacional.
Citação: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
Palavras-chave: conjunto de dados de textura háptica, sensoriamento tátil, háptica em realidade virtual, toque robótico, aprendizado de máquina multimodal