Clear Sky Science · es
Conjunto de datos hápticos Cluster: Conjunto de texturas hápticas con contactos deslizantes de velocidad y dirección variadas
Por qué los datos táctiles importan en tu vida digital
Teléfonos que se sienten como tela, realidad virtual que te permite percibir la veta de la madera y robots que distinguen cuero de vidrio dependen de algo: buenos datos sobre el tacto. Mientras que cámaras y micrófonos cuentan con grandes conjuntos de datos públicos, nuestro sentido del tacto ha carecido de referencias recogidas con el mismo rigor. Este artículo presenta un nuevo conjunto de datos que cubre esa laguna, ofreciendo a científicos e ingenieros una biblioteca detallada de cómo se sienten distintas superficies cuando una yema de dedo se mueve sobre ellas de muchas maneras.
Una biblioteca de superficies del mundo real
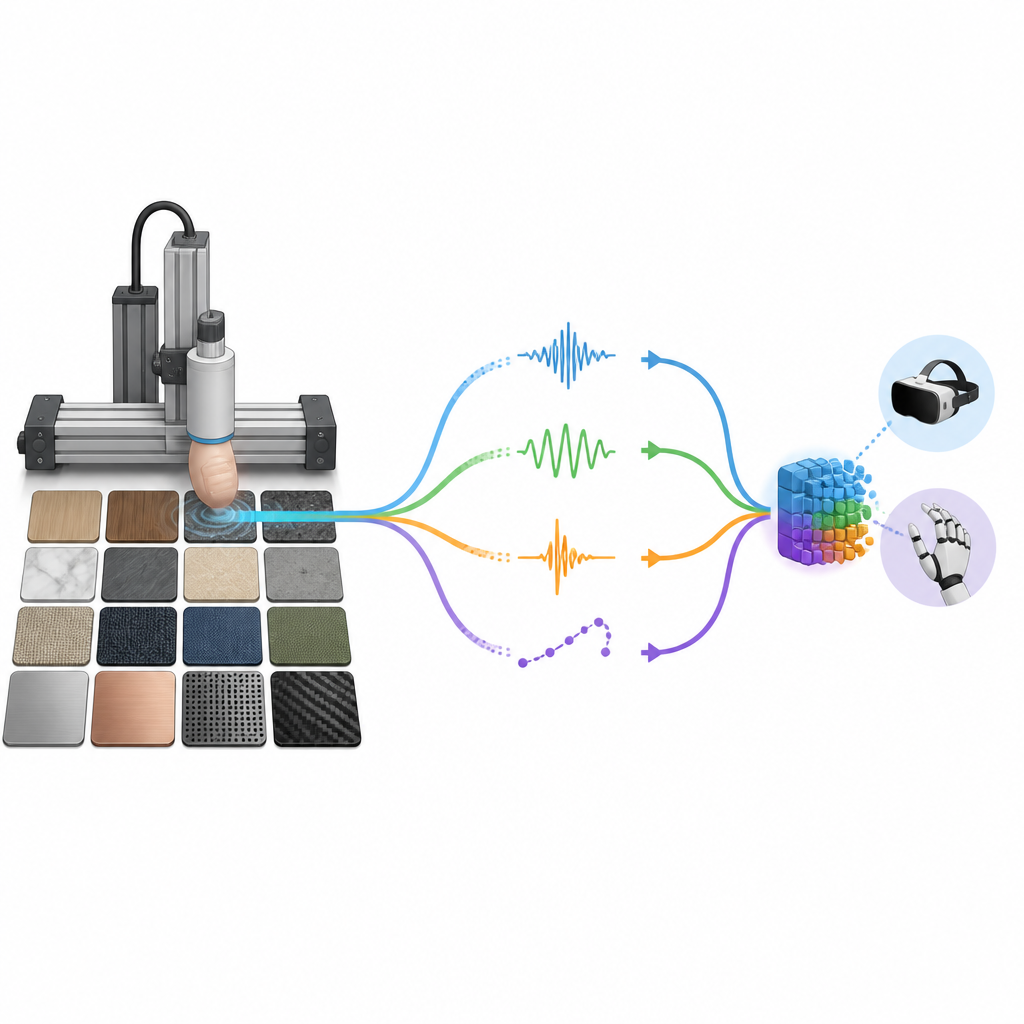
El equipo construyó lo que llaman el Conjunto de Datos de Texturas Hápticas Cluster, una colección de grabaciones de 118 materiales cotidianos. Estos incluyen madera, piedra, vidrio, metal, plásticos, tejidos, cerámica, compuestos y varios tipos de cuero. En lugar de depender de voluntarios humanos que exploren las superficies a su manera, los investigadores usaron una yema artificial de goma blanda. Esta yema se presionó y deslizó sobre cada superficie bajo condiciones estrictamente controladas para que los datos resultantes pudieran compararse de forma coherente entre materiales y patrones de movimiento.
Un dedo robótico que escucha y siente
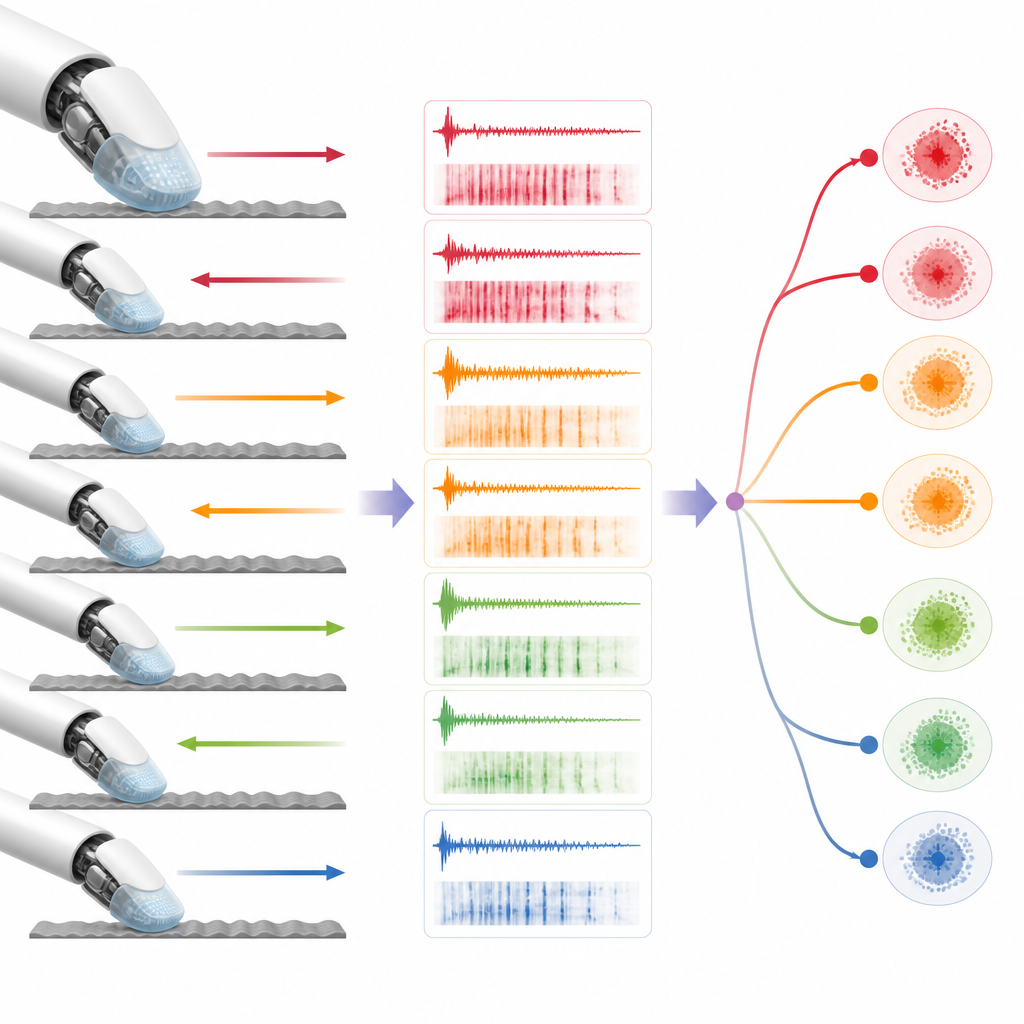
Para recopilar los datos, los investigadores modificaron una impresora 3D de tres ejes para que pudiera mover la yema de goma con gran precisión. Mientras la punta se deslizaba sobre cada superficie, micrófonos registraban los pequeños sonidos, un acelerómetro seguía las vibraciones, una celda de carga medía la fuerza de contacto y la máquina registraba la posición de la yema. Las mediciones se tomaron dentro de una cámara anecoica y el equipo aplicó cancelación activa de ruido después para eliminar el zumbido de la máquina. Para cada material probaron cinco velocidades de deslizamiento, ocho direcciones y dos niveles de fuerza, repitiendo cada caso dos veces. Esto produjo 160 condiciones de movimiento por superficie y un total de 18.880 grabaciones sincronizadas, junto con imágenes de alta resolución y mediciones de fricción.
Del tacto bruto a señales útiles
Recopilar los datos es solo parte de la historia. Los autores también tuvieron que demostrar que contienen patrones que las computadoras pueden aprender. Convirtieron las grabaciones de sonido y vibración en mapas tiempo‑frecuencia coloridos y entrenaron distintos tipos de algoritmos para reconocer texturas, velocidades y direcciones. Modelos de aprendizaje profundo basados en redes neuronales convolucionales obtuvieron un rendimiento especialmente bueno, identificando correctamente el tipo de superficie en alrededor del 96 por ciento de los casos cuando se les proporcionó tanto sonido como vibración. También estimaron la velocidad de deslizamiento con aproximadamente un 89 por ciento de precisión y la dirección con cerca de un 79 por ciento, lo que revela que las grabaciones conservan pistas ricas sobre cómo se movía la yema.
Qué cambia con la velocidad y la dirección
El conjunto de datos permitió al equipo preguntar cómo las propiedades del material influyen en lo que captan los sensores táctiles. Muestras lisas y de baja fricción, como ciertas maderas, metales y plásticos, produjeron señales de sensor que variaban de forma regular al cambiar la velocidad, lo que condujo a un reconocimiento de velocidad muy preciso. En contraste, superficies blandas o irregulares como gasas y algunas pieles generaron señales más caóticas, lo que dificultó la estimación de la velocidad. En cuanto a la dirección, las superficies con vetas marcadas o patrones lineales dieron los resultados más claros, porque deslizarse cruzando o siguiendo la veta producía patrones de vibración y sonido muy diferentes. Los materiales con superficies difusas o deformables tendían a difuminar esas diferencias.
Qué supone esto para la futura tecnología táctil
Para el público en general, el mensaje clave es que ahora disponemos de una biblioteca pública y bien organizada de datos táctiles que vincula cómo se ve algo con cómo suena y se siente bajo muchas formas de movimiento. Este recurso debería facilitar el diseño de teléfonos, mandos y sistemas de realidad virtual que respondan de manera realista cuando deslizas o tocas, y el entrenamiento de robots capaces de juzgar materiales por el tacto. Como los investigadores de todo el mundo pueden descargar el conjunto de datos y el código relacionado, pueden comparar métodos de forma justa y construir sobre el trabajo de otros, de forma análoga a lo que han hecho los conjuntos de imágenes para la visión por computador.
Cita: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
Palabras clave: conjunto de datos de texturas hápticas, sensado táctil, háptica en realidad virtual, tacto robótico, aprendizaje automático multimodal