Clear Sky Science · sv
Cluster Haptic Texture Dataset: Haptiskt texturdatapaket med varierande hastighets- och riktningsberoende glidkontakter
Varför beröringsdata spelar roll i ditt digitala liv
Telefoner som känns som tyg, virtuell verklighet som låter dig uppfatta träådring, och robotar som kan skilja läder från glas — allt detta bygger på en sak: bra data om beröring. Medan kameror och mikrofoner har stora öppna dataset att lära av, har vår känsla för beröring saknat samma noggrant insamlade referenser. Denna artikel introducerar ett nytt dataset som fyller det tomrummet och ger forskare och ingenjörer ett detaljerat bibliotek över hur olika ytor upplevs när en fingertopp rör sig över dem på många olika sätt.
Ett bibliotek av verkliga ytor
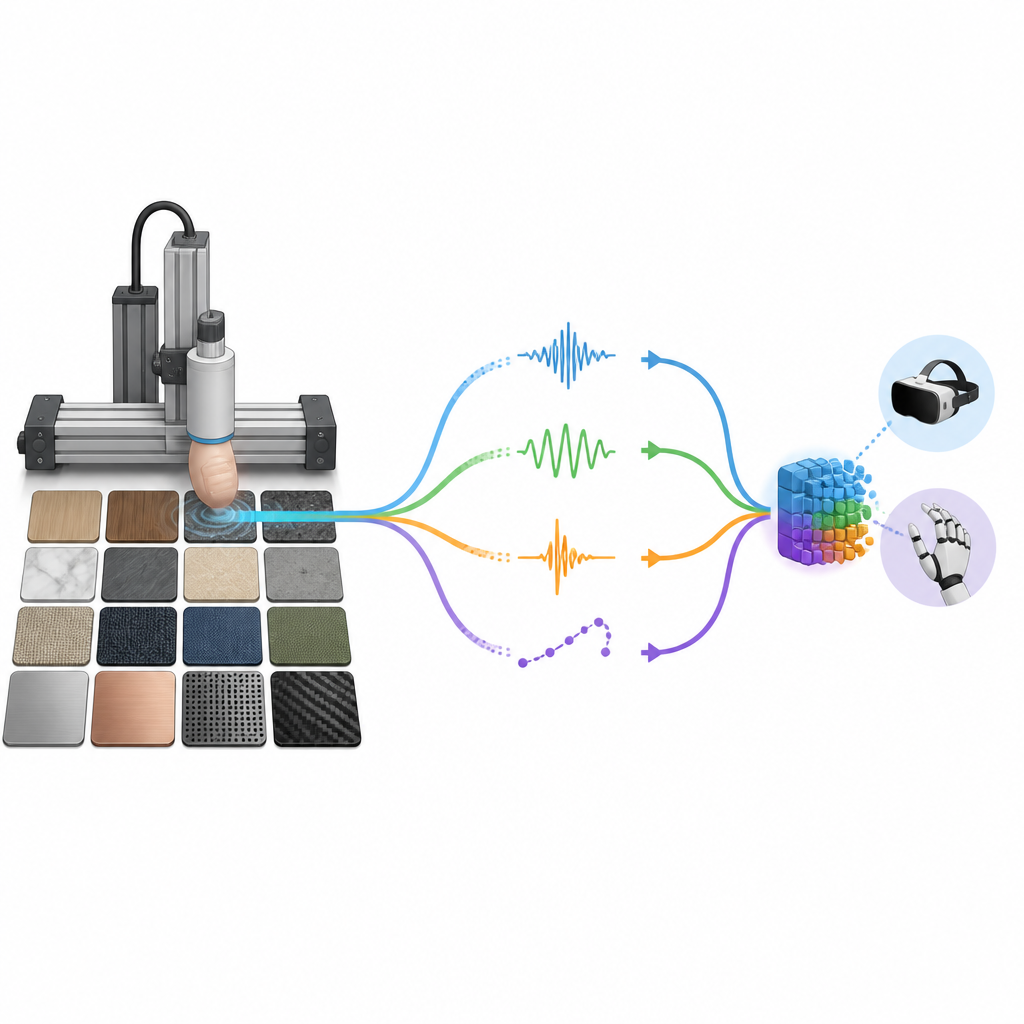
Forskargruppen byggde det de kallar Cluster Haptic Texture Dataset, en samling inspelningar från 118 vardagliga material. Dessa inkluderar trä, sten, glas, metall, plaster, tyger, keramik, kompositer och olika läder. Istället för att förlita sig på frivilliga människor som utforskar ytor på sitt eget sätt, använde forskarna en konstgjord fingertopp av mjukt gummi. Fingertoppen pressades och gled över varje yta under noggrant kontrollerade förhållanden så att de resulterande data kunde jämföras rättvist över material och rörelsemönster.
En robotfinger som lyssnar och känner
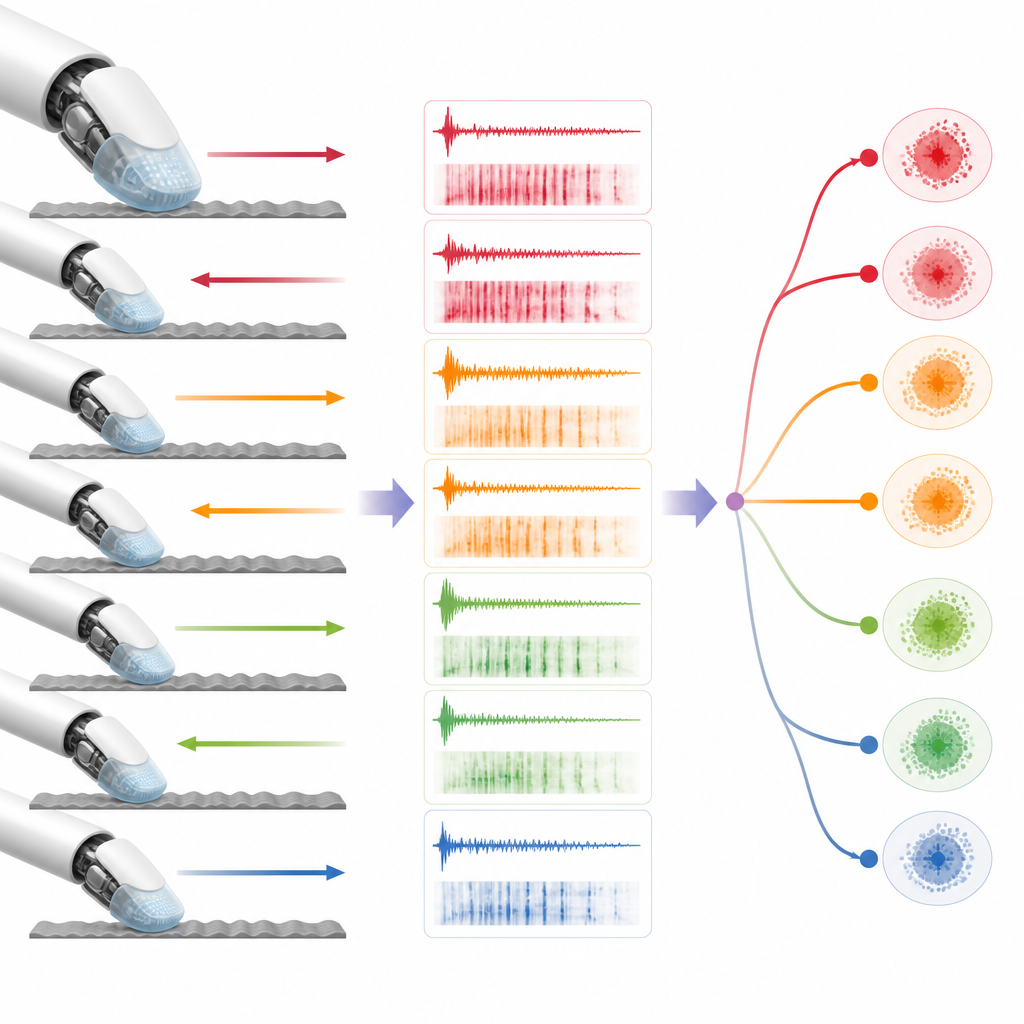
För att samla in data modifierade forskarna en treaxlig 3D-skrivare så att den kunde röra den gummibeklädda fingertoppen med hög precision. När spetsen gled över varje yta spelade mikrofoner in de små ljuden, en accelerometer följde vibrationer, en kraftsensor mätte kontaktkraften och maskinen loggade fingertoppens position. Mätningarna gjordes inuti en ljudisolerad låda, och teamet applicerade aktiv brusreducering i efterhand för att ta bort maskinens surr. För varje material testade de fem glidhastigheter, åtta riktningar och två kraftnivåer, och upprepade varje fall två gånger. Detta gav 160 rörelseförhållanden per yta och totalt 18 880 synkroniserade inspelningar, tillsammans med högupplösta bilder och friktionsmätningar.
Från rå beröring till användbara signaler
Att samla in data är bara en del av historien. Författarna behövde också visa att datasetet innehåller mönster som datorer kan lära sig från. De konverterade ljud- och vibrationsinspelningarna till färgrika tid–frekvenskartor och tränade olika typer av algoritmer för att känna igen texturer, hastigheter och riktningar. Djupa inlärningsmodeller baserade på konvolutionella neurala nätverk presterade särskilt bra, och identifierade korrekt yttyp ungefär 96 procent av gångerna när både ljud och vibrationer gavs. De uppskattade även glidhastighet med cirka 89 procents noggrannhet och riktning med cirka 79 procents noggrannhet, vilket visar att inspelningarna bevarar rika ledtrådar om hur fingertoppen rörde sig.
Vad som förändras med hastighet och riktning
Datasetet gav teamet möjlighet att undersöka hur materialegenskaper påverkar vad taktila sensorer fångar upp. Släta, lågfriktionsprover såsom vissa träslag, metaller och plaster producerade sensorsignaler som varierade på regelbundna sätt när hastigheten förändrades, vilket ledde till mycket exakt hastighetsigenkänning. Däremot skapade mjuka eller oregelbundna ytor som gasväv och vissa skinn mer kaotiska signaler, vilket gjorde hastigheten svårare att uppskatta. För riktning gav ytor med tydlig ådring eller ränder de klaraste resultaten, eftersom glidning tvärs över eller i riktning med ådringen skapade mycket olika vibrations- och ljudmönster. Material med ludna eller deformbara ytor tenderade att sudda ut dessa skillnader.
Vad detta betyder för framtidens beröringsteknik
För icke-experter är huvudbudskapet att vi nu har ett offentligt, välorganiserat bibliotek med beröringsdata som kopplar hur något ser ut till hur det låter och känns under många olika rörelser. Denna resurs bör göra det lättare att designa telefoner, spakar och system för virtuell verklighet som reagerar realistiskt när du sveper eller trycker, och att träna robotar som kan bedöma material genom beröring. Eftersom forskare runt om i världen kan ladda ner datasetet och tillhörande kod, kan de jämföra metoder rättvist och bygga vidare på varandras arbete, på samma sätt som bilddataset har gjort för datorseende.
Citering: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
Nyckelord: haptiskt texturdatapaket, taktil sensing, haptik för virtuell verklighet, robotberöring, multimodal maskininlärning