Clear Sky Science · nl
Cluster Haptic Texture Dataset: Haptische textuurdataset met gevarieerde schuifsnelheid- en richtingcontacten
Waarom raakdata van belang zijn voor uw digitale leven
Telefoons die als stof aanvoelen, virtual reality waarmee u houtnerf kunt waarnemen, en robots die leer van glas kunnen onderscheiden — ze vertrouwen allemaal op één ding: goed onderzoeksmateriaal over aanraking. Waar camera’s en microfoons uitgebreide publieke datasets hebben om van te leren, ontbrak het onze tastzin aan vergelijkbare, zorgvuldig verzamelde referenties. Dit artikel introduceert een nieuwe dataset die die kloof opvult en wetenschappers en ingenieurs een gedetailleerde bibliotheek biedt van hoe verschillende oppervlakken aanvoelen wanneer een vingertop er op allerlei manieren overheen beweegt.
Een bibliotheek van alledaagse oppervlakken
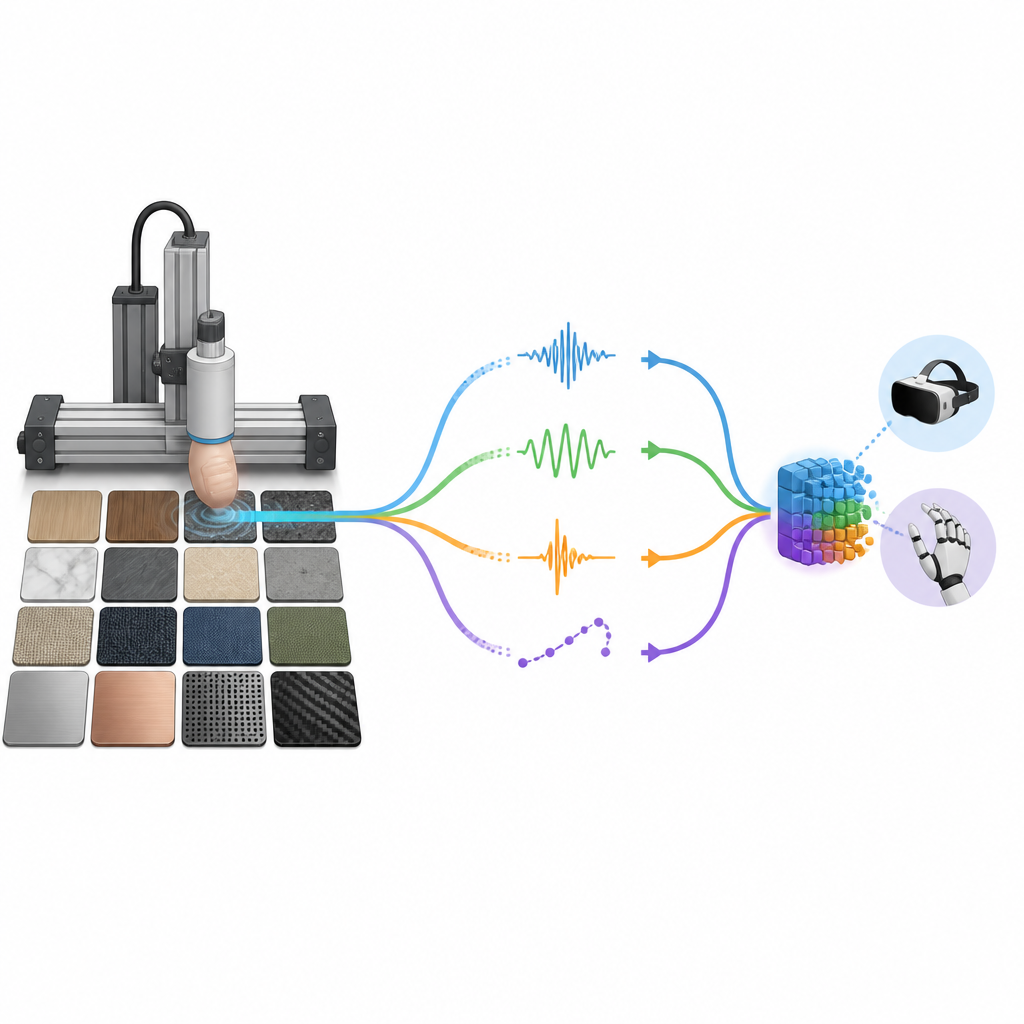
Het team bouwde wat zij de Cluster Haptic Texture Dataset noemen, een verzameling opnames van 118 alledaagse materialen. Daaronder bevinden zich hout, steen, glas, metaal, kunststoffen, stoffen, keramiek, composieten en diverse soorten leer. In plaats van te vertrouwen op menselijke proefpersonen die oppervlakken op hun eigen manier verkennen, gebruikten de onderzoekers een kunstmatige vingertop van zacht rubber. Deze vingertop werd onder strik gecontroleerde condities op elk oppervlak gedrukt en eroverheen geschoven, zodat de resulterende gegevens eerlijk konden worden vergeleken tussen materialen en bewegingspatronen.
Een robotvinger die luistert en voelt
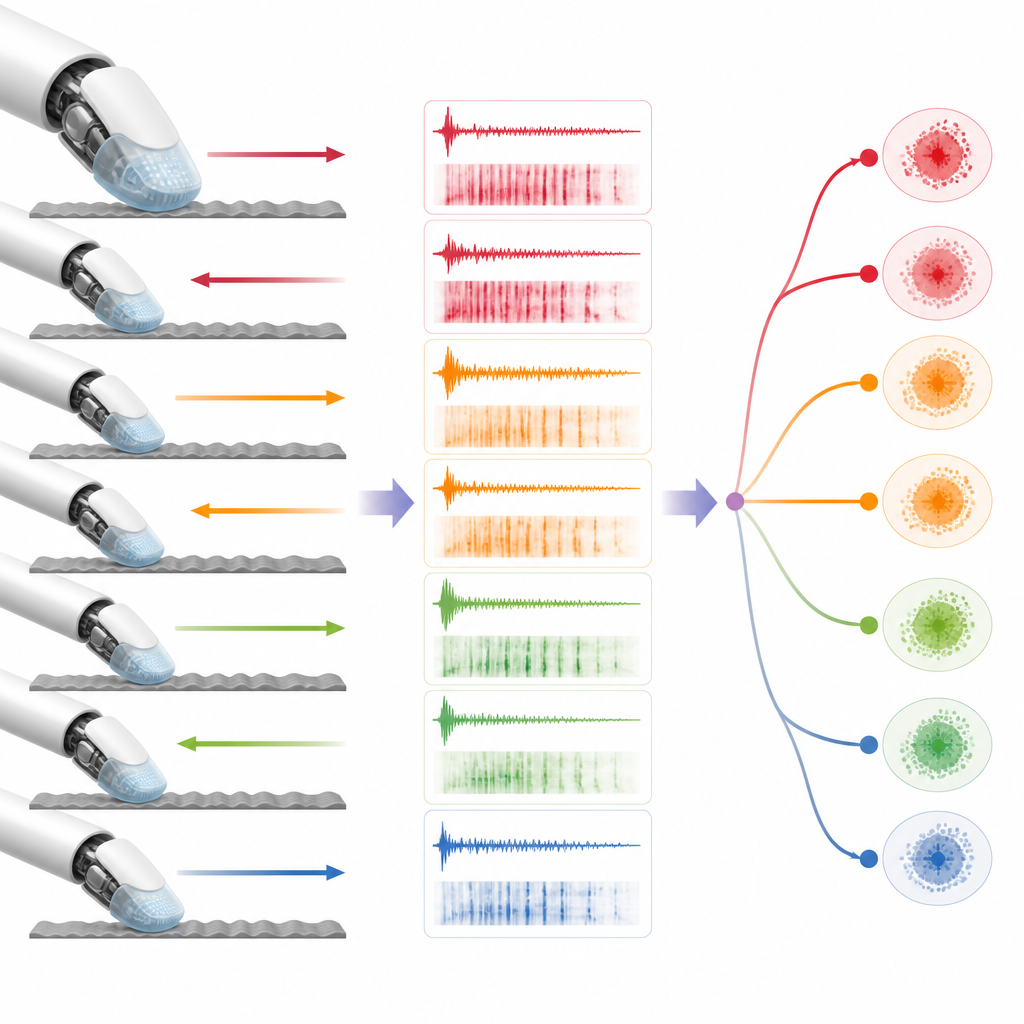
Om de data te verzamelen pasten de onderzoekers een driedimensionale printer met drie assen aan zodat hij de rubberen vingertop met grote precisie kon bewegen. Terwijl de tip over elk oppervlak schoof, namen microfoons de subtiele geluiden op, registreerde een versnellingsmeter de trillingen, mat een loadcell de contactkracht en logde de machine de positie van de vingertop. Metingen vonden plaats in een geluidsdichte doos en het team paste achteraf actieve ruisonderdrukking toe om het gezoem van de machine weg te halen. Voor elk materiaal testten ze vijf schuifsnelheden, acht richtingen en twee krachtniveaus, waarbij elk geval twee keer werd herhaald. Dit resulteerde in 160 bewegingscondities per oppervlak en in totaal 18.880 gesynchroniseerde opnames, samen met hoge-resolutiebeelden en wrijvingsmetingen.
Van ruwe aanraking naar bruikbare signalen
Het verzamelen van de data is slechts een deel van het verhaal. De auteurs moesten ook aantonen dat de dataset patronen bevat waar computers van kunnen leren. Ze zetten de geluid- en trillingsopnames om in kleurrijke tijd-frequentiekaarten en trainden verschillende soorten algoritmen om texturen, snelheden en richtingen te herkennen. Deep-learningmodellen gebaseerd op convolutionele neurale netwerken presteerden bijzonder goed: ze identificeerden het oppervlaktype correct in ongeveer 96 procent van de gevallen wanneer zowel geluid als trilling beschikbaar waren. Ze schatten ook de schuifsnelheid met ongeveer 89 procent nauwkeurigheid en de richting met ongeveer 79 procent nauwkeurigheid, wat aangeeft dat de opnames rijke aanwijzingen bewaren over hoe de vingertop bewoog.
Wat verandert met snelheid en richting
De dataset maakte het het team mogelijk om te onderzoeken hoe materiaaleigenschappen beïnvloeden wat onze sensors oppikken. Gladde, weinig wrijvingsrijke monsters zoals bepaalde houtsoorten, metalen en kunststoffen produceerden sensorsignalen die op regelmatige manieren varieerden met de snelheid, wat leidde tot zeer accurate snelheidsherkenning. Daarentegen gaven zachte of onregelmatige oppervlakken zoals gaas en sommige huiden meer chaotische signalen, waardoor het lastiger werd om snelheid te schatten. Voor richting gaven oppervlakken met duidelijke nerf of lijnpatronen de helderste resultaten, omdat schuren dwars op of langs de nerf zeer verschillende trillings- en geluidspatronen opleverde. Materialen met pluizige of vervormbare oppervlakken kantelden die verschillen vaak richting vervaging.
Wat dit betekent voor toekomstige tastoepassingen
Voor niet-experts is de kernboodschap dat we nu een publieke, goed georganiseerde bibliotheek van raakdata hebben die koppelt hoe iets eruitziet met hoe het klinkt en aanvoelt bij vele bewegingen. Deze bron zou het eenvoudiger moeten maken om telefoons, controllers en virtualreality-systemen te ontwerpen die realistisch reageren wanneer u veegt of tikt, en om robots te trainen die materialen via aanraking kunnen beoordelen. Omdat onderzoekers wereldwijd de dataset en de bijbehorende code kunnen downloaden, kunnen ze methoden eerlijk vergelijken en op elkaars werk voortbouwen — net zoals beeldendatabases dat voor computer vision mogelijk maakten.
Bronvermelding: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
Trefwoorden: haptische textuurdataset, tactiele sensoren, haptiek voor virtual reality, robot aanraking, multimodale machine learning