Clear Sky Science · tr
Kümelenmiş Haptik Doku Veri Seti: Değişken Hız-Yön Kayma Temaslarıyla Haptik Doku Veri Seti
Dokunma verileri dijital yaşamınız için neden önemli
Kumaş gibi hissettiren telefonlar, ahşap damarını algılamanızı sağlayan sanal gerçeklik ve deri ile camı ayırt edebilen robotlar tek bir şeye dayanır: dokunma hakkında iyi verilere. Kameralar ve mikrofonlar için büyük halka açık veri setleri varken, dokunma duyumuz aynı titizlikle toplanmış referanslardan yoksundu. Bu makale bu boşluğu dolduran yeni bir veri seti tanıtıyor; farklı yüzeylerin bir parmak ucunun çeşitli hareketleri sırasında nasıl hissettirdiğine dair ayrıntılı bir kütüphane sunuyor.
Gerçek dünya yüzeylerinden oluşan bir kütüphane
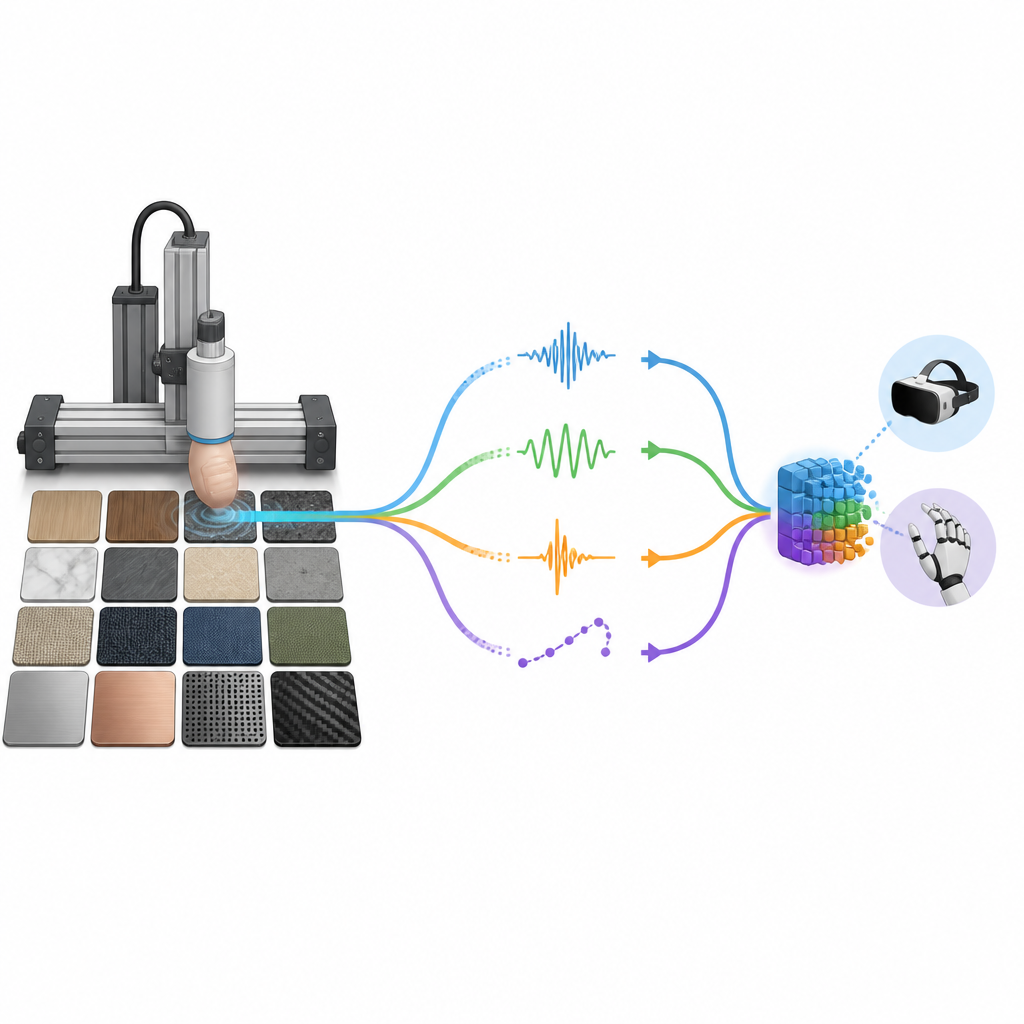
Ekip, 118 günlük malzemeden alınan kayıtların yer aldığı Kümelenmiş Haptik Doku Veri Seti diye adlandırdıkları koleksiyonu oluşturdu. Bunlar arasında ahşap, taş, cam, metal, plastikler, kumaşlar, seramikler, kompozitler ve çeşitli deriler bulunuyor. Yüzeyleri kendi tarzlarında keşfetmeleri için insan gönüllülere güvenmek yerine, araştırmacılar yumuşak kauçuktan yapılmış yapay bir parmak ucu kullandılar. Bu parmak ucu her yüzeye sıkı kontrollü koşullar altında bastırılıp kaydırıldı, böylece ortaya çıkan veriler malzemeler ve hareket örüntüleri arasında adil biçimde karşılaştırılabiliyordu.
Dinleyen ve hisseden bir robot parmak
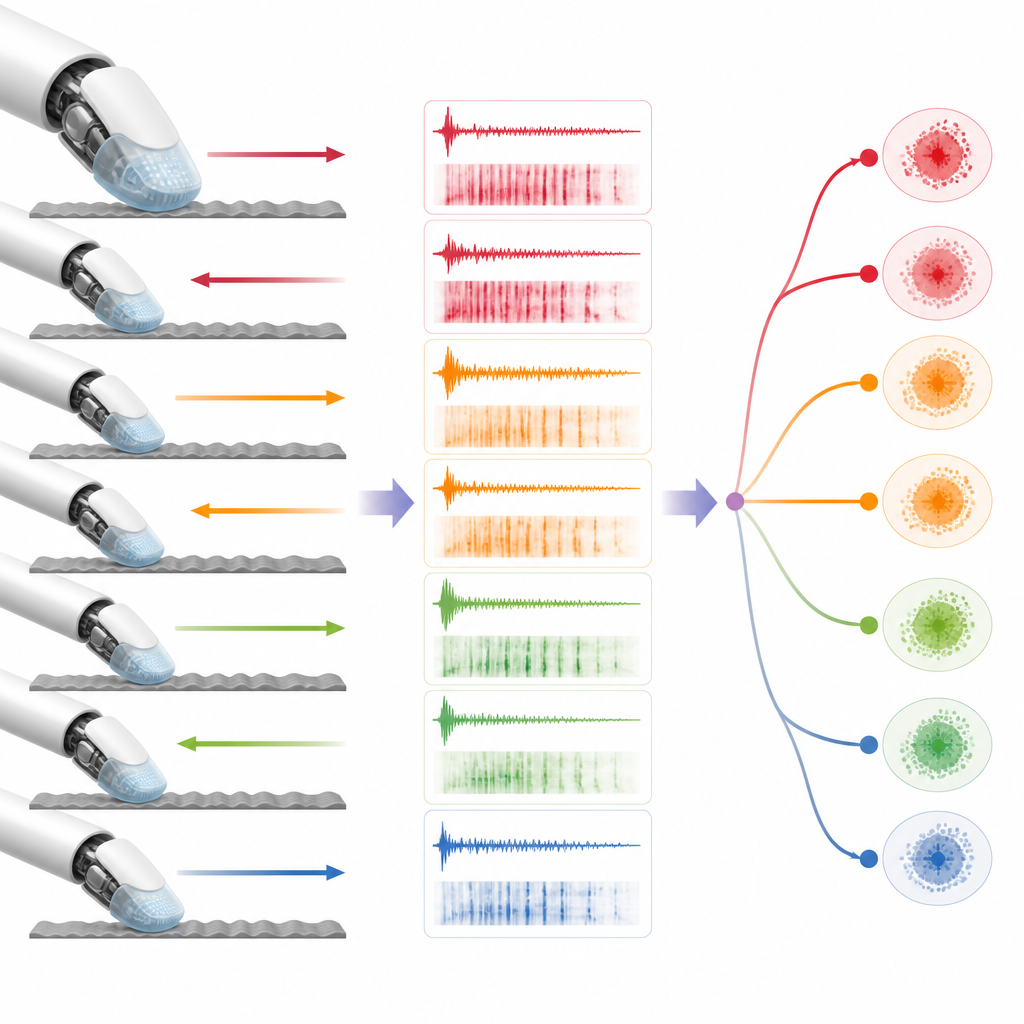
Verileri toplamak için araştırmacılar bir üç eksenli 3B yazıcıyı, kauçuk parmak ucunu yüksek doğrulukla hareket ettirebilecek şekilde modifiye etti. Uç her yüzey üzerinde kayarken mikrofonlar küçük sesleri kaydetti, bir ivmeölçer titreşimleri izledi, bir yük hücresi temas kuvvetini ölçtü ve makine parmak ucu pozisyonunu kaydetti. Ölçümler bir ses geçirmez kutu içinde yapıldı ve ekip daha sonra makinenin uğultusunu temizlemek için aktif gürültü iptal uyguladı. Her malzeme için beş kayma hızı, sekiz yön ve iki kuvvet düzeyi test edildi ve her durum iki kez tekrarlandı. Bu, yüzey başına 160 hareket koşulu ve toplamda 18.880 eşzamanlı kayda, ayrıca yüksek çözünürlüklü görüntülere ve sürtünme ölçümlerine yol açtı.
Ham dokunmadan işe yarar sinyallere
Verileri toplamak hikâyenin sadece bir parçası. Yazarların ayrıca verilerin bilgisayarların öğrenebileceği örüntüler içerdiğini göstermesi gerekiyordu. Ses ve titreşim kayıtlarını renkli zaman-frekans haritalarına dönüştürdüler ve dokuları, hızları ve yönleri tanımak için farklı tür algoritmalar eğittiler. Konvolüsyonel sinir ağlarına dayanan derin öğrenme modelleri özellikle iyi performans gösterdi; hem ses hem titreşim verildiğinde yüzey türünü yaklaşık yüzde 96 oranında doğru tanımladı. Ayrıca kayma hızını yaklaşık yüzde 89 doğrulukla ve yönü yaklaşık yüzde 79 doğrulukla tahmin ettiler; bu da kayıtların parmak ucunun nasıl hareket ettiğine dair zengin ipuçlarını koruduğunu ortaya koydu.
Hız ve yön değiştiğinde neler oluyor
Veri seti ekip tarafından malzeme özelliklerinin dokunma sensörlerinin algıladıklarını nasıl etkilediğini sorgulamayı mümkün kıldı. Bazı ahşaplar, metaller ve plastikler gibi pürüzsüz, düşük sürtünmeli örnekler, hız değiştikçe düzenli biçimde değişen sensör sinyalleri üretti ve bu da hız tanımayı çok hassas hale getirdi. Buna karşılık, gazlı bez ve bazı deriler gibi yumuşak veya düzensiz yüzeyler daha kaotik sinyaller oluşturdu; bu da hız tahminini zorlaştırdı. Yön için ise belirgin damar veya çizgili desenleri olan yüzeyler en net sonuçları verdi; çünkü damarın aksi yönde veya boyunca kaydırmak çok farklı titreşim ve ses örüntüleri üretti. Kabarık veya deformasyona uğrayan yüzeyler bu farklılıkları bulanıklaştırma eğilimindeydi.
Geleceğin dokunma teknolojisi için anlamı
Uzman olmayanlar için ana mesaj, artık bir şeyin nasıl göründüğünü, nasıl ses çıkardığını ve çeşitli hareketler altında nasıl hissettirdiğini ilişkilendiren halka açık, iyi düzenlenmiş bir dokunma veri kütüphanemizin olmasıdır. Bu kaynak, kaydırma veya dokunma yaptığınızda gerçekçi tepki veren telefonlar, kontrol cihazları ve sanal gerçeklik sistemleri tasarlamayı ve materyalleri dokunarak değerlendirebilen robotları eğitmeyi kolaylaştırmalıdır. Dünyanın dört bir yanındaki araştırmacılar veri setini ve ilişkili kodları indirerek yöntemleri adil biçimde karşılaştırabilir ve görüntü veri setlerinin bilgisayarlı görü için yaptığı gibi birbirlerinin çalışmalarının üzerine inşa edebilirler.
Atıf: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
Anahtar kelimeler: haptik doku veri seti, dokunsal algılama, sanal gerçeklik haptikleri, robot dokunuşu, çok modlu makine öğrenimi