Clear Sky Science · en
Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts
Why touch data matter to your digital life
Phones that feel like fabric, virtual reality that lets you sense wood grain, and robots that can tell leather from glass all rely on one thing: good data about touch. While cameras and microphones have huge public datasets to learn from, our sense of touch has lacked the same kind of carefully collected reference. This paper introduces a new dataset that fills that gap, giving scientists and engineers a detailed library of how different surfaces feel when a fingertip moves over them in many ways.
A library of real world surfaces
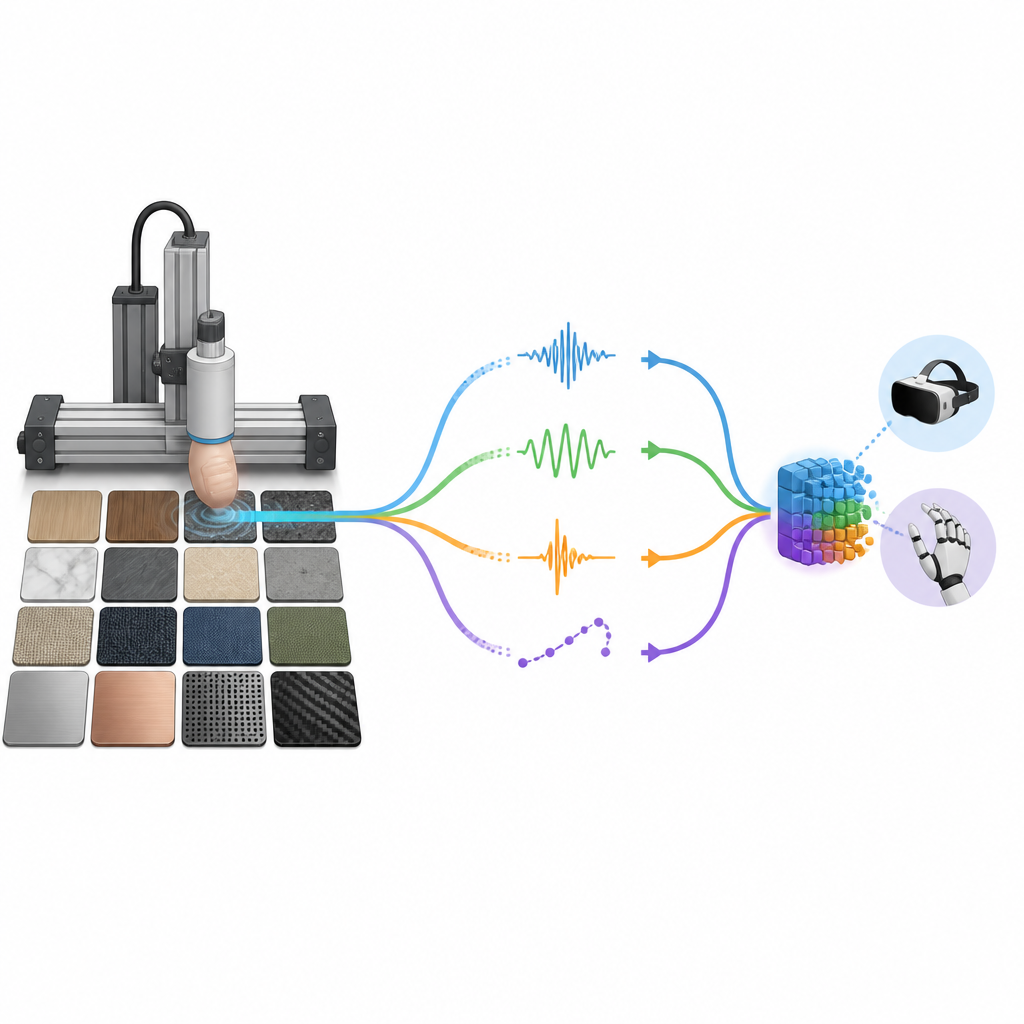
The team built what they call the Cluster Haptic Texture Dataset, a collection of recordings from 118 everyday materials. These include wood, stone, glass, metal, plastics, fabrics, ceramics, composites, and various leathers. Instead of relying on human volunteers to explore surfaces in their own style, the researchers used an artificial fingertip made of soft rubber. This fingertip was pressed and slid across each surface under tightly controlled conditions so that the resulting data could be compared fairly across materials and motion patterns.
A robot finger that listens and feels
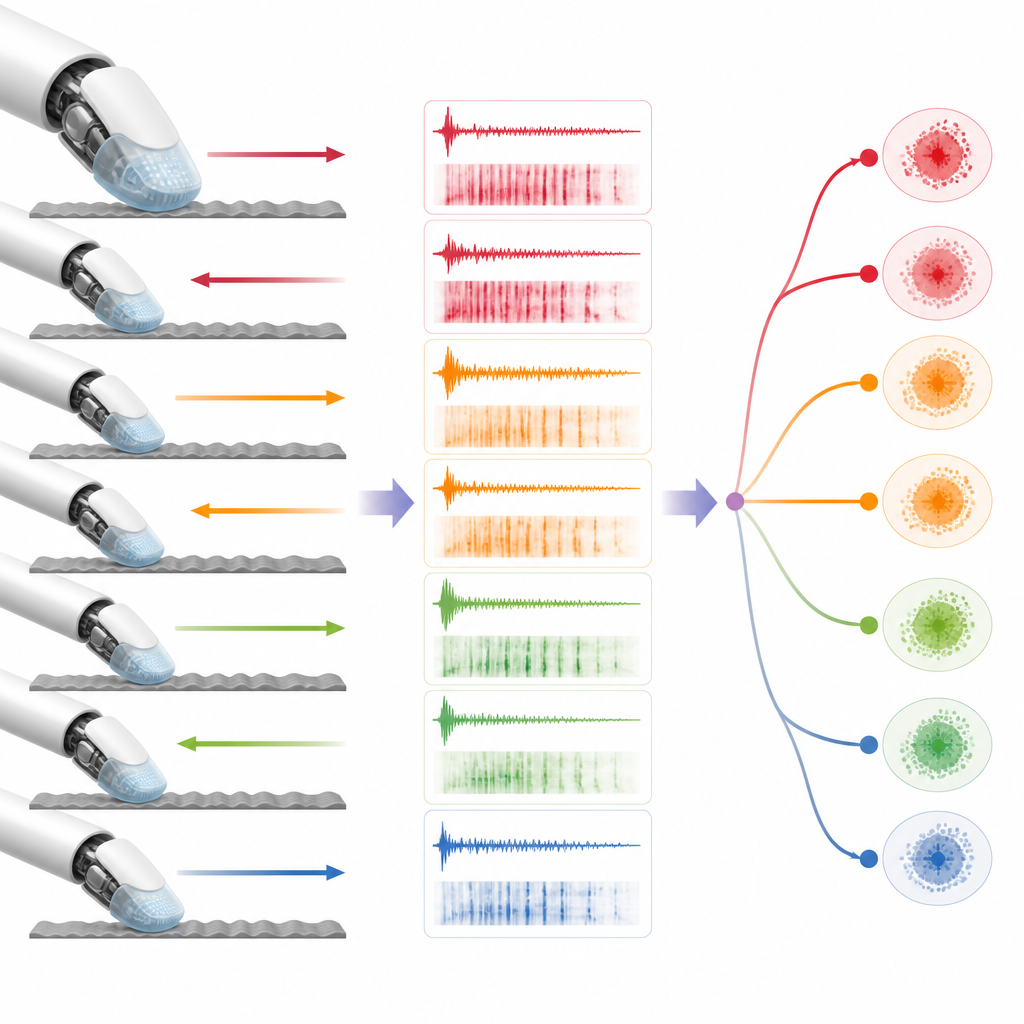
To gather the data, the researchers modified a three axis 3D printer so it could move the rubber fingertip with great precision. As the tip slid over each surface, microphones recorded the tiny sounds, an accelerometer tracked vibrations, a load cell measured contact force, and the machine logged the fingertip position. Measurements were taken inside a soundproof box, and the team applied active noise cancellation afterward to strip away the hum of the machine. For each material they tested five sliding speeds, eight directions, and two force levels, repeating each case twice. This produced 160 motion conditions per surface and a total of 18,880 synchronized recordings, along with high resolution images and friction measurements.
From raw touch to useful signals
Collecting the data is only part of the story. The authors also needed to show that it contains patterns that computers can learn from. They converted the sound and vibration recordings into colorful time–frequency maps and trained different types of algorithms to recognize textures, speeds, and directions. Deep learning models based on convolutional neural networks performed especially well, correctly identifying the surface type about 96 percent of the time when given both sound and vibration. They also estimated sliding speed with about 89 percent accuracy and direction with about 79 percent accuracy, revealing that the recordings preserve rich clues about how the fingertip was moving.
What changes with speed and direction
The dataset allowed the team to ask how material properties influence what touch sensors pick up. Smooth, low friction samples such as certain woods, metals, and plastics produced sensor signals that varied in regular ways as speed changed, leading to highly accurate speed recognition. By contrast, soft or irregular surfaces like gauze and some skins created more chaotic signals, which made speed harder to estimate. For direction, surfaces with strong grain or lined patterns gave the clearest results, because sliding across or along the grain produced very different vibration and sound patterns. Materials with fuzzy or deformable surfaces tended to blur out these differences.
What this means for future touch technology
For non experts, the key message is that we now have a public, well organized library of touch data that links how something looks with how it sounds and feels under many ways of moving. This resource should make it easier to design phones, controllers, and virtual reality systems that respond realistically when you swipe or tap, and to train robots that can judge materials by touch. Because researchers around the world can download the dataset and the related code, they can compare methods fairly and build on one another’s work, much as image datasets have done for computer vision.
Citation: Eguchi, M., Hayase, T., Hiroi, Y. et al. Cluster Haptic Texture Dataset: Haptic Texture Dataset with Varied Velocity-Direction Sliding Contacts. Sci Data 13, 756 (2026). https://doi.org/10.1038/s41597-026-06760-z
Keywords: haptic texture dataset, tactile sensing, virtual reality haptics, robot touch, multimodal machine learning